 천체역학
천체역학 최규홍 서울대학교 천문기상학과 졸업 미국 펜실베이니아 대학 천체물리학 박사 미국 COMSAT 선임연구원 한국천문학회 학회장 현재 연세대학교 천문우주학과 교수 한국우주과학회 학회장 논문 ‘Pla neta r y Nebula in Planeta r y and Sy st em s 외 다수
천체역학
 천체역학
천체역학
머리말 천체역학은 Ty c ho Brahe0545-1601) 의 20 년에 걸친 행성 운동에 대한 관 측 옹 그의 제자인 Joh anes Ke p ler(1571-1630) 가 정리하여 3 개 의 법칙을 도 출 해 냄으로써 비로소 시작되었다. 다시 Ke p ler 의 법칙을 이론적으로 연구하여 만유인력을 발견한 이 가 Issac New t on0642 - 1727) 이다. New t on 이 완성한 역학 이론은 Descarte s , Lag ran g e , Lap la ce, Leg e ndre, Encke, Hami lton 등에 의 해 체 계 화되 었다. 특히 Lag r ang e (1736-1813) 에 의 해 1772 년에 3 체 문제 의 특수 해가 얻어졌지만, 이후 130 년이 지난 후에야 태양-목성 윤 믿변으로 하는 정삼각형의 꼭지점, 죽 3 체 문제의 해에 해당하는 지점에 소행성이 존재하고 있다는 것이 확인됨으로써 바로소 관측을 동해 증명되었다. 그리고 섭동론에 자주 쓰이는 매개 변수의 변화법 혹은 궤도 요소의 변화법도 1782 년 La gr an g e 에 의해 이루어진 업적 이다. 19 세 기 에 들어 와서 는 Hi ll, Ti ss erand, Poin c are, Moulto n , Whit ta- ker, Bir k hoff 등이 활동하였다. H ill과 T i sserand 는 달과 행성의 운 동을, Po i ncare 와 B i rkho ff는 3 체 문제 의 수학적 인 해 의 존재 론을 연 구하였고, Wh itt aker 는 해석역학에 관심을 가지고 연구하였다. 1902 년 Moul t on0872-1952) 은 이제까지의 어렵게 쓰여전 천체역학의 교 과서를 스칼라 양으로 아주 쉽게 써서 수많은 천문학자들에게 호평을 받기도 했다. 최근의 천체역학은 1957 년 10 월 4 일 인류 최초의 인공위성인 구소 련의 S pu t n i k 의 발사를 계기로 활발한 연구가 시작되었다. 이제까지
고전역학이라 불리던 천체역학이 위성 발사를 계기로 각광을 받기 시 작하였고, 이 부분의 연구가 마국 동부 그룹과 서부 그룹의 주도로 전행되었다. 미국 동부 그룹은 예일 대학을 중심으로 Dir k Brouwer(1 9 02- 19 66) 의 지도 아래 주로 순수 학문적인 천체역학에 관심을 가지고 연구하 였고, 미국 서부 그룹은 Samuel Herr ic k (1 911 - 1974) 의 지도 아래 주 로 천체역학의 응용 분야인 우주동력학에 관심을 가지고 연구하였다. 이들 그룹의 연구의 공통적인 홍미는 인공위성과 태양계 내의 위성 에 응용할 수 있는 위성 궤도 역학이었다. Herr ic k 는 천체역학을 풀기 위해, 일반적인 변수라는 새로운 변수 를 도입한 정칙화의 방식으로 쉽게 문제에 접근하였는데, 그가 연구 한 특수 섭동에 관한 이론은 일반 섭동론으로서 얻어지는 Brouwer 의 결과보다 우수하다는 것이 여러 문제를 통해서 증명되었다 . 예일 그 룹에서 주최하는 여름 학회에는 주로 Brouwer, Clemence, Eckert, Hag iha ra, Herge t 등의 강의 가 많았다. 미국 서부 지역의 Herr ic k 의 학교에는 Baker, Breakwell, Broucke, Brys o n, Escobal, Jun kin s , Leit m ann 등이 주로 활동하였고, 미국 동 부 그 룹 의 Danby , Davis , Duncombe, Garfi nk el, Hori, Messag e , Musen, Rabe, Szebehely, Vi nt i 등도 가끔 동조하곤 하였다. 현재에는 약 150 여 명의 천체역학 연구자가 열심히 활동을 하고 있 으며, 특히 오스틴 (Aus ti n) 의 텍사스 대학에 많이 있다. 다음은 구소련의 활동상을 살펴보자. 구소련이 1957 년 최초의 인공위성을 발사할 수 있었던 저력은 일찍 이 천체역학에 대한 연구가 있었기 때문이다. 이러한 연구의 선구자 적인 역할은 천문학뿐만 아니라 우주동력학을 연구하였던 G. N. Dubosh i n(1904-1986) 에 의해서 이루어졌다. 그는 Co p ern ic us 가 탄생 한 토룬 (Torun) 에 서 박사학위 를 받고, 모스 크바 대학에서 25 년간 천체역학과의 학과장을 맡았었다. 지금도 모스
크바 대학의 그의 그룹과 레닌그라드의 이론 천문학 연구소에서는 천 체역학과 우주동력학의 기초 연구를 수행하고 있다. 현재 구소련에서 활약하고 있는 학자는 Abhy a nkar, Aksenov, Aleksev, Anasova, Arnold, Brumberg, Chebota r ev, Chta y ev , Demi n, Duby a g o , Eg o rov, Elya sberg, Faddeev, Fasenkov, Kolmog o rov, Kryl o v, Ly a p u nov, Merman, Mois s eie v , Orlov, Subboti n 등이 있다. 그리고 국제적으로 유명한 천체역학에 관한 학술지는 Celetia l Mechan i cs 로써 1969 년부터 매년 4 권씩 발행되어 오고 있다. 천체역학에서는 2 체와 3 체 문제가 가장 많이 연구된다. 2 체 문제는 New t on 의 만유인력 법칙에 따라 움직이는 2 개의 물체 사이의 운동에 관한 문제이다 • 이것은 Euler 에 의해서 완전한 해를 얻었다. 그러나 New t on 의 동력법칙에 따라 움직이는 3 체 문제는 임의의 질량과 임의 의 초기 조전에 관해서 푸는 일반 해가 없다. 과거의 수백년 동안 유 명한 수학자, 천문학자, 물리학자가 이 문제에 관해서 홍미를 가지고 도전하였지만 일반 해는 구하지 못하였다. 다만 La gr an g e 에 의해서 임의의 질량이 직선상의 평형점 (LI , L2, L3) 에 놓일 때와 정삼각형 의 꼭지점 (L4, LS) 에 있을 때만 얻을 수 있는 특수 해를 구했을 뿐 이다. 최근에는 천체물리에서 La gr an g e 의 특수 해롤 광범위하게 옹 용하곤 한다. 3 체 문제에 관해서 일반 해를 구하지 못하는 이유는 적분상수의 부 족에 있다. 우리는 오직 12 개의 적분상수만 얻을 수가 있기 때문이 다. 죽 에너지의 적분으로부터 1 개의 적분상수, 각운동량 보존에서 3 개의 적분상수, 질량 중심에 관한 적분으로부터 위치와 속도에 관한 6 개의 적분상수-이러한 10 개의 적분상수를 고전적인 Euler 의 적 분이라고 부른다-그리고 J acob i가 발견한 교점의 소거에서 얻는 또 하나의 적분상수가 있다. 이들 12 개의 적분상수를 사용하면 N 체 의 문제에서 나타나는 6N 개의 미분 방정식 중 (6N-12) 개의 미분 방 정식이 남게 되는데 그 결과 2 체 문제에 대해서만 적분상수의 부족이
이러한 현실적 상황을 고려하여 이 책에서는 천체역학의 이론적인 면과 함께 응용적인 분야도 다양하게 다루었다. 제 1 장에서는 시간계와 좌표계의 개념에 대해서 서술하였고, 제 2 장에서는 2 체 문제를 다루었다. 2 체 문제는 뉴턴의 운동 법칙에 따라 움직이는 두 개의 물체 사이의 운동을 기술하는 것인데, 오일러가 구 한 완전한 해에 의하면 두 물체의 운동은 초기의 에너지 상태에 따라 원, 타원, 포물선, 쌍곡선의 궤도를 가진다. 이 책에서는 원과 타원 궤도의 경우뿐만 아니라 지구를 탈출하는 행성간 우주선의 궤도인 쌍 곡선 궤도에 대해서도 자세히 설명하였다. 제 3 장에서는 3 체와 N 체 문제를 다루었다. 이미 언급했듯이 3 체 문제와 N 체 문제는 임의의 질량과 초기 조건에 관해서 얻어지는 일 반 해가 존재하지 않으며, 오직 제한 3 체 문제의 경우에만 그 해를 구해낼 수 있다. 또한, 이러한 계에서 2 개의 물체가 충돌하는 경우 특이점이 발생하게 되고, 이것을 해결하는 것이 중요한 문제로 나타 난다. 이러한 점을 고려하여 이 책에서는 3.1 - 3 . 3 절에서 제한 3 체, 3 체, N 체 문제 들에 대해서 각각 설명하고 그 해를 구해 보았으며, 3.4 절에서는 특이점과 이것을 해결하는 정칙화의 방법에 대해 서술하 였다. 제 4 장은 특수 섭동론과 일반 섭동론을 다루었다. 4.1 절에서는 위 성의 위치와 속도를 구하는 특수 섭동론 중 Cowell 방법과 Encke 방 법에 대해 설명하였고, 4.2 절에서는 일반 섭동론에 있어서의 다양한 섭동 함수와 그 요인들에 대해 살펴보았으며, 기존에 다루어왔던 6 개 의 궤도 요소 (a, e, i, (J}, 요, M) 뿐만 아니라, 각 궤도 요소에서 특이점이 생기는 경우 새롭게 정의된 궤도 요소들에 대해서도 각각의 섭동 방정식을 만들어 일반 섭동론을 적용하였다. 또한, 4.3 절에서는 앞에서 살펴본 섭동 함수를 전개시키는 방법으로써 컴퓨터에 의한 수 식 처리에 대해 알아보았다. 제 5 장은 천체역학의 응용에 대해서 다루었다. 먼저, 위성의 궤도
에 대한 관측 자료를 미분 보정하는 방법을 제시하고, 1960 년부터 연 구되 기 시 작한 위 성 의 궤 도에 대 한 F il t er i n g의 최 근 분야인 Kalman Fil t e r in g 이론을 소개하였다. 또한, 정지 위성의 위치 보정 방법과 인공위성 궤도의 종류 및 특성에 대해서도 개괄적으로 설명하였다. 필자의 대학원 강좌인 〈 천체역학 1 〉 을 수강하면서 구술된 강의를 강좌별로 정리하여 컴퓨터에 입력하여 준 김동규, 이정주, 김건우, 김지영, 조정호, 김방영, 김동우, 우병삼, 김응현 제군에게 감사하 며, 특 히 수식과 전체적인 문맥을 정리하여 준 이성훈 군에게 진심으 로 감사 를 드 린다. 이 논저가 나오기까지 도와주신 대우재단과 출판에 힘을 써 주신 민음사에 감사 를 드린다. 1997. 2. 위성 궤도 공학 연구실에서 최규홍
차례
머리말 • 3제 1 장 좌표계와 시간계 151.1 좌표계 151.1.1 수평 좌표계 • 161.1.2 적도 좌표계 • 181.1.3 황도 좌표계 • 191.1.4 지리 좌표계 • 201.2 시간계 241.2.1 줄리언일과 그레고리안일 • 241.2.2 그리니치 시간각과 세계시 • 25참고문헌 • 28제 2 장 2체 문제 292.1 질량 중심 운동과 상대 운동 292.1.1 질량 중심 운동 • 292.1.2 상대 운동 • 312.2 케플러 방정식 342.2.1 케플러 방정식의 해 • 372.3 타원 궤도 402.3.1 타원 궤도 상의 속도 • 412.3.2 타원 궤도 상의 위치 • 462.4 포물선 궤도 47
2.5 쌍곡선 궤도 492.6 호도그래프 572.7 케플러 운동의 전개 602.8 응용 622.8.1 f와 g 급수전개 • 622.8.2 f와 g 급수전개의 해석적 표현 • 652.8.3 2체 운동의 계산 알고리즘 • 682.8.4 위성의 출몰 시각 • 712.8.5 우주 속도 • 752.8.6 행성간 우주선 • 77참고문헌 • 81제 3 장 3체 문제와 N체 문제 833.1 제한 3체 문제 833.1.1 원 궤도인 경우 • 843.1.2 타원 궤도의 경우 • 873.1.3 영 속도 곡선 • 923.1.4 천체물리학에의 응용 • 1003.2 3체 문제 1013.2.1 운동 방정식 • 1013.2.2 라그랑지안 해와 오일러 해 • 1043.3 N체 문제 1093.3.1 운동 방정식 • 1123.3.2 항성역학에의 응용 • 1143.3.3 N체 계산 • 1173.4 특이접과 정칙화 120
3.4.1 Levi-Civita 방법 • 1303.4.2 Kustaanheimo-Stiefel 방법 • 135참고문헌 • 140제 4 장 섭동론 1434.1 특수 섭동론 1434.1.1 Cowell 방법 • 1444.1.2 Encke 방법 • 1554.2 일반 섭동론 1614.2.1 매개변수의 변화 • 1624.2.2 섭동 방정식 • 1774.2.3 섭동 함수 • 1934.2.4 지구 중력장에 의한 섭동 • 2024.2.5 달과 태양에 의한 섭동 • 2194.3 컴퓨터에 의한 수식 처리 2334.3.1 기본 이론 • 2334.3.2 컴퓨터 알고리즘 • 236참고문헌 • 241제 5 장 천체역학의 응용 2435.1 인공위성 관측자료의 미분 보정 2435.1.1 배치 모드 • 2485.1.2 연속 모드 추정 알고리즘 • 2685.1.3 확장 칼만 필터 • 2725.2 정지 위성 궤도에의 응용 278
5.2.1 동서 방향 위치 유지 • 2785.2.2 남북 방향 위 치 유지 • 2975.3 인공위성의 특수 궤도 3025.3.1 지구 정지 궤도 • 3035.3.2 경사진 타원 궤도 • 3145.3.3 문드라/고리 궤도 • 3165.3.4 태양 동주기 궤도 • 3195.3.5 통신용의 저고도 위성 • 3235.3.6 준태양 동주기 궤도 • 330참고문헌 • 331부록 • 333찾아보기 • 339제 1 장 좌표계와시간계 천문학과 천체역학에서 가장 기본이 되는 것은 좌표계와 시간 계이며, 이러한 이해를 바탕으로 하여 문제의 대수적인 해를 구 할 수 있다. 특히, 우주 공간에 있는 천체나 물체를 관측하거나, 그 관측 자료를 이용하여 그들의 정확한 위치와 속도를 계산하려 고 할 때 적절한 시간계와 좌표계를 선택하는 것이 매우 중요하 다. 이러한 시간계와 좌표계는 각각 기준점과 기준시각을 가지게 되며, 이들은 서로 밀접하게 연관되어 있으므로, 하나의 시간계 와 좌표계에서 관측된 자료들은 다른 시간계와 좌표계로 변환될 수 있다. 이 장에서는 이와 같은 여러 종류의 좌표계와 시간계에 관하여 논의하여 보도록 하겠다. 1.1 좌표계 어떤 물체의 위치를 나타내기 위해서는 그에 적절한 좌표계를 선정해야만 하며, 이러한 좌표계는 보통 기준축과 기준평면으로
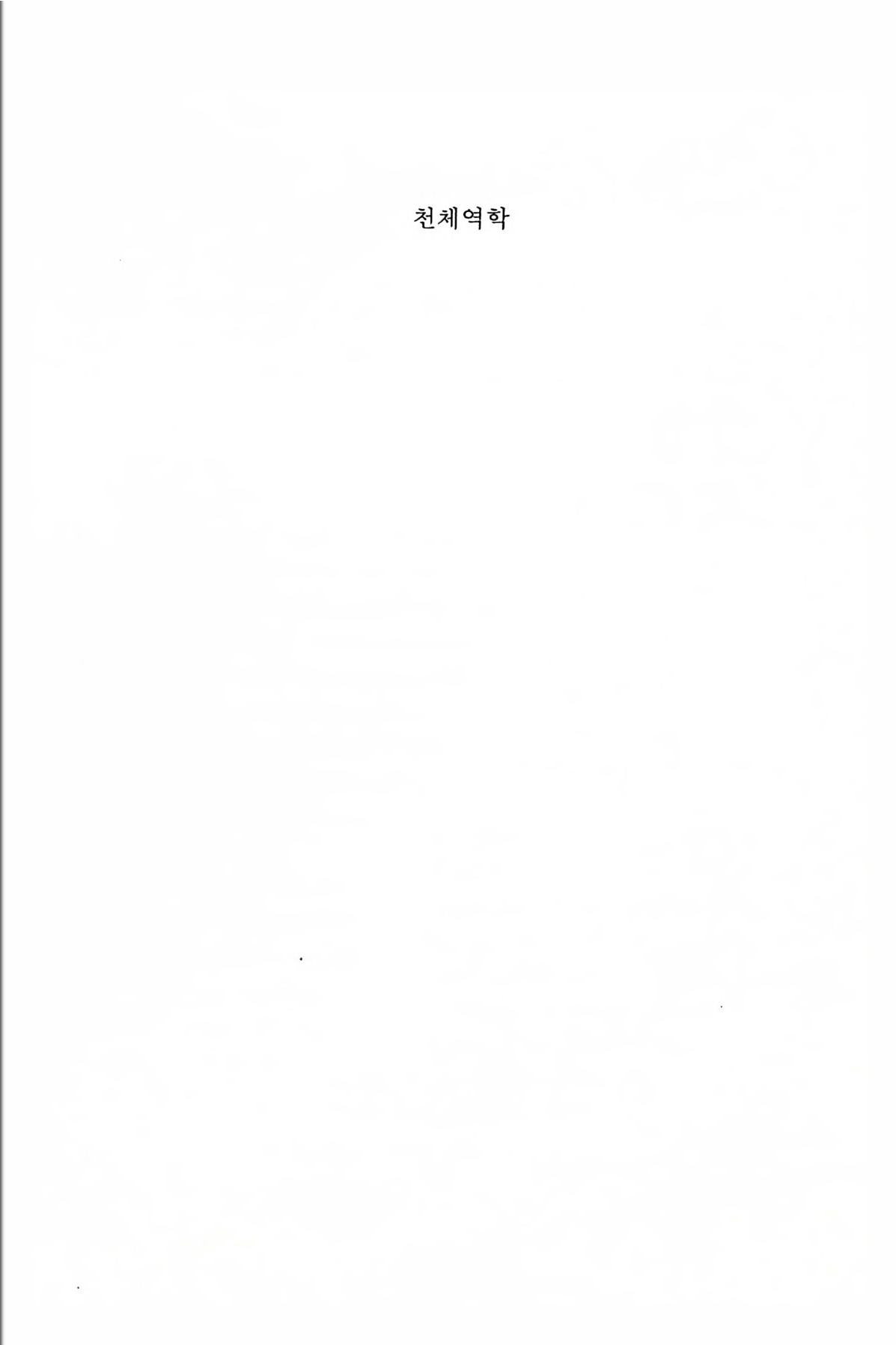
정의된다. 일반적인 경우 지구의 적도를 천구에 두영시킨 것을 천구의 적도라고 하는데, 이때의 적도면이 기준평면으로 많이 사 용된다. 또한, 기준평면에서 특별한 축에 방향을 고정하면 이 를 기준축으로 사용할 수 있는데, 천구의 적도가 기준평면인 경우 기준축은 보통 춘분점의 방향을 선택하며 이 방향이 X 축 이 된 다. 이 경우 좌표계의 기준축은 느린 세차 운동 을 하기 때 문 에 가장 일반적인 좌표계라도 특별한 기준시각이 고정되어야만 한다. 지구는 찌그러진 타원체 모양이므로 태양이나 달 의 섭동은 기 준평면과 기준축의 위치를 주의해서 기술하여야 한다. 보통 춘분 점은 약 26,000 년 주기로 일정한 세차 운동을 하며, 달의 영향 때문에 약 18.6 년의 주기로 변화가 나타난다. 이 짧은 주기의 변 화를 흔히 장동이라고 한다. 이러한 세차 운동과 장동의 영향으 로 기준축의 방향이 시간에 따라 변화하여 위치의 변화를 가져오 게 되므로 행성이나 지구의 위치를 정확히 알기 위해서는 기준 축 의 기준시각을 변화시키는 세차나 장동 또는 다른 원인들을 보정 해 주어야 한다. 1.1.1 수평 좌표계 회전하는 행성 표면에 있는 관측자는 회전 좌표계에서 모든 물 체를 보게 된다. 이 경우 좌표계의 원점은 관측자가 되고 관측자 의 지평선이 기준평면이 되며, 기준축은 관측자와 북쪽을 연결한 선이 다. 따라서 이 좌표계는 관측자 중심 좌표계 (top o centr i c coordin a te sys t e m ) 라고 할 수 있으며 , 그립 1-1 과 같은 모양으 로나타낸다. 이 좌표계에서는 관측된 물체의 고도 (h) 와 방위각 (A) 을 이용
 + zh
+ zh
하여 그 물체의 위치를 나타내어 주는데, 여기서 고도 (h) 는 기 준평면으로부터 관측된 천체의 자오선을 따라 그 천체까지 잰 각 이고, 방위각 (A) 은 기준점(북접)에서 동쪽으로 물체의 자오선까 지 기준평면을 따라 측정한 각으로서 정의가 된다. 이 경우 관측 자로부터 물체까지의 거리는 일반적으로 g로 표시된다.
표 1-1 수평 좌표계에서 변수들의 범위 변수 의미 범위 h 지평선 윗방향으로 (+)방향 -90•:;;;; h :;;;;go • A 북쪽으로부터 수평 선을 따라 동쪽으로 (+) 방향 0°~A<360° Ph 시선 거리 o
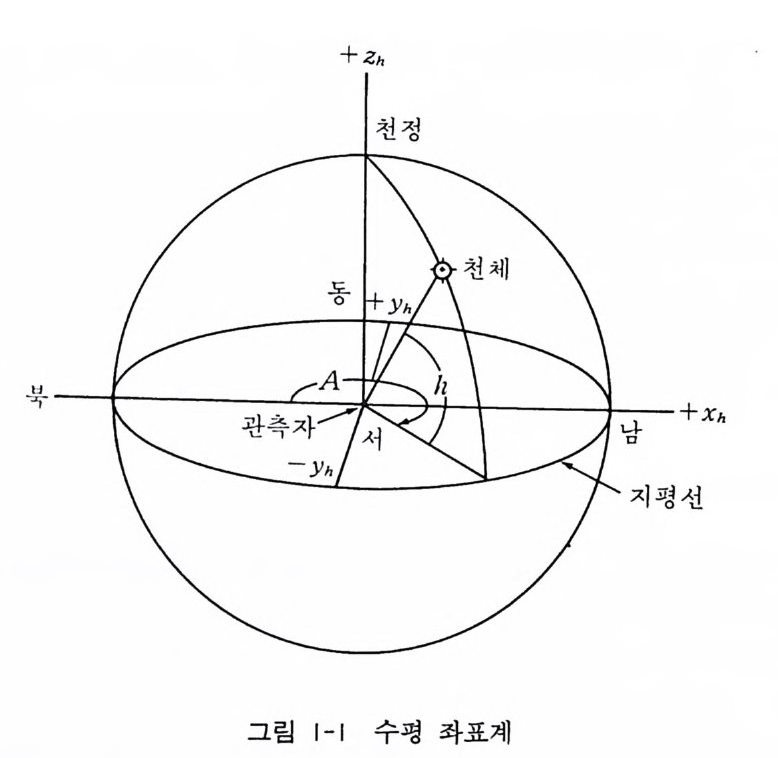
1.1.2 적도 좌표계 적도 좌표계는 천문학이나 천체역학에서 가장 많이 사용하는 기본 좌표계이다. 이 좌표계는 지구의 중심을 원점으로 하는 지 구 중심 좌표계로서 기준평면은 지구의 적도를 천구상에 무영한 천구의 적도이고, 적도면에서 춘분점 (r) 방향을 기준축으로 한 다. 관측하고자 하는 천체의 위치를 나타내기 위하여 그립 l ~ 2 에 서와 같이 적경 (a) 과 적위 (8) 를 정의하여 사용한다. a( 적경) : 춘분점으로부터 천구상의 물체가 있는 자오선까지 천구의 적도평면을 따라 측정한 각 8( 적위) : 적도평면에서 천체의 자오선을 따라 천체까지 측정한 각
 +z
+z
표 1-2 적 도 좌표계에서 변수 들 의 범위 변수 의미 범위 a 북 극에서 봤 을 때 반시계 방향이 ( + )방향 0°s : hs :36 0° 8 적도면에서 북쪽으로 (+)방향 -9 0°==::;A==::;-90• r 지구 중심에서 천체까지의 거리 O< r
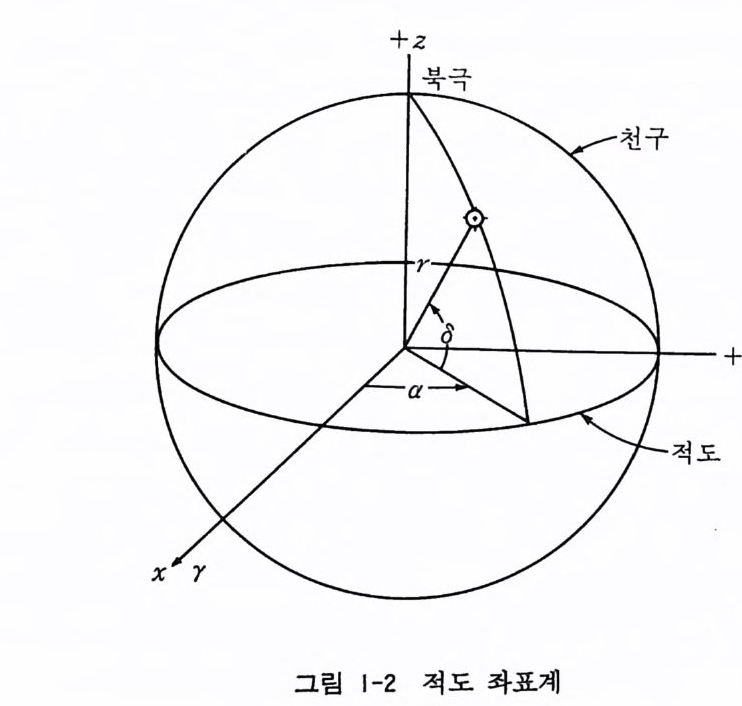
일반적인 경우 이 좌표계에서 지구 중심에서 천체까지 거리는 r 로 표 시된다. 1.1.3 황도 좌표계 황도 좌표계는 적도 좌표계와 비슷한 형태를 갖는 좌표계로서 태양계 내의 천체들(행성, 달, 소행성 , 혜성 등)의 위치를 표시하 는 데 주로 사용된다. 이 좌표계는 적도면과 약 23 . 5° 가 기울어 져 있는 지구의 공전 궤도면을 기준 평면으로 하고 있으며, 적도 좌표계와 마찬가지로 춘분점 방향을 기준축으로 하여 천체들의 위치 를 나타내고 있다. 때문에 그림 1-3 에서 보는 바와 같이 적 도 좌표계를 23.5° 기울여 놓은 형태를 가지며, 적위 대신에 황 위 (/3), 적경 대신에 황경 (A) 이 좌표로 사용된다. /3(황경) : 춘분점으로부터 천구상의 물체가 있는 자오선까지 황도면 을 따라 측정한 각 A( 황위)황도면에서 천체의 자오선을 따라 천체까지 측정한 각
\ ;::;표] :1:-3 :으황 :도: :좌l표)계:에 :~서이 의( +변)수방들향의 범위, -90~범A위~ -90° 0°~h~360°
 황도 의
황도 의
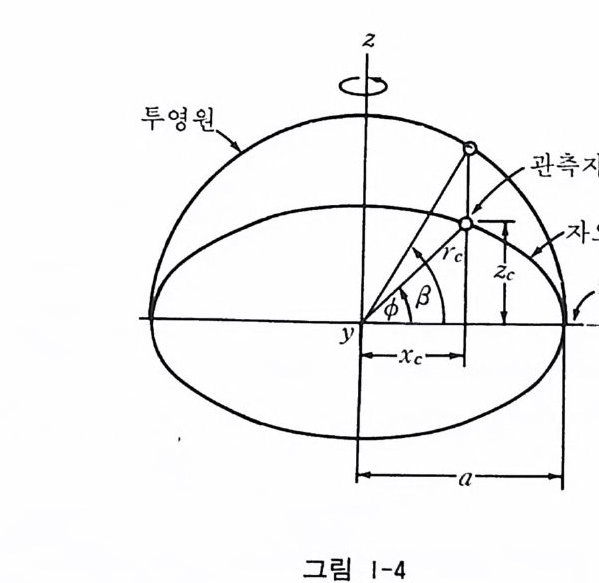
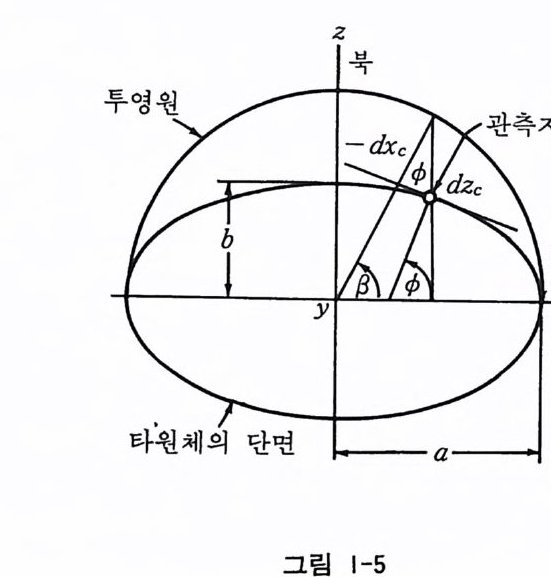
1.1.4 지리 좌표계 지구는 기하학적으로 완전한 구가 아니므로 지구상에서 주어진 물체의 위치를 나타내기 위해서는 두 개의 좌표(위 도, 경도)와 지구 타원체에서의 고도가 필요하게 된다. 지구는 중심에서 적도까지의 반경과 극까지의 거리가 서로 다 론 찌그러진 타원체라고 볼 수 있으며 , 이러한 형태로 인하여 지 구 타원체라는 이름으로 불린다. 이 모델에서 적도평면은 완전 원으로 나타나고, 북극과 남극을 잇는 자오선은 장단축이 각각 a, b 인 타원의 모습을 나타낸다. 여기서 장축은 물론 지구의 적 도반경 (ae) 이 된다. 이와 같은 타원체의 이심률 (e) 과 관련된 매개 변수를 편평도
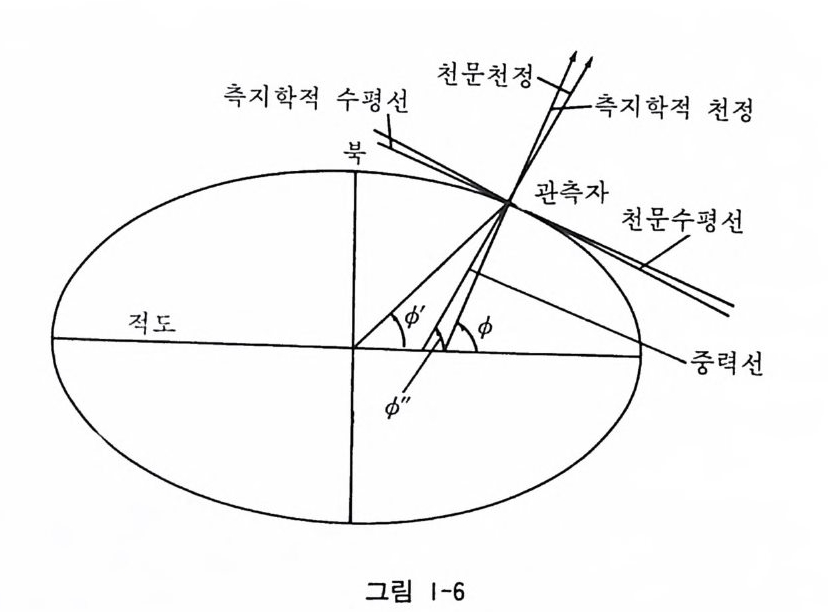
(fl a tt en i n g)라 하며, 일반적으로 I 로 표시하고 다음과 같이 정의 한다. I= (aa-b ) e2 =2/-/2 그립 1 - 4 와 그림 1-5 에 지금까지 설명한 지구 타원체의 일반적 인 형태 를 나타내었다. 이와 갇은 지구 타원체 모델에서는 그림 에서 보 듯 이 관 측 자의 위치를 나타내기 위하여 세 가지의 서로 다른 각을 정의하여 사용하며, 그 각들은 다음과 같은 형태로 정 의된다. ¢(지심 위도) : 지구 타원체의 평면에서의 점과 좌표계의 기하학적 중심을 연결한 선과 적도와의 각을 적도평면에서 수직으로 측정한 각 ¢( 측 지 위도) : 지구 타원체에 접하는 평면에 수직인 선과 적도평면 사이각을 적도 평면에서 수직으로 측정한 각 B ( 환산 위도) : 관측 지점을 통과하면서 적도에 수직인 선이 두영원 과 만나는 좌표계의 원점을 연결하였을 때 적도에서 수직으로 측정한 각 이와 같이 지리 좌표계는 지구 중심이 원점인 지구 중심 좌표 계 (ge ocentr i c coordin a te sys t e m ) 이 다. 여 기 서 기 준평 면은 적 도이 고 기준축은 적도평면과 그리니치 자오선의 단면이 교차된 선이 된다. 또한, 지구의 편평도가 불규칙적이기 때문에 보통 그림 1-6 에 표시된 바와 같이 세 가지의 위도를 정의하여 사용하는데, 이 중에서 ¢'와 ¢는 위에서 설명한 것과 갇고, 천문위도 #'는 다음과 같이 정의된다.
 z
z
 z
z
 적도
적도
¢(천문 위도) : 관측점에서 중력에 의해 형성된 중력선과 적도와의 각을 적도평면에서 수직으로 측정한 각 일반적으로 지구 표면에서 관측자의 위치를 나타내는 데 필요 한 위도는 ¢와 ¢”가 사용된다. 경도는 기준축으로부터 동쪽으로 측정된 각으로 정의되고 11E 로 표시한다. 또한, 지구 타원체로부 터 관측자까지의 높이룰 관측자 고도라 하고 H 로 나타낸다. 이 경우 지심 위도에서 측지 위도로의 변환은 ¢=tan -1[ta n ¢'/(1-/) 기 1-2 의 형태로 나타나며, 역으로 ¢'=tan [ (l-/) 2t:a n 싸 1-3 의 관계도 성립한다.
표 1-4 지십 좌표계의 변수의 범위 변수 의미 범위 ¢ 적도에서 북쪽으로 (+)방향 一 90 °< ¢< 9 0° ¢' 적도에서 북쪽으로 ( + )방향 —9 0° < ¢'< 9 0° AE 북극에서 내려다볼 때 반시 계방향이 (―)방향 0~ 11E~3 60 H 기준 타원체 표면에서 바깥쪽으로 (+)방향 。 북극에서 내려다볼 때 반시계 방향이 (+)방향 Qh r~ o ~24 h r
l.2 시간계 시간계는 태양의 운동이나 지구 자전, 태양 주위를 도는 행성 의 운동과 지구에 대한 달의 운동과 관련된 것에 기초 를 두어 결 정된다. 여기서는 먼저 시간을 인식하는 기본 개념인 줄리언일 (Ju li an day, JD ) 과 그레 고리 안일 (Greg o ria n day) 을 소개 하고, 태 양의 운동과 관련된 세계시 (Univ e ria l tim e, UT), 지구의 자전을 근거 로 한 항성 시 (Sid e real tim e) , 그리 고 이 론적 시 간인 역 표시 (曆表時, Ep h emeris tim e, ET) 를 차례 로 설명 하도록 하겠다. 1. 2. 1 줄리언일과 그레고리안일 오늘날 시간의 흐름을 파악하는 데에는 두 가지의 전통적인 방 법이 사용되고 있다. 그 중 그레고리력 (Greg o ria n calendar) 은 365 일의 평년과 햇수가 4 로 나누어지는 경우 366 일이 되는 윤년 (lea p y ear) 으로 되어 있다. 이 경우 2 만 년 동안에 1 일 이내의 오차로 정확히 맞추기 위해서는 4 로 나누어지는 해 (예 : A. D. 16) 는 윤년, 100 으로 나누어지는 해 (예 : A. D. 400) 는 평년, 400 으로 나누어지는 해는 다시 윤년으로 정의를 해주어야 한다. 이처럼
그레고리력은 일상 생활에 사용하기는 편리하지만, 특정한 날로 부터 경과한 날수를 계산하기에는 적합하지 못하다. 이와 갇은 문제점 때문에 천문학과 천체역학에서는 그레고리안 일보다는 특별한 기준 시각을 기점으로 그 이후로 경과된 날 수 를 모두 합하여 계산된 줄리언일을 많이 사용한다. 줄리언일의 기준점 (e poch) 은 기원전 4713 년 1 월 1 일로 선택되었으며, 정오에 서 다음 정오까지를 1 일로 측정한다. 매일의 그레고리력에 대응 하는 줄리언일은 미국과 영국이 합작으로 매년 편찬하는 Amen·can Ep he meris and Nauti ca l Almanac 으로부터 얻을 수 있고, 식 1-4 를 이용하여 구할 수도 있다. JD =367 x ye ar— IN T((7 (ye ar+INT (month + 9) /12) ))/4 + INT (275 x month / 9) + D + 1721013 . 5 + UT/24 1-4 여기서 INT(X) 는 일반적인 프로그램 언어에서 많이 사용되 는 함수로 괄호 안의 결과값 X 를 소수점 이하를 버린 정수의 형 태로 나타내어 준다. 1.2.2 그리니치 시간각과 세계시 지구에서의 시간법은 태양의 위치에 그 기준을 두고 있다. 시 태 양시 (app a rent solar tim e) 는 태 양의 시 간각에 12 시 간을 더 한 것이므로 기준점은 한밤중의 0 시가 되며, 지방시의 정오(l ocal app a rent noon) 는 12 시가 된다. 그러나 지구 궤도의 이심률과 지 구의 적도면과 황도면과의 경사 때문에 시태양일 (a pp aren t solar da y)의 길이는 1 년 동안 일정하지 않다. 죽, 케플러의 제 2 법칙 에 의하면, 지구의 공전 속도는 근일점 (1 월 2 일경)에서 최대이 며, 원일점 (7 월 3 일경)에서 최소의 값을 가진다. 이러한 운동으
로 인하여 태양은 황도상을 원일접보다 근일점에서 더 빨리 동쪽 방향으로 운동한다. 따라서 이때 태양이 다시 남중 (u pp er t rans it)하려면 지구는 그만큼 더 큰 각을 돌아야 하므로, 시태양 일은 원일점에서보다 근일접에서 더 길게 나타나게 된다. 그 뿐 만 아니라, 태양은 황도 위에서 움직이고 있는 반면 시태양시는 천구의 적도를 따라 측정되므로, 천구의 적도에 평행한 태양의 동행(東行) 운동 성분만이 실제로 시태양시에 영향을 끼친다. 이 와 같이 변화하고 있는 태양시의 불편을 없애기 위하여 우리는 천구의 적도를 따라 실제 태양의 평균 각속도와 같은 각속도를 가지고 동쪽으로 운행하는 가상의 태양, 즉 평균태양 (mean sun) 울 가정 하고 이 것의 시 간각으로 평 균태 양시 (mean solar tim e) 를 정의한다. 이와 같은 평균태양일 (mean solar da y)은 자정으로부터 시작 되며, 그 길이는 항상 1/365.2564 년이다. 이때 시태양시와 평균 태 양시 사이 의 차를 균시 차 (均時差, eq u ati on of tim e) 라고 하 며, 균시차의 효과는 누적되어 나타나므로 평균태양은 진태양 (true sun) 을 앞서거나 뒤서거나 하여 최고 약 16 분까지 차이가 생기게 된다. 이제 위에서 정의된 항성시와 평균태양시를 서로 비교해 보도 록 하자. 지구가 공전 궤도를 따라 이동하는 동안 춘분점은 지구 의 자전으로 상부 자오선상으로 다시 되돌아 온다. 죽, l 항성 일 이 경과된다. 그러나 지구가 공전 궤도를 따라 360/3 部:::::: lo 롤 움 칙였으므로, 태양이 지방 자오선에 돌아오기까지는 이 각도만큼 더 자전해야 하며, 더 회전했을 때 비로소 1 평균태양일이 경과 된 것이 된다. 10 는 항성시로는 4 분에 해당하므로, 1 평균태양일 은 1 항성 일보다 약 4 분이 더 길게 나타난다. 1 항성일의 정확한 길이는 평균태양시의 단위로 23 시간 56 분
4.09 초이지만, 평균태양시는 지표상의 경도에 따라 다르다. 이러 한 시간법의 사용에서 곤란한 점을 해결하기 위해서 전세계에 24 개의 시간대를 설정하였다. 즉, 폭이 대략 15°( 죽, 1 시간)되는 각 경도대 내의 모든 지점은 동일한 표준시 (標準時, sta n dard tim e) 를 사용하도록 한 것이다. 각 시간대의 경계선은 최대한의 편의 에 따라 조정되어 있다(도시는 일반적으로 전체가 하나의 시간대에 속 하도 록 한다) . 기 준 시 간대 (refe r ence tim e zone) 는 경 도가 oo 인 영국의 그리니치에 중심을 두고 있는데, 이와 같은 그리니치의 표준시 를 그리 니 치 평 균시 (Greenwic h mean tim e) 또는 세 계 시 (Univ e rsal tim e, U. T. ) 라 하며 , 개 기 일식 과 갇은 천문 현상온 흔히 U. T. 로 나타낸다. 그러나 태양계에 있는 천체의 위치를 정확히 예측하려면, 일정 한 속도로 꾸준히 계속되는 시간의 기준이 필요하다. 일반적으로 지구는 달, 태양과 행성의 운동과 관련하여 섭동을 받기 때문에 자전 속도가 일정하지 않으므로, 지구의 자전에 기초를 둔 세계 시나 항성시보다 더 정확한 시간을 얻기 위하여, 역표시 (曆表時, Ep h emeris tim e, E. T.) 라 는 이 론적 인 시 간을 사용한다. 이 시 간 의 경우 기준점은 서기 1900 년 1 월 0 일 12 시를 1900 년 1 월 0.5 일 로 정의하고, 이때의 줄리언일은 2,415,020 일이 된다. 이러한 역 표시의 단위는 역표초를 사용하는데, 이것은 1 초가 1900 년의 태 양년의 1/31 , 556,925.97474 인 값으로 정의된다. 역표시가 만들어 질 당시에는 세계시와 역표시는 일치하였으나. 오늘날 이 시각 사이에는 약 60 초의 차이가 나고 있다. 위성의 궤도및 추적 자료의 입력과 출력에는 원자 시간 (TAI) 울 사용하는데, 원자 시간은 세슘 원자 시계로 측정하며 1958 년 1 월 1 일 0 시 0 분 0 초 세계시에 UT 와 같게 하였다. 이때 역표시 와의 차는 32.184 초이며 이후에도 역표시와 원자 시간의 차이는
항상 ET-TAI=32.184 초가 된다. 시간계를 정리하면 역표시는 달, 태양, 행성의 위치 계산에 사 용하고, 위성의 궤도와 추적 자료의 계산에는 원자 시간을 사용 하며, 일상 생활에는 세계시를 사용한다. 참고문헌 Allen, C. W., 1973, Astr o p hy s i c a l Qu anti ties , 3rd ed. (The At hl one : London). H. M. Nauti ca l Almanac Of fice , 1961 , Expla nato r y Supp le ment to the Astr o nomi ca l Ep he meri s and the Amen·can Ep he meri s and Nauti - cal Almanac (Her Maje s ty 's Sta t i on ery Of fice : London) . Smart , W. M., 1962, Text- B ook on Sp he n·cal Astr o nomy , 5th ed. (Cambrid g e Univ . Press : Cambrid g e ) . Woolard, E. W., and Clemence, G. E., 1966, Sp he ri ca l Astr o nomy (Academi c : New York) .
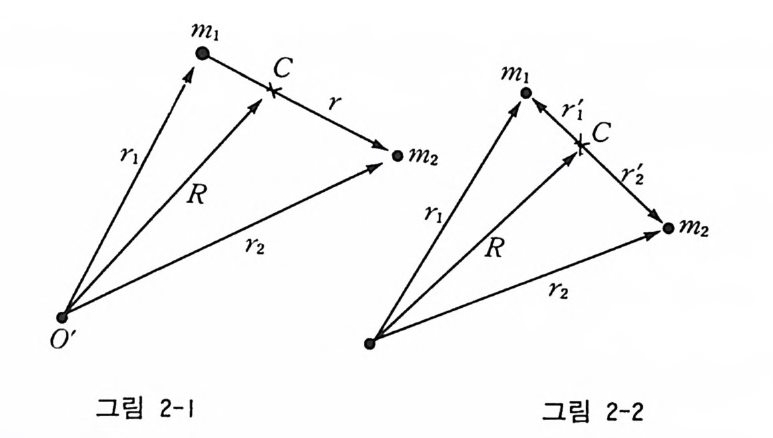
제 2 장 2 체 문제 2. 1 질량 중심 운동과 상대 운동 2. 1. 1 질량 중심 운동 이 절에서는 두 물체의 운동이 의부의 영향을 받지 않고 오로 지 그들 사이의 상호 인력에 의해서만 결정되는 경우에 대해 생 각해 보기로 하자. 여기서 두 물체가 모두 구대칭을 이루고 뉴턴 법칙을 따라 운동한다고 가정하면, 이들을 질점으로서 생각할 수 있다. · 그립 2-1 과 같이 관성계의 원접을 0 라고 하고 질량이 m1, m2 인 두 물체의 위치 벡터를 fi, fi 계의 질량 중심의 위치 벡터를 R 이라고 하자. 이때 r- =r-2 -r1- 이라고 정의하면, 뉴턴의 만유인력 법칙에 따라 m2 에 의해 m1 에 작용하는 힘은
Gmr 12m 2 U-r 과 갇은 형태로 나타나게 된다. 여기서 u--;. 는 7 방향의 단위 벡 터를 의미한다. 또한 반대로 m1 에 의해 1112 에 작용하는 힘은 앞 의 식과 비슷하게 _ Gmr I2m 2 U一r 로 나타내어진다. 이때, 이 계의 운동 방정식은 mm:... =+, Gmr1 3m 2 r- 2-1 m:.2... r2G=mr1 -m~2 r.,. 2-2 로 표시되며, 식 2-1 과 2-2 를 더하면 m1m...... +m2r.2..... =O 2-3 의 형태가 된다. 또한, 식 2-3 의 양변을 시간에 대해서 두 번 적 분하면 m1 fi+ m2r i= cit + ci 2-4 의 식이 얻어지며, 여기서 c1과 죽는 적분상수 벡터를 나타낸다. 이는 이 계에 의력이 작용하지 않는다면 2 체계의 총 선운동량은 보존된다는 것을 의미한다. 식 2-4 의 좌변은 질량 중심의 정의에 의해 (m1+m2)R 로도 나타낼 수 있으므로 질량 중심의 위치 벡터 R 은
 \•1n2
\•1n2
R= m)m fi1 ++mm2 홉 =ci''t+죠’ 2-5 가 되고, 이는 질량 중심이 등속 직선 운동함을 의미한다. 2.1.2 상대 운동 이 장에서는 질량 중심에 대한 m1 과 m2 의 상대적인 운동을 고려해 보기로 하자. 그림 2-2 와 갇이 질량 중심에 대한 m1 과 m2 의 위치 벡터를 각각 fj', fi'이라고 하면, ri=R +f i', ri=R +斤’로 표시된다. 여기서 r= fi-fj=丙'-斤’이고, R=O 이므로 m1r- 1=m1r-1.令., , m2r-. 2. =m1r_2.., 의 관계가 성립한다. 이 관계를 이용하면, 식 2-1 과 식 2-2 는 mm2mr~2츠, ; ==—+ GGmm11mm22((rr 丙丙33 '’―― mm 22--67
의 형태로 다시 나타낼 수 있다. 이때, m , 6'+m2 fi '= O 이므로 식 2-6 과 식 2-7 은 다시 1n1 f;i== —G m1 m2(I +릅) 릅 2-8 m 쵸= -G m1m2(1 +쁘m1 『 I) 홍1- , 2- 9 으로 나타낼 수 있다. 또한, r= m~2 r-{ = ~ m, 저 의 관계 식을 이용하면 질량 중심에 대한 두 질접 m, 과 m2 의 가속도를 다음과 같이 얻을 수 있다 . r_1. ,. = G(m r냐3 加) r' i' '=...., G(m~1+ 멍m 2)2 2 파ri 2-10 fi..' = G(mr ¥) fi ' =(Gml+n~22) 호r2; 2-11 따라서, 식 2-5 의 상수 行’과 죠’을 알고 있다면 식 2-10 과 식 2-11 을 풀어서 임의의 시간에서의 m1 과 m2 의 위치를 알아낼 수 있다. 그러나 우리는 상수 러’과 죠'울 알지 못하며, 또한 두 질 점의 절대 위치 역시 어떻게 결정할 방법이 없기 때문에, 이 문 제를 해결하기 위해서 한 물체에 대한 다른 물체의 상대 운동으 로 간주하여야 한다. 이제 2 체계의 원점에 m1 이 있다고 가정하자. 이때 m1 의 둘레 를 원운동하는 m2 의 상대적인 운동 방정식은 식 2-10 과 식 2-11 로부터 r-- . ►. =r-2.. -r1-. . = G(m냐r 쁘巨 2-12 mml+1mm22 .r: .:_=_ _ Gmr3 薄 2 r~ 2-13
의 형태로 나타낼 수 있다. 여기서 mm1l+mm2 2 를 환산 질량 (reduced mass) 이라고 정의하며, 위 식은 식 2-1, 식 2-2 에서 보 여지는 운동 방정식과 같은 모습을 갖는다. 2 체계에 있어서 상대 운동 방정식의 일반 해는 #과 E 의 벡터 곱으로도 얻어낼 수 있다. #과 E 의 벡터곱은 E x # = _ G ( m;t m2) ( r x 戶 ) X 7 2-14 와 같은 형태로 나타내며, 이것을 간단히 하면 lix f° =-G(m1+m2) 갑 P 2-15 과 갇은 식을 이끌어 낼 수 있다. 이때, 식 2-15 의 양변을 적분 하면 fix f= -G(m1+m2) r— C 2-16 가 되며, 여기서 C 는 적분상수 벡터를 의미한다. 식 2-16 에서 양변에 r. 을 연산하면 좌변은 7·(Ex #)=_ E·( 7x #)= ― h2 을 만족하므로, 이것으로부터 상대 궤도에 대한 다음과 같은 관계를 얻을 수 있다. h2=G(m1+m2) r+ r · C 2-17 여기서 위 식의 양변을 GM 으로 나누어 준 뒤 r 에 대해 정리해 주면, 이 운동 방정식의 일반 해는 r= 1+ (c/Gh (2m/G1 +(m m12 +) )mco2)s (0-0o) =_- 1+e cosP ( 0-0o) 2-18
P=G~ (m=)l2 +2 am2() 1-e2), e= G (m)c + 1122) 의 형태로 나타낼 수 있다. 여기서 武근 수직 단반경 (semi -l atu s rectu m ), a 는 장반경, e 는 이심률로 정의되고, 0 一 Bo 는 두 벡 터 7 과 C 사이의 각을 의미한다. 식 2-13 에 #룰 곱하여 적분하면 上2 mm1l+mm22 V• 2_ Gmr1 m2 = _ Gm2na1 22 =E 2-19 가 되어 이 식으로부터 계의 총에너지 E 를 알아낼 수 있다. 식 2-19 는 계의 총에너지가 보존됨을 나타내며, E 가 궤도의 일반적 인 특징을 결정하기 때문에 실질적으로 매우 중요한 의미를 갖는 다. 죽, E
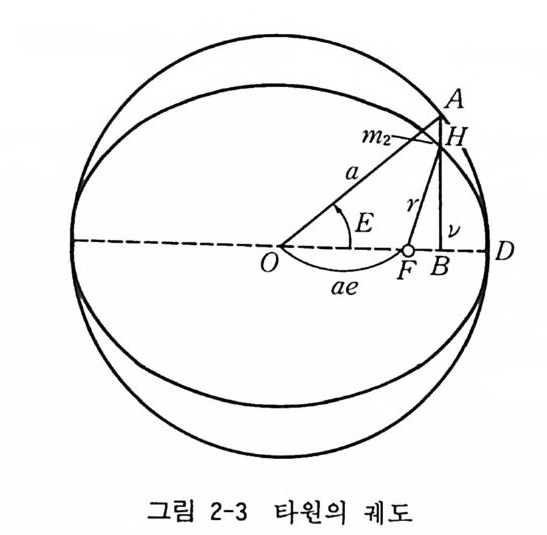 그립 2-3 타원의 궤도
그립 2-3 타원의 궤도
타원 궤도의 장반경을 반경으로 하는 보조원을 나타낸 것이다. 여기서 E 는 이심근점각, II 는 전근점각을 의미한다. 이심근점각 은 m 2 에서 타원의 장축에 내린 수선의 연장선과 보조원이 만나 는 교접의 동경 벡터가 장축과 이루는 사이각을 의미하며, 운동 방정식에 매개 변수로 사용된다. 그림 2-3 에서 r cos v=a cos E-ae 2-2 0 r sin v=a sin E-HA=a sin E~ 尹 2-21 의 관계가 얻어지며, 식 2-20 과 식 2-21 을 각각 제곱하여 더하면 r=a(I-e cos E) · 2-22 의 형태로 표시된다. 그러므로 시간의 함수인 E 를 알면 식 2-22 로부터 그 시간에 있어서의 m2 의 위치 r 을 쉽게 얻어낼 수 있다. 이제 시간 t의 함수인 E 를 찾기 위하여 기하학적 특성을 이용하여 보자. 우선
그림 2-3 으로부터 면면적적 BBDDAH =_aQ _=li二군 2-23 임을 알 수 있다. 이때, 면적 BDH= 면적 DEH ―면적 BFH 면적 BDA= 면적 DCA ―면적 BCA 로 나타낼 수 있고, 케플러 제 2 법칙에 의하여 면적 DFH= 강 na2 /i-=-군(t- T) 2-24 의 형태가 된다. 여기서 n 은 평균 궤도 운동 각속도, T 는 근지 점 통과 시각, t는 구하고자 하는 순간의 시각이다. 그러므로 위의 식들을 식 2-23 에 대입하여 정리하면 瓦 =2上 na2 /ti1 =ae22 E( ―t T_ -1T 군 ) s ―in 방 E군 co ssi nE 11 cos / 2-25 라는 식을 얻을 수 있다. 이 식에 다시 식 2-20 과 식 2-21 을 대 입하면 n( t- T) =E— e sin E=M 2-26 이 되며, 이 식을 케플러 방정식이라고 한다. 여기서 n(t- T) 로 정의되는 평균 근점각 M 은 한 천체가 타원 운동을 하면서 다른 천체 주위를 돌고 있을 때, 그 궤도상의 근지점으로부터 균 일한 각속도로 t 시간 동안 움직여 간 각거리를 의미한다.
2. 2.1 케플러 방정식의 해 앞 절에서 정의된 바와 같이 시간적으로 균일하게 변하는 평균 근접각 M은 쉽게 알 수 있지만 이것만으로 위성의 위치를 결정 할 수는 없다. 위성의 위치는 전근점각 l.l로 나타낼 수 있으므 로, 먼저 평균근점각 M 에서 이심근점각 E 를 구하고, 다시 E 에 서 I.I 를 구해내야만 한다. 이제 이러한 방식으로 케플러 방정식 의 해 를 구하는 방법에 대해서 생각해 보자. 케플러 방정식을 천체역학적으로 적용할 때 E 와 e 를 알고 있 다면 쉽게 M 을 구해낼 수 있다. 그러나 대부분의 경우에 있어 서, M 과 e 를 알고난 후 E 를 구해야 하며, 이때 E 를 직접 구할 방법은 없다. 따라서 E 를 구하기 위해서는 몇 가지 근사적 방법 을 사용해야 한다. E 를 구하기 위한 첫번째 단계는 근사 해를 찾는 것이다. e 가 작을 때 임의의 시각에서 E 는 M 과 그 값에 큰 차이가 없으므로 급수 전개에 의해 원하는 정확도의 E 를 얻어낼 수 있다. 먼저 첫번째 근사 해를 E。 ~M 이라고 가정하자. 그러면 두번째 근사 해는 다음과 같이 나타내어진다. E1=M+esin M 이룰 케플러의 방정식에 대입하면 E2=M+e sin E1=M+e sin ( M+e sin M) 이 되고, 이 식의 우변은 다시 M+e sin M cos(e sin M) +e cos M sin ( e sin M) 2-27 의 형태로 표시할 수 있다. 여기서 괄호 안의 항이 매우 작으므
로 이를 급수 전개시키면 cos(e sin M) =1— e2 s 2i굽1 M+ ··· sin ( e sin M) =e sin M 一 강 s 3i!군 M + … 으로 전개된다. 이를 식 2 - 27 에 대입하고 고차항을 제거하면 세 번째 근사해를 얻을 수 있다. E2=M+e sin M+ 으22 s i n 2M+… 2-28 그러므로 우리는 다음과 같이 e 의 멱급수로 원하는 정확도까지 E 를 전개할 수 있다. E=M+e sin M+ 룹2 s i n 2M+ 웅3 (3 sin 3M-sin M) +… 2-29 이러한 급수 해는 E=M+2 'k1=Jll ~(~]k(ke ) 2~30 의 형태로 정리하여 나타낼 수 있으며, 여기서 ]k 는 k 차의 Bessel 함수를 의 미 한다. 지금까지 케플러 방정식의 근사 해를 구하는 방법에 대해서 알 아보았는데, 실제의 위성 궤도 추적에서는 지금까지 설명한,방식 보다는 New ton -Raph son 방법 의 수치 해롤 사용한다. 죽 0 차 근사로서 Eo=M 이라고 놓으면 1 차 근사 E1 는 E1=Eo-E 。 -1—e es icn o sE Eo- 。 M 2-31
이 되고, i +l 차 근사 E i +I 는 E;+1=E.--E ;1-e-e s icn o sE E;-; M 2-32 의 형태로 나타나므로, E,+ 혼 : E:· 가 요구하는 정밀도가 될 때까 지 반복해서 계산하면 원하는 E 값을 얻어낼 수 있다. 보통 e 가 작은 경우에는 3~4 번이면 수령하고, e 가 1 에 가까운 경우에도 10 여 번의 반복 과정을 거치면 원하는 정밀도의 E 값을 얻게 된 다. 이밖에도 일리노이 대학의 Conwa y (1986) 는 Lag ue rre 방법을 이용하여, 이심률과 이심근접각을 바꾸어가며 50 만 번 시험한 결 과 Newt on -Rap h son 방법보다 더 빨리 수령함을 보였다. La g uerre 방법 은 Ei + 1=Ei f( Ei) 士J 14[ f' 5(Ef i() E ]2i) _ 5f ( Ei) f (Ei) 라는 식을 사용하는 것인데, 여기서 /(Ei) =Ei_ e sin E i一 M /'(E;) =l-e cos E; /(E;) =e sin E; Eo=MB+M+s~in e B=cos e_( 문 _e) sin e 를 나타낸다. 위에서 설명한 두 가지 방법을 사용하여 케플러 방정식을 풀 때 기억해 두어야 할 중요한 사실은 모든 각이 라디안으로 측정
된다는 것이다. 만약 E 와 M 을 각도로 나타내려면, 이들의 단위 룰 케플러 방정식에서 각도로 바꾸어 주어야 하며, e 도 각도로 바꾸어 나타내 야 한다. e 를 각도로 쓰면 edeg rees =견36 N0e°r adlans 2-3 3 의 형태로 나타내어지며, 이런 경우에 케플러 방정식은 Mo = Eo —e0s in E0 2-34 가 되고, Newt o n-Rap h son 방법 의 수치 해 방정 식은 E i+ 1o=El.0 EI.o 1_ -e°e s cion s E Ei .°-° — M 2-35 의 형태로서 표시된다. 2.3 타원 궤도 궤도 이심률이 O
 \ ` \/ x준 、 선
\ ` \/ x준 、 선
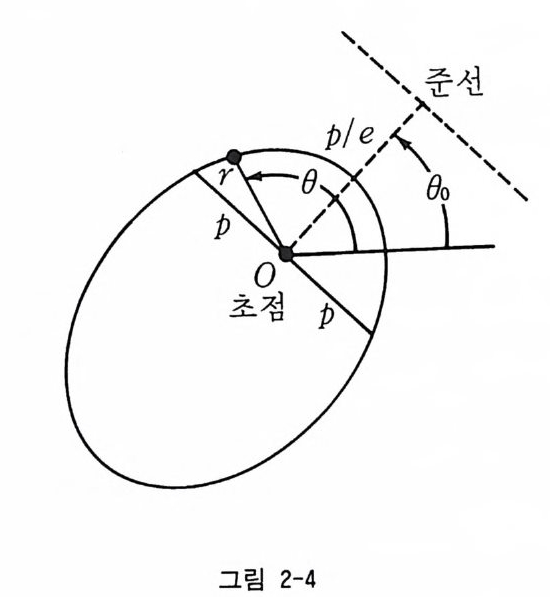
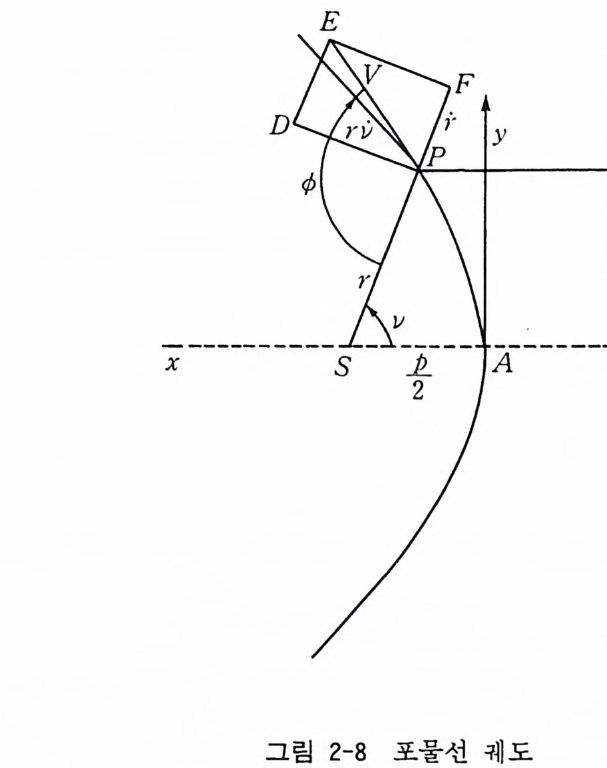
r= 1+epco s1.1 =- 1 a+ (elc-o강s) 1.1 2-36 의 형태로 표시된다. 2. 3. 1 타원 궤도상의 속도 타원 궤도 상의 점 P 에 위치하는 물체의 속도를 V 라 하면, 이 속도는 시선 성분 戶와 접선 성분 r ii로 분리하여 나타낼 수 있다. 죽, v2= r2+r2i i2 2-37 의 형태로서 표시된다. 여기서, 식 2-36 과 면적 속도 일정의 법
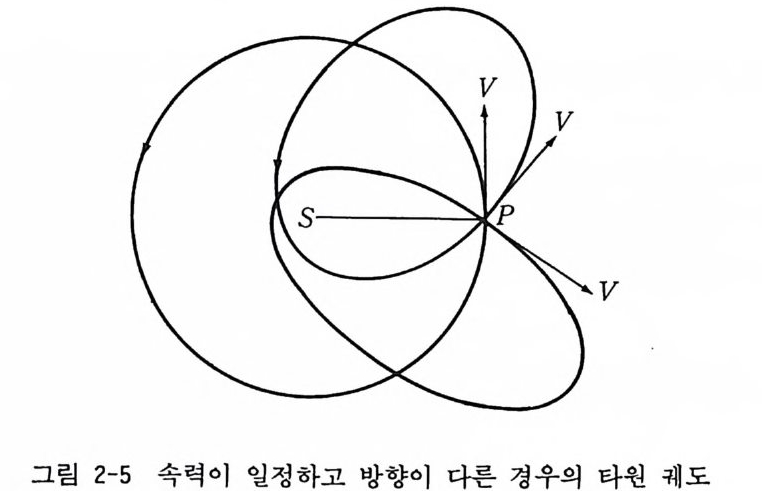
칙, 군Ji =h 의 관계에 의해 시선 속도는 r. = 一ph es.m 11 2-38 가 되고, 또한 식 2-36 에 의해 접선 속도는 rl i =—hr =—ph - (1 + e cos 11) 2-3 9 로 나타낼 수 있다. 따라서 , 식 2-38 와 식 2-39 를 식 2-37 에 대 입하여 정리하면 타원 궤도 상의 물체의 속도는 다음과 같은 형 태로 표시된다. v2= 信 )2(1+2e cos ).I+ e2) =信 )2[2+2e cos ).I-(1 - e2)] 2-40 이 식에 식 2-36 을 대입하면 식 2-40 은 다시 v2= 뿜―信 )2(1 ― e2) 2-41 h2 의 형태로 나타난다. 이때, G(m1+m2) =p =a (l― e2) 이므로, 이 관계에 의해 원점으로부터 거리 r 에서의 궤도 속도는 V 느 G (m1 + m2) (:—-¼) 2-42 이 된다. 식 2_42 에서 보면, 임의의 위치에서 속력 V 가 같으 면, 방향이 다른 경우에도 장반경 a 와 공전 주기는 언제나 일정 하게 유지되고, 단지 물체가 운동하는 타원 궤도의 모양만이 변 화하게 된다 (그립 2-5 참조) . 지금까지 설명한 방법 의에도, 타원 궤도 상의 속도 V 는 그
 v
v
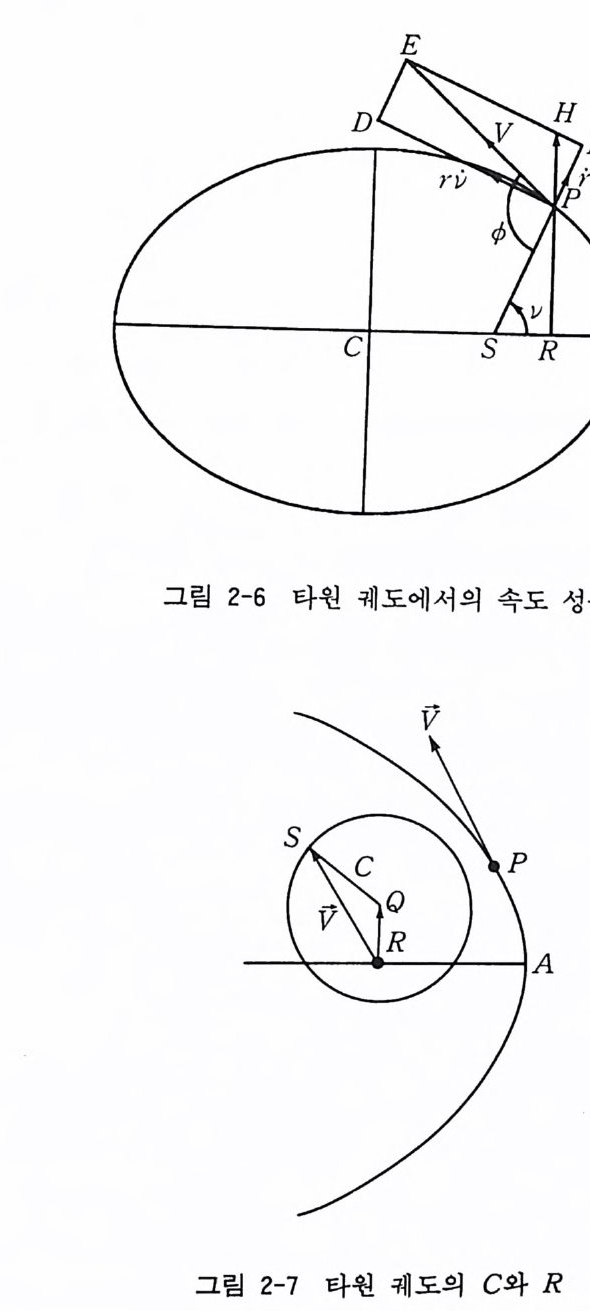
림 2-6 에서 보듯이 x 축에 수직인 성분 FH 와 PH+HE=v 가 되게 하는 HE 의 두 성분으로 분해할 수 있다. 먼저 HE=PD-FH =rii- r cot II 로 나타낼 수 있으므로, 식 2-38 과 식 2-39 를 사용하면 HE= 꿉=广 2-43 이 된다. 또한, PH=PF cosec 11= r cosec 11 로 나타낼 수 있으며, 여기에 식 2-38 을 사용하면 PH= 켓 =e~ 2-44 의 형태로 표시된다. 따라서, 동경 벡터에 수직이고, 크기는 일 정하지만 방향은 계속 변화하는 HE 와 장축에 수직이고, 크기와
 E
E
방향 모두 항상 일정한 PH 를 이용하여 타원 궤도 상을 움직이 는 물체의 속도를 나타낼 수 있다. 그립 2-7 에서 보듯이 타원 궤도 상의 임의의 점 P 에서의 속도 V 는 중심이 Q이고 반경이 C 인 호도그래프 (Hodo gra p h) 상의 점 S 에 해당되는 속도 벡터가 된다 (2 . 6 절에 자세히 설명되어 있 음). 만약 궤도가 원이라면 이심률이 0 이므로 원 궤도 속도는 식 2-42 에서 Ve= (G(m1+m2)/a)tI = h/p 2-45 로 표시가 된다. 또한, 근지점에서의 속도는 Vp =~ 2-46 로 주어지고, HE 와 PH 를 이용하면 아래와 같이 나타낼 수 있 다. Vi= HE+PH= C-R 2-46' 반면에, 원지점에서의 속도는 VA= ✓ G (mla+ m2) {i::} 2-47 로 주어지며, 이는 다시 VA=HE— PH = C+R 2-47 ' 의 형태로 나타낼 수 있다.
2.3.2 타원 궤도 상의 위치 앞 절에서는 이심근점각의 함수로서 동경 벡터를 나타내었다. 이 절에서는 E 에 대한 함수로서 쩌룹 나타내 보기로 하자. 식 2-20 과 식 2-21 로부터 a cos E=ae+ r cos v 2- 4 8 의 관계를 얻을 수 있다. 또한, 궤도의 국방정식이 r= la+ (el- ceo2s )1 .1 2-49 의 형태로 주어지므로, 이것을 대입하면 식 2-48 은 cosE= 1e++eCcoOsS 1I1 I 로 나타낼 수 있다. 이 식으로부터 1— cos E (l_1e+) e(1 C—O Sc oIIs 기 l+cos E (1+ 1e+)e (C1O+Sc oIIs 11) 의 관계를 얻어낼 수 있으며, 이 두 식을 서로 나누어 주면 tan 2 (?)=(昌) tan 2 (f) 의 형태가 된다. 이것을 다시 J/에 대해 정리하면 tan (낍 =We tan 信) 2-50 라는 식이 얻어진다. 이 식에서 알 수 있듯이 이십근점각 E 로부
터 전근점각 I.I가 유일하게 정해지므로, E (t)가 구해지면, I.I(t) 도 쉽게 구할 수 있게 되고, 따라서 E 와 I.I는 동일한 상한의 값 울 갖게 된다. 1.1 =E=M=0° 에서 1.1 =E=M=l80 까지인 1 상한 과 2 상한의 범위에서는 v>E>M 인 값을 갖고, 1.1 =E=M= 180° 에서 1.1 =E=M=360 까지인 3 상한과 4 상한의 범위에서는 I.I
 E
E
으로 나타낼 수 있으며, 만약 이 물체가 반경 ro 인 원 궤도 위를 움직인다고 가정하면, 이때의 속도는 vc= 『福:二 2-54 으로 표시할 수 있다. 따라서 이 물체에 v= 『京詞二 2-55 r 。 의 속도를 가해 주면 원 궤도를 벗어나 포물선 궤도를 따라 움직 이게 된다. 위 식은 식 2-42 에서 반장경 a 가 무한대일 때의 속
도와 같은 형태이므로 이 때의 속도를 탈출 속도로 정의할 수 있 다. 식 2 - 51 과 면적 속도 일정의 법칙에 의하면 訂 sec4( 품)=詞言~q 또는 sec 信 )dv= _!JQ (q ~d t 인 관계가 성립하고, 이를 시간에 대해 적분하면 ~(t -T)= t an( 움)+½t an 情) 2-56 라는 식을 얻을 수 있다. 여기서 T 는 근일점 (또는 근지점) 통과 시 각을 나타낸다. 또한 식 2-58 을 tan (웅)에 대 하여 풀면 이 순 간의 동경 벡터는 r=q s ec2 (f)=q[l + t an 情)] 2-57 가 됨을 알 수 있다. 2.5 쌍곡선 궤도 어떤 물체의 에너지가 E>O 이고, 궤도 이심률이 e>l 일 때, 이 물체는 쌍곡선 궤도를 따라 운동하게 된다. 쌍곡선 궤도는 타 원 궤도와 대칭적인 성질을 가지며, a
거리를 나타낸다. 따라서 타원 궤도의 방정식에서 a-+ - a(a< 0) 로 변화시키면 그 쌍곡선 궤도의 방정식이 얻어진다. 죽 식 2-18 에서 p= (-a) (e 드 1) 가 되며, 이때의 쌍곡선 궤도의 방정 식은 r= (-l+a)e ( ceo2s -/l.I ) 2-5 8 의 형태로 나타난다. 쌍곡선의 경우 면적 적분은 r2 ii =h= /jiG(m!”이 =J G(ml+ 마 (-a) (e. 2-59 의 형태가 되며, 타원의 경우에서와 같이 식 2-58 와 식 2-59 를 사용하면 속도는 V2=G(m1+m2)[f+ (]a)] 2-60 로 주어전다. 또한 타원에서와 마찬가지로 쌍곡선에서도 속도를 h/ p와 eh/p 의 두 성분으로 분리할 수 . 있다. 이 경우 근지점(또는 근일점)에 서의 속도는 식 2-46 에서 Vp = ✓ G(?」 :六 ;l) =꿉+뿐 2-61 가 되며, 식 2-60 의 속도는 r2+r2 Ji 2=G(m1+m2)[ 누了듦] 2-62 로 나타낼 수 있다. 위 식에 식 2-59 로부터 얻은 j룰 대입하면 식 2-62 는
f2 = 답~{[(-a) +r] 드 (— a)2e2} 2-63 의 형태로 간단히 표시된다. 여기서, n2= G( 广 :.)?2) 을 의미 한다. 이처럼 쌍곡선 궤도의 방정식들은 타원 궤도의 것들과 매우 유 사한 형태를 가지며, 경우에 따라 계산의 편의를 위해 매개 변수 가 사용되기도 한다. 타원의 이심근점각 E 와 비슷하게 매개 변 수 F 를 정의하고, 타원 궤도 방정식 2 - 22 에서 E 一 iF 로, a --- ► _a 로 바꾸면 쌍곡선 궤도 방정식은 r=a(l-e cos E) =a(l -e cos iF) = (— a) (e cosh F— 1 ) 2-64 의 형태로 나타낼 수 있다. 위 식을 미분하면 dr=(— a) esin h FdF 의 식이 얻어지며, 이것은 식 2-63 을 이용하여 정리하면 ndt= (e cosh F-I) dF 2-65 로 간단히 나타낼 수 있다. 이 식을 적분하면 아래와 같이 케플 러 방정식과 비슷한 형태의 식을 얻어낼 수 있다. n( t— T) =e sin h F— F =M 2-66 식 2-66 의 해는 타원 운동에서 케플러의 방정식을 풀 때와 비 슷한 방법으로 구할 수 있다. 먼저 F 의 근사값을 구하기 위해 Newt o n-Raph son 방법을 사용하기로 하자. 초기 근사를 Fo=M 이라고 가정하면, i +l 차의 근사값 Fi +l 는 Fi+ 1=Fi_ e sein ch o Fsh.- F-F.-.—- —1 M 2-67 의 형태로 주어지며, Fi 십::::: E 가 요구하는 정밀도가 될 때까지
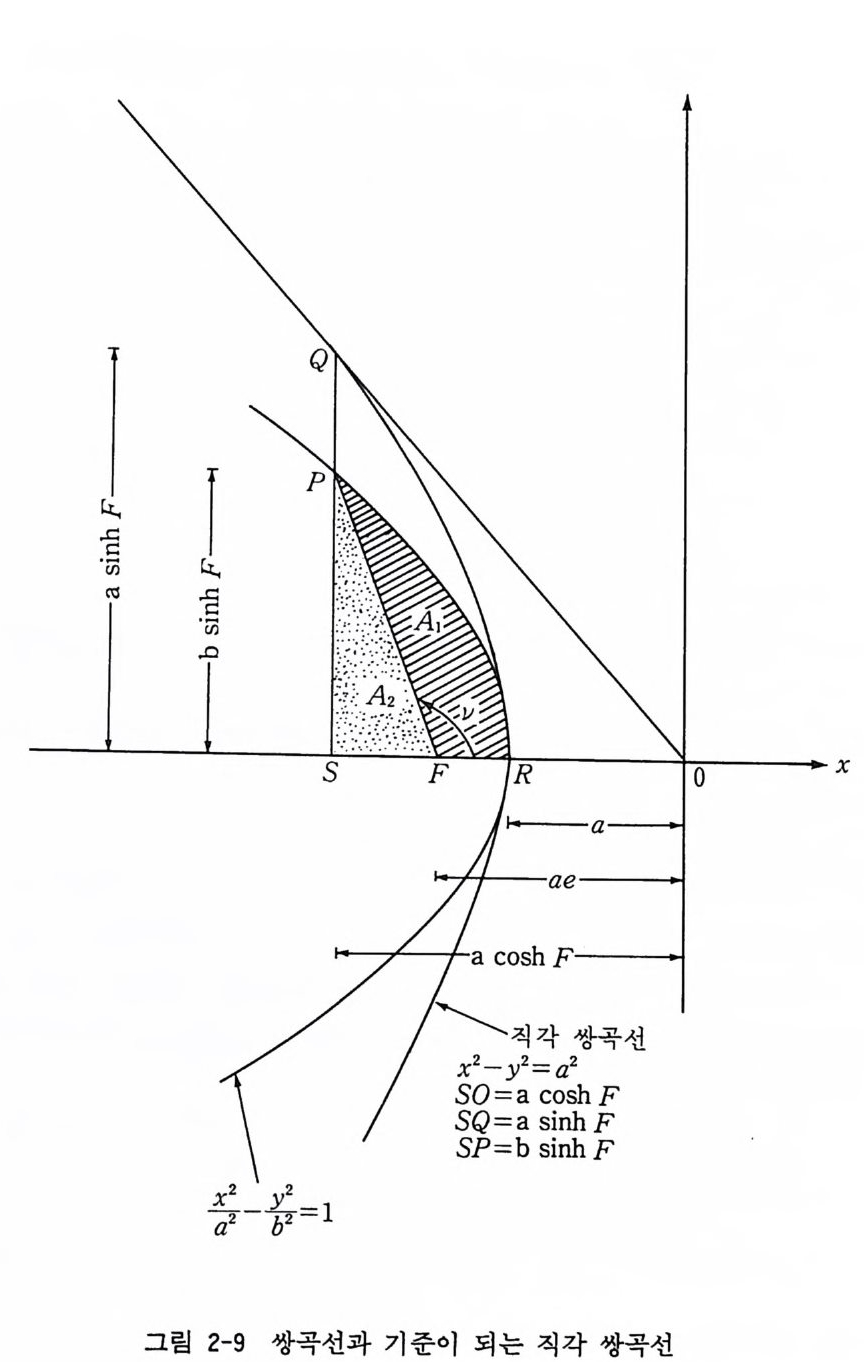
반복하여 계산하면 원하는 F의 근사값을 얻을 수 있다. 보통 5~8 번의 반복 과정을 거치면 수렴하게 되는데, 타원 궤도의 경 우보다 수령 속도가 아주 느리다. 이제 쌍곡선 궤도를 기하학적인 방법으로 설명하여 보기로 하 자. 쌍곡선 궤도는 보조 쌍곡선으로 점근선이 y=土 x 인 직각 쌍 곡선 (Eq u il at e r al hyp e rbola) 을 도입 하여 문제 를 풀게 된다 (그립 2-9). 이 경우 F 의 위치는 질량이 큰 천체 m1 이 되고, P 의 위 치에 질량이 작은 천체 m2 가 있다고 가정한다. 또한, P 에서 장 축방향인 x 축에 수선을 내려 만나는 점을 S, 보조 쌍곡선과 만 나는 점을 Q라고 하자. 그림 2-9 에서 점 R 을 근지점의 위치라고 하면, 쌍곡선의 이심 근점각에 해당하는 F 는 다음과 같이 정의하게 된다. F= 면—12적 ( _QaO) 2R 2-68 이 경우 케플러 제 2 법칙에 의해 m2 천체의 동경 벡터가 그리고 지나간 면적 A1 은 6. PSF 의 면적을 A2 라 하면 A1= 면적 PSR— A 2 2-68' 로 나타내어지며, 여기서 b=(-a)~ A2 건[(― a)cosh F-(- a) e]b sin h F 2-68 면적 PSR= (—b a ) (면적 QS R) 면적 Q SR= 면적 Q SO- 면적 QO R
 1,
1,
=1� N( a)coshF ()asihFn- ��N 1a)2Ft��
PSR= �N ~(cashFsin hFF) 268-'" x� �Ĭ� 1���\��. t� �Ĭ|� tǩ�X��� A1 D� �� �Ȭ�дX��� �t� (a )b A1=~(coshFsnihF-F) _�[ ( a ) coshF (-a) e]b sinh F�=N?-2-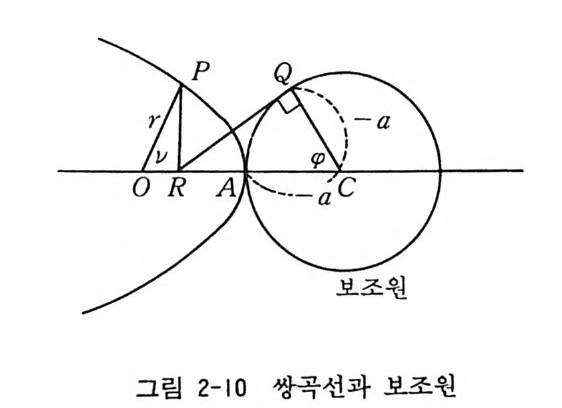 그림 2-10 쌍곡선과 보조원
그림 2-10 쌍곡선과 보조원
(C一R a2) 2 —R—bP22 _ = l 을사용하여 rs i nv= 回 =(-a): 广 = (一 a)/ 군二 1 t an
의 관계가 성립함을 알 수 있다. 따라서, 平와 F 사이에는 rp= sin - 1 (tan h F) =gd F 2-71 의 관계가 성립한다고 할 수 있으며, 여기서 g dF 는 Gudermann 함수로 정의된다. 이와 같이 쌍곡선 함수를 삼각 함수의 형태로 표시하여 사용할 수 있으며, 그 결과를 표 2-1 에 나타냈다. 식 2 구 1 의 관계를 이용하면 식 2-50 은 쌍곡선 궤도에서 t an 꿉=亨t an 哈=:耳t anh f =A 汀t an 꾼 2-72 의 형태로 나타나며, 식 2-50 과 식 2-72 를 비교하여 보면 타원 궤도의 이심근점각은 q;=g dF 에 해당됨을 알 수 있다.
표 2-1 F 와 Gudennann 함수 F gd F F gd F 。 0° 0.8 41 . 61° 0.1 5.72° 0.9 45.75° 0.2 11. 38 ° 1.0 49.60° 0.3 16.94° 1.5 64.84° 0.4 22.33° 2.0 74. 58 ° 0.5 27.52° 3.0 84. 30 ° 0.6 32.48° 4.0 87. 90 ° 0.7 37.18° CO 90°
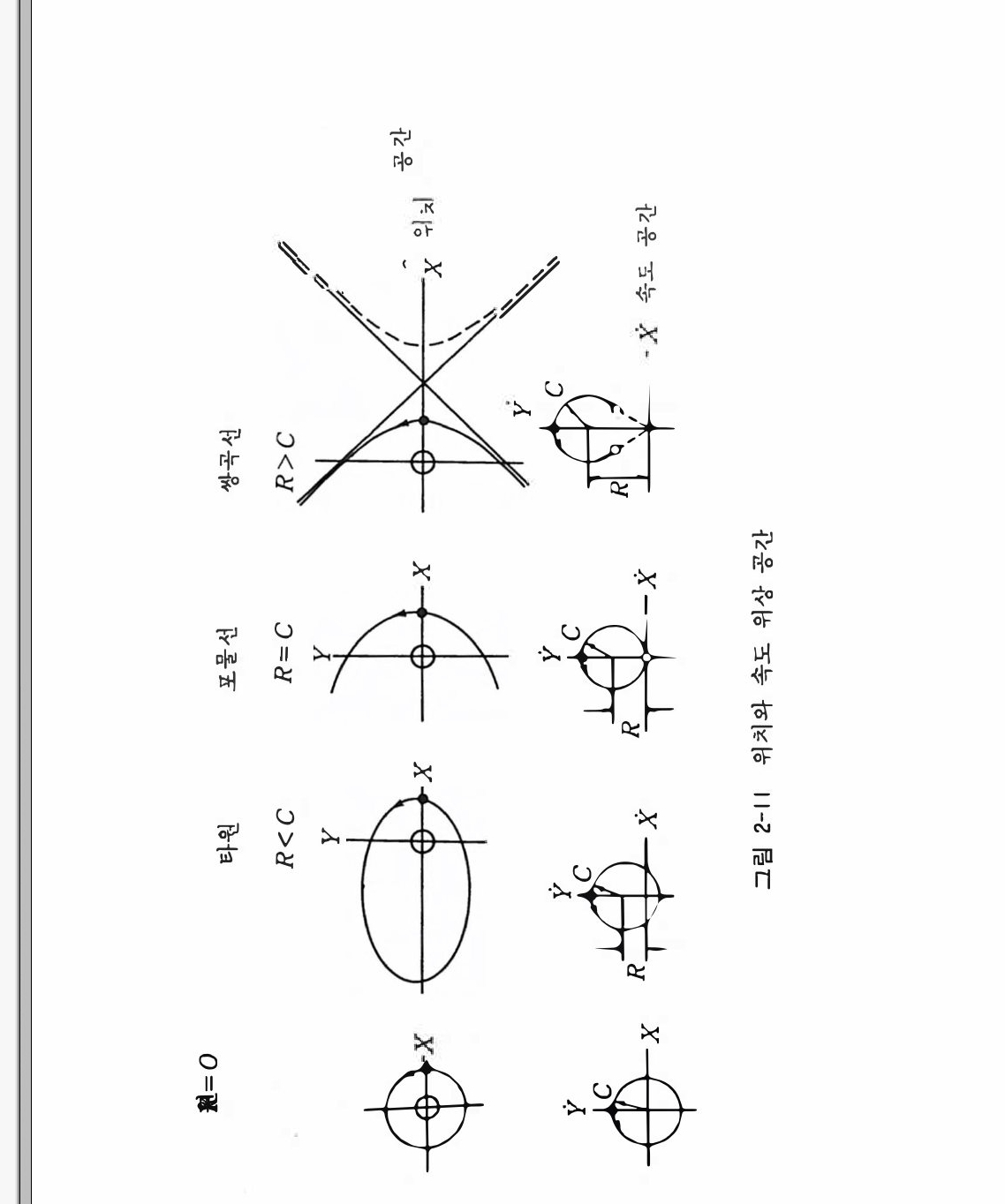
2.6 호도그래프 일정한 궤도를 따라 움직이는 위성의 위치 벡터는 앞에서 설명 한 것과 같이 시간이 변함에 따라 원추 곡선을 그리게 된다. 또 한, 위성의 위치가 변화함에 따라 위성의 속도 역시 변화하게 되 는데, 이런 속도 벡터의 변화는 시간에 따라 속도 위상 공간에서 원의 형태로 나타나게 되며, 이 원을 호도그래프 (Hodo gra p h) 라 고부른다. 이 절에서는 X-Y 평면으로 표시되는 원추 곡선을 따라 움직이 는 위성의 속도 벡터가 X 와 Y 의 속도 위상 공간에서 어떻게 변화되는가를 살펴보기로 하자(그림 2-11 참조). 속도 위상 공간에 나타나는 위성의 속도는 HE 와 PH 의 두 성 분으로 분리할 수 있다. 이 경우 EH 는 C, PH 는 R 이라고 정의 가 되며, 속도 위상 공간에서 나타나는 원의 반경은 C 가 된다. 이때, 원의 중심은 Y 축 위로 R 만큼 떨어전 곳에 위치하며, 근 지점은 Y 축, 원지점은 _ Y 축 위에 존재한다. 위성이 지구 둘 레를 회전함에 따라 위성의 속도 벡터 역시 호도그래프 상에서 반시계 방향으로 회전을 하며, 그 형태는 (X-R)+Y2=C2 로 표시할 수 있다. 따라서, 원점에서 원까지의 거리가 그 위치에서 의 속도의 크기를 나타내게 된다. 원 궤도의 경우 C=~a , R=O 이 되고, Y 축에서 반시계 방향으로 회전한다. 포불선 궤도의 경우에는 R=C= 广 E: 元 가 되므로, 속도 위상 원은 X 축에 접하게 되고, 근지점의 위치는 Y 축 위에 존재한다. 포물선 궤도에 있어서 속
 58
58
도의 크기는 Vp =C+R= 〈떴貫굶:굶 3 으로 표시되며, 이 속 도가 지구의 인력권으로부터의 탈출 속도로 정의된다. 호도그래 프 상에서 위성의 속도 벡터는 반시계 방향으로 회전하며, 원점 에서 속도는 0, 위치는 무한대인 특이점이 나타난다. 쌍곡선 궤도에서는 호도그래프 상에서 위성의 속도 성분이 C= 广, R=e 訂), R>C 인 값을 갖는다. 이 경우 근지점은 Y 축 위에 존재하고, 속도의 크기는 Vp =C+R= ✓ G(?」 :麟 ;l) 로 나타난다. 쌍곡선 궤도에도 포물선궤도의 경우와 유사한 특이 점이 존재하는데, 이 경우에는 무한대 위치에서의 속도가 0 이 아 니라 v. . =『門三尸 의 값을 가지므로 아보다 작은 속도를 가지는 범위에서 특이점들 이 광범위하게 나타난다. 보통 이런 특이접둘이 존재하는 위치는 원점에 인접한 곳에 국한되며, 따라서 호도그래프의 형태는 한쪽 호가 없는 불완전한 원의 형태를 나타내게 된다.
2.7 ��� ��ٳX� �� ��� )����X� t�|� ������� M �� �\� xԬ��� ��X� ��
�\� \�X����� ���. ��� )����@� E-M=esin E X� ����<�\� �� � ���, E_M@� �� \0 �h��\E��� ����0 �2 7[�t��\� xԬ��� ��\� ��`� � ~ bk�s i��. �, �.. iens E=2 n Mk k =XI� ���\� ��м�� � ���. ��0�� bk =\0 esni E sin kM M 7 fdJo = �e i sEn cos kMj:=0+�1:0cos kM d (E-_ 1 ,rk ME) -cko=e� kMs dM =�1:1cros(� ]k( sin E) dE mke) t���\�, ��� )����X� tՔ� .. 1 E=M+2고이심근점각 E에 대한 타원 방정식은 r=a(1- e cos E) 이므 로
—ar = I-ec1o sE =—a8ME =1,._ +'2 f~O:O 1 ]k (ke)cos kM 2-74 이 된다 . .'.t._.C,_ , 근점각에 대한 타원 방정식은 cos l/= -¼ [(1군 ):-1]= -e+ 2(1;장) 훔 Jk ( ke)cos kM 2-7 5 의 형태로 나타낼 수 있으며, 케플러 방정식을 e 에 대해 편미분 하면 —aaMe = -sin E 가된다. 타원 방정식에 식 2-73 을 e 에 대해 편미분한 값을 대입하면 ~a sin E=a8 %Ef si n E= 言8E =2 1OJO 1 J/( ke) sin kM 2-76 의 형태가 되며, 이 식을 사용하면 sin 11= 으r ~ s i n E=2~ ki0=!0I ]k'(ke)sin kM 2-77 이 된다. 다음에 식 2-76 의 양변을 M 에 대해 적분하면 f7si n E dM= f운 s i n E(1-e cos E)dE=/sin E dE=— cos E+C=-2 jJI t Jk'( ke)cos kM 이 되고, cos E의 평균값이 c= 응이므로 cos E= -충 +2 훔*J /(ke)cos kM 이 된다. 따라서, ~=1— e cos E=l+f -2e 홈也 '(ke)cos kM 의 형태로 나타낼 수 있다. 마지막으로 sin E= 一1e (E_M) =—2e k2°=° l —k1 ]k( ke)sin kM 이 된다. 2.8 o0 _R0 2.8. 1 I 와 g의 급수전개 이 절에서는 위성의 궤도에서 위치와 시간 사이의 몇 가지 관 계에 대해 알아보자. 일반적으로 위성의 운동 방정식은 #=_ G(mrf m 2) r=-u7 2-78 의 형태로 나타나고, 여기서
u= G(m1r +3 m2) 으로 정의된다. 또한, 궤도를 따라 운동하는 위성의 위치 벡터는 시간의 함수 로 나타나므로 t =O 일 때의 위치를 丙라 하고, 임의의 시간 t에 서의 위치를 7 이라 하면, 위성의 위치 7 은 r + r-;+ r-;t +강希t 2 」 r-; (3)t 3+ 2-79 의 형태로 급수전개해 나타낼 수있다. t =O 인 경우에 위성의 운동 방정식은 r-;= -Uor-; 의 형태로 표시되므로, 식 2-79 를 미분하면 껑 3)= _ a 。r~― Uor-; 럼 4)= (-ii。+과) 芬 _2a 。范 r~(5 )= (_ u&3)+4Uoa 。) r~-(3 ii。_ u 젊 r-; 2-80 의 식들을 얻을 수 있다. 위 식들에서 # 이상의 항을 제거하면 r=J r- ;+g r ~ 2-81 로 표시되는데, 여기서 I 와 g는 각각 f =l-½uo t 2- 강 a 。t 3_ 감 (u 。_과) t4… g=t-강 Uo t 3_ 꿉 a 。t仁갑 (3u 。 -u 젊 ts· ••
으로 정의된다. 이제 I 와 g에서 U 이상의 항을 제거하기 위해 P 와 q룰 다음 과 같이 정의하자. ?,2 p = TI d(d 군t ) 2-82 r%=T1 d2d( t군2 ) 2-8 3 따라서, p, q는 각각 p=판= 7?? 2-84 q=: V2r- 2r 2u 2-85 의 형태로 나타낼 수 있으며, 이들의 시간에 대한 미분 역시 a= ―표r4 소d-t =-_ 표r4上 2- r d(d 규t ) 2-86 ?= 21r2 d2d( t군2 ) _上r3 d(d 규t ) 뿌dt 2-87 q = 」 T d2);:) 훔+수 말3 2) 2-88 과 같이 얻을 수 있다. 여기에 식 2-82 와 식 2-83 을 이용하면 u=-3uP 2-89 ?=q_ 2p 2 2-90 q= -(u p +Z p q) 2-91 가된다. 또한, u= —3( up + up ) 2-92
이므로, 여기에 식 2-86 과 식 2-87 을 대입하면 a=— 3 [u(q— 2P2)-3up2 ] 2-93 의 형태로 표시되고, 이룰 이용하면 f와 g의 값을 /=l-½uo t 2+½UoPo t도갑 (3uo q。 -l5uoP~+ u~) t4+ … 2-94 g= t -tl uo t 3+ tl uoPo t 4+ 國l (9uo q。 -45uoP~+ u~) t5+ … 2-95 으로 나타낼 수 있다. 만약, ro 과 f o 를 안다면 식 2-84 와 식 2-85 로부터 Po 와 q o 를 계산한 후, 식 2-91 과 식 2-92 에 의해 다음과 같이 위치 벡터를 얻을 수 있다. r=/r-;+g ~ 2-96 이 식에서 초기값인 r~와 r-;가 일정하므로 식 2-96 을 시간에 대 해 미분하면 그 순간에서의 위성의 속도 벡터 역시 I 와 g를 이 용하여 #=jr-;+gr-; 2-97 의 형태로서 나타낼 수 있다. 2. 8. 2 f와 g 급수전개의 해석적 표현 이 절에서는 앞에서 설명한 I 와 g 급수전개를 궤도 평면 좌표 계 (orbit pla ne coordin a te sys t e m ) 에 대 해 적 용해 보기 로 하자. 궤도 평면 좌표계는 인공위성이 운동하는 궤도면을 기준면으로 하여 나타낸 것으로 근지점 방향을 Xw, 근지점과 수직한 방향을
Yw, 궤도면과 수직한 방향을 %로 잡아 준 일종의 직각 좌표계 이다. 이 좌표계에서는 각 축 방향의 단위 벡터를 P, Q, w 로 정의하며, 다른 좌표계에 비해 계산울 하는데 큰 이점이 있고, 궤도 요소의 사용이 없이도 직접적인 방향의 표시가 가능하기 때 문에 현재 인공위성 궤도의 표시에 많이 사용된다. 이제 식 2-96 을 궤도 평면 좌표계에 대해서 다시 쓰면 위성의 위치 벡터는 rw =frwo + g fwo 2-98 의 형태로 표시할 수 있으며, 여기에 t WO 를 벡터곱하면 rw X fwo =frw o X 亢 WO 2-99 가 된다. 이때, YwoX fwo - 2 위성의 각운동량이므로 hW 로 대 치 하여 쓰면 식 2-99 는 YwX fw o=J hW =f /µp W 2-1 0 0 의 형태로 다시 나타낼 수 있다. 이것을 각각의 성분에 대해서 간단히 하면 (XwYwo-YwXwo) W=f. /µp W 의 관계가 성립하므로 f는 /=g ~ 2-101 의 형태로 표시된다. 마찬가지로 계수 g도 식 2 - 98 에 rwo 를 벡 터곱하면 아래와 같은 형태로 나타낼 수 있다. g=a ~ 2-102 궤도 평면 좌표계에서 임의의 시각에서의 위치 7 은 그림 2-3 과
같이 Xw 와 Yw 의 성분으로 분해할 수 있다. 죽, Xw= r COS !)=a (cos E— e) Yw = r sin !)= a .fi二 sin E 의 형태로 표시되고, 이를 시간에 대해 미분하면 仁=― a £sin E 2-103 Yw = aE /i 亡 군 cos E 2-104 가 된다. 이때, E=~r /v 교a 의 관계가 성립하므로 江와 y요는 iw =- #r~ sin £ 2-105 y w = 무r cosE 2-106 의 형태로 보다 간단히 나타낼 수 있다. 이제 위의 결과를 식 2 - 101 과 식 2-102 에 대 입 하면 I 와 g는 f= a(cos E ― e) 隔 cors oEM 。 + a 扇 s i n Esin E 。 2-107 g= a2 JI구 (cos E 。 -e)s i n E扇-a2 /i구 (cos E-e)sin E 。 2-108 의 형태로 표시되고, 이것은 다시 f= 1— ~[ 1-cos (E-E 。)] 2-109 r。 g= r_ JG (ma3l1+2 m2) [(E_E 。) _s i n(E-E 。)] 2-110
로 간단히 표시된다. 따라서, 초기의 위치와 속도만 알면 I 와 g 값을 구할 수 있고, 임의의 시간에서의 위치 벡터 7 역시 결정 할수 있다. 이와 유사한 방법으로 임의의 시간의 속도 벡터 戶도 쉽게 결 정할 수 있다. 앞 철에서 설명한 바와 같이 미래(또는 과거)의 임의의 위치 벡터는 r=f r o+g r -; 2- 11 1 의 형태로 표시할 수 있고, 속도 벡터는 t=j?컹+g r-; 2-1 1 2 로 나타낼 수 있다. 여기서, j= ✓ G(ml+m2)a s i n(E-E 。) 2- 11 3 rr 。 g =7[cos(E-E 。) _ Ce cos(E-E 。) +Se s i n(E-E 。) ] 2-114 Se=e sin Eo, Ce=e cos E 。 의 관계가 성립하며, 이 관계를 통해 결국 속도 벡터 역시 결정 할수있다. 2. 8. 3 2 체 운동의 계산 알고리즘 앞에서 알아본 것과 갇이 I 와 g 급수 전개를 사용하면 기준점 의 위치와 속도를 알 때 임의의 시간에서의 속도와 위치를 산출 할 수 있다. 이 절에서는 이러한 계산 과정을 알아보기로 하자. 가장 먼저 해야 할 일은 다음의 식들로부터 기본적인 물리량들 울 얻는 것이다.
ri= r 。· r 。 2-115 D 。 7{ 。•T 戶。 2-116 VµJ 소ro ·µ 一r· 。 2-117 上a _rl 。 ___모µi 2-118 e2=(1 ― ?)2 나 D~ 2-119 P=r 。 (2_ 톱)― D~ 2-120 2 q― 2r 。 -D~ 2-121 여기서, µ=GmE B, Vo 는 초기 속도, a 는 궤도의 장반경, e 는 궤 도의 이심률을 의미하며, Do, P, q는 계산울 편리하게 하기 위 한 매개 변수들을 의미한다. 위성의 궤도가 타원인 경우는 CSee==ee c soisn E Eaa==l—{ - 느a 22--112223 D 。 라는 변수를 정의할 수 있으며, 여기서 E 는 이심근점각을 의미 한다. 또한, 미래에 위성이 나타날 시각은 M-Mo= U 감) k/µIa312 2-124 M —M o=2g - Cesin g c osg + Sesin 2 g • 2-125 의 형태로 나타낼 수 있으며, M 은 평균근점각, g =(E-E 사 /2 를 의미한다. 여기서 케풀러의 방정식을 g에 대해서 뉴턴의 근 사 방식으로 계산하면, 미래의 어느 시각에서의 위성의 위치와
속도를 구해낼 수 있다. 죽, gn +1=g n _ gn +lS+e2 sSine 2 S gi nn -gCn CeO sSi ng , gl 一n cGos( 1gn— 三2 了s1 i n( 2 Mgn_ ) M 。) 2-126 n=l, 2, 3, … 의 관계식에서 gn +1- gn ~€ 의 범위를 만족할 때까지 반복 계산하 여 나온 g의 값을 가지고 다음의 계산 과정을 수행해 가는 것이 . 다. C=a[l-cos(E-E 사 ] 2-127 S= /fa= s1 i n-—(rE 。 -E 。) 22--112298 C g= *(roS+DoC) 2-130 r=ro+(1- 문 )C+DoS 2-131 J=-rr그。 s 2~1 3 2 g= l-~Cr 2-133 위의 식들을 통해 f, g, j, g 등의 값을 얻을 수 있고, 이 값 둘을 식 2-111 과 식 2-112 에 대입해 줌으로써 우리가 구하고자 하는 시각 t에서의 위치 벡터 7 과 속도 벡터 戶롤 결정해 낼 수 있다.
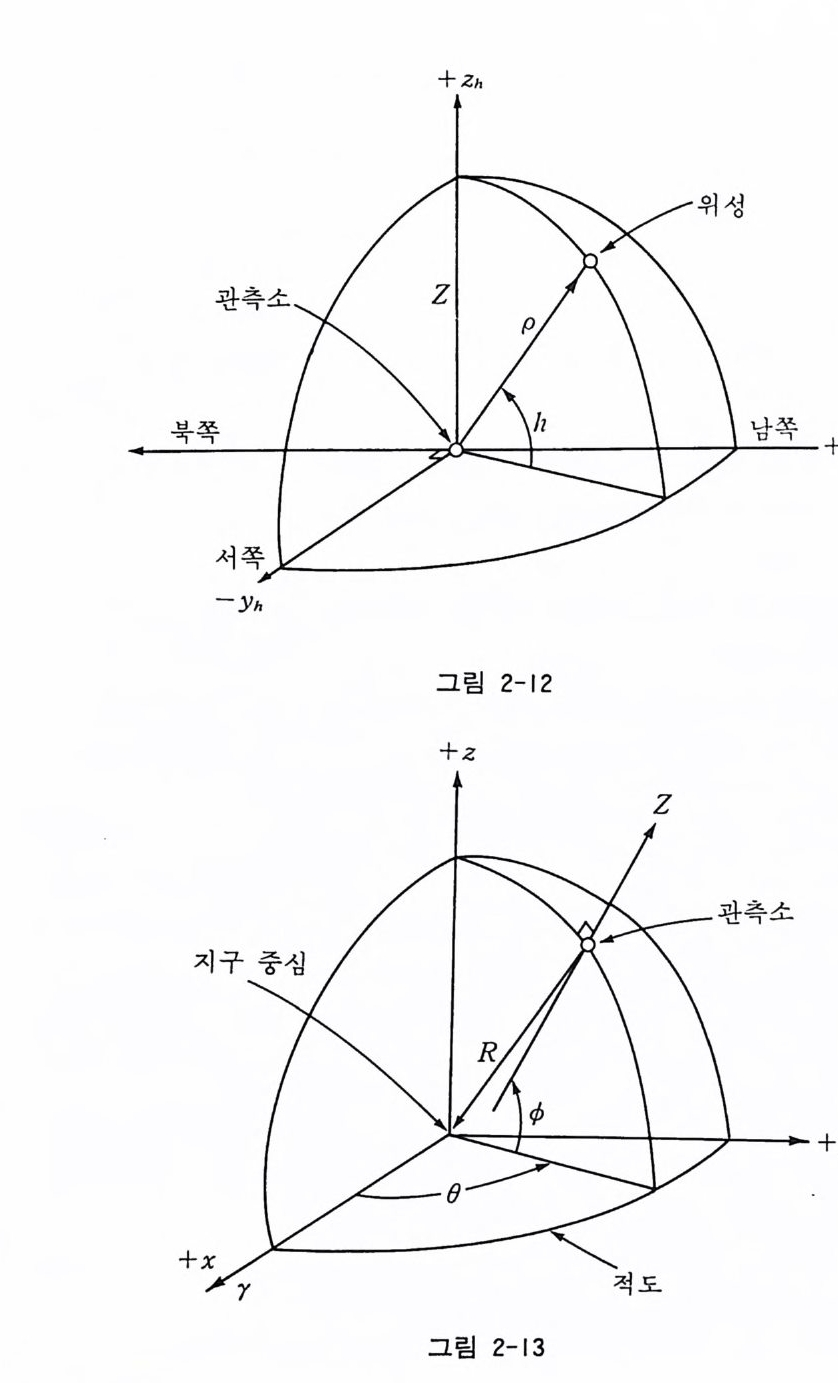
2.8.4 위성의 출몰 시각 인공위성의 제어 또는 송수신에 있어서 이미 궤도를 알고 있는 위성이 특정 지역에 출몰하는 시각을 알아내는 작업은 매우 중요 하다. 만약, 위성에 대한 궤도 요소와 추적 안테나의 지구상의 위치, 추적할 수 있는 위성에 대한 최소의 고도각 등이 주어진다 면, 이심근점각으로 된 위성의 출몰 시각을 산출해 낼 수 있다. 과거에 는 직접 미분 방정식을 푸는 축차 수치적분법으로 위성의 출몰 시각을 산출해 내었으나, 현재는 방정식을 직접 풀 수 있기 때문에 축차 수치적분법보다 25 배 정도 빠르게 출몰 시각을 산출 해낼 수 있다. 이 절에서는 위성의 출몰 시각을 결정하는 방법에 대하여 생각 해 보기로 하자. 그림 2-12 와 같은 관측p-자~r· Z -중= 심s i n좌 h표 계에서 위성의 고도는 2-134 의 형태로 나타낼 수 있다. 여기서 5 는 관측자에서 위성까지의 시선 거리 벡터, Z 는 측지 천정 방향의 단위 벡터를 의미한다. 또한, 그립 2-13 과 같은 적도 좌표계에서 단위 벡터 Z 의 성 분은 일반적으로 Zx=cos 8 cos ¢> Zy = sin 8 cos 8 Zz=sin ¢> 2-135 가 되며, 여기서 O 는 시간각, ¢는 측지 위도를 의미한다.
 +zh
+zh
이제 위성이 지구 중심으로부터 r 만큼 떨어전 곳에서 원 궤도 를 운동하고 있다고 가정하면, 위성의 위치는 관측자, 위성, 역 학적 중심 사이의 관계를 이용하여 fi= r +R 2-136 의 형태로 나타낼 수 있다. 여기서 7 은 지구 중심에서 본 궤도 의 반경 벡터이고 R 은 관측자의 좌표 벡터이다. 이것을 식 2 - 134 에 대입하면 ( r + R) • 2 = p sin h 2-137 의 관계가 성립하며, 이때 R 은 X = -G 1 cos ¢ cos 0 Y = -G 1 cos ¢ sin 0 Z=-Gi si n ¢ 2-138 의 성분으로 분리되어 나타낼 수 있고, 계수 Gb G 는 각각 동 서선 곡률 반경, 추적 안테나에서 적도면까지의 곡률 반경을 나 타내는데, G✓ 11- (2f —=f)s~i n 2 ¢ 2-139 CnJ1= -(~2 f -= F)Gsin2 1 ¢ (l-/)2 2-140 의 형태로 표시된다. 이 식에서 REB 는 지구의 적도 반경, f는 Bessel 타원체의 편평률을 의미한다. 이들 관계를 식 2-137 에 대 입하여 정리하면 p sin h= (x-G1 cos 8 cos ¢) cos 8 cos ¢ + (y- G1 sin 8 cos ¢)sin 8 cos ¢
+ (z-C i sin ) sin 2-141 또는 x cos 0 cos
2.8.5 우주 속도 최근에 들어서 제 1, 제 2, 제 3 우쿠느 속도라는 말이 우주과학 관련 용어로 많이 사용된다. 이들은 인공위성이나 우주선의 발사 시에 이들의 궤도를 결정해 주는 주요한 세 가지 속도를 나타내 며, 발사 목적에 따라 적당한 속도가 선택된다. 제 1 우주 속도라는 개념은 지구 주위를 원 궤도를 따라 움직이 는 인공위성의 속도 Vi=P.곤 ;2 의미한다. 예를 들면, 지상 300 km 고도에서 원 궤도 속도는 Vi= 7.73 km/s 이므로 이것이 이 지점에서의 제 l 우주 속도가 된다. 제 2 우주 속도는 지구 인력권 탈출 속도라고도 불리며, 포물선 궤도 속도인 距{西門굽을 의미한다. 예를 들면 지상 300 km 고도에서 탈출 속도는 비행 방향에 관계없이 ½=10.93km/s 가 되며, 이 속도가 그 지점에서의 제 2 우주 속도로 정의된다. 이 돌 제 1, 재 2 우주 속도는 지구의 인력울 고려한 개념이다. 반 면에 제 3 우주 속도는 지구 인력권을 탈출한 후, 우주선의 속도 가 지구의 공전 속도와 합해져서 태양의 인력권을 벗어날 수 있 게 될 때 지구에서 가해 준 출발 속도를 말한다. 포물선 궤도의 경우에 있어서는 지구 인력권을 벗어난 후 속도가 0 이 되므로 제 3 우주 속도는 쌍곡선 궤도 속도가 되어야 한다. 그러나 실제로 는 지구가 태양 주위를 29.78km/s 의 속도로 공전하고 있으므로 우리는 태양계 탈출 속도에서 지구의 공전 속도를 빼준 29.28 km/sx (訖 -1) =12.34 km/s= V. . 만큼의 속도만을 가해 주면 태양계 탈출을 가능하게 할 수 있다.
제 3 의 우주 속도를 l/2= Vi +LlV 라 하면 에너지 보존 법칙으 로부터 }따 +4V)2_ G1??i = 2?門 : ) 국 v~ 이 성립되고, 이 경우 〔仁 G1;t e 이므로 2 祐 L1V+ (LlV)2= V~ 으로 간단히 정리할 수 있다. 지구 상공 300km 에서의 제 3 우주 속도는 2X10.93XL1V+ (LlV)2=12.342 이므로, 4V 에 대한 2 차 방정식을 풀어주면 L1V=-l0.93+J (10 . 93) 도 (12 .34 )2 =5.55 (km/s) 라는 값을 얻을 수 있다. 따라서, 이 경우 제 3 의 우주 속도는 ½=10 .93+5. 55=16.48 (km/s) 가 된다. 다시 말하면 지구 상공 300 km 에서 쌍곡선 궤도의 점 근선 방향이 지구의 공전 방향이 되게 16.48 km/s 로 발사된 우 주선은 약 1 일 후 지구 인력권을 벗어나고, 또 수백만 년 후 태 양 인력권을 벗어나 다른 천체로 비행하게 되는 것이다. 참고로 포물선 궤도의 탈출 속도 10.93km/s 로 지구 인력권을 탈출한 후에는 속도가 0 이 되지만, 쌍곡선 궤도의 속도 16.48 km/s 는 지구 인력권을 탈출한 후에도 Vco=12.34 km/s 의 속도가 남아 있게 되어 지구 인력권에 의한 속도 손실이 작다.
2. 8. 6 행성간 우주선 행성간 우주선의 항행 궤도는 4 체 문제의 운동 방정식을 수치 적분하여 풀어야 하지만, 이 절에서는 간단히 예를 보이기 위해 2 체 문제로 한정하여 항행 궤도를 설명하여 보겠다. 고전적인 Hohmann 궤도를 따라 다른 행성으로 항행하는 경우 에 우주선의 출발과 도착 지점은 타원의 근일점과 원일점이 된 다. 이러한 궤도는 여러 가지 천이 궤도 중 최소 에너지 궤도가 되지만, 반면에 항행 시간은 가장 길어지게 된다. 행성간 탐사의 경우에는 우주선의 운동이 크게 지구 중력권 탈 출, 태양 인력권에서의 천이 궤도 운행, 행성 인력권 전입의 세 부분으로 나누어진다. 우주선이 지구 궤도를 탈출할 때 우주선은 지구에 대해서 포물선 혹은 쌍곡선 탈출 궤도를 갖게 되며, 이 경우 지구 인력 작용권 구의 반경이 약 100 만 km 이므로, 이곳에 도착할 때의 우주선의 속도 (VOO) 와 지구의 공전 속도와의 벡터합 이 행성간 우주선의 항행 속도가 된다. 일반적으로 지구 상공 h=300km 의 주차 궤도에서 우주선의 속도는 Vp ark={ :三 =V 霜~ =7.73(km/s) 가 되고, 지구R에so 1 대= 한re( 二인)력응 작=용 l.권 4의96 X반 1경0은8 (~t 2 늑 106km 의 형태로 얻어낼 수 있다.
이해를 돕기 위해 화성행 우주선의 최소 에너지 궤도를 예로 들어 생각해 보자. 위에서 밝힌 바와 같이 행성간 우주선의 최소 에너지 궤도는 지구에서 근일점이 되고, 화성에서 원일점이 되는 타원 궤도가 되어야 한다. 따라서, 그러한 궤도를 가정하면, 이 궤도의 장반경은 a1=(re+rm)/2=2.5237/2=1 . 26185(AU) 의 값 울 갖게 되고, 태양계 중력권 내에서 우주선이 지구로부터 출 발 하는 속도는 이 타원 궤도의 근일점에서의 속도와 같으므로 VP= ✓ Gm~ 信 ―f) =32.73 km/s 가 된다. 이 경우 지구의 공전 속도가 Ve =29 . 78km/s 이므로 지 구 인력권 탈출 후 속도 V. . = Vp -V e=2.95 km/s 가 더해져야 한 다. 지구 상공의 주차 궤도로부터 화성까지의 우주선의 항행 시 간은 케플러의 제 3 법칙에 따라 t 3 기 1 =1r~=259 일이 소요 된다. 앞에서 설명한 바와 같이 우주선이 지구의 인력권을 벗어나 화 성에 도착하기 위해서는 이 우주선이 쌍곡선 궤도를 따라 움직여 나가야 한다. 이 경우 우주선이 지구의 인력권을 탈출하는 데 필 요한 속도는 VOO= J Gm e /(-a e ) 이므로 이 식으로부터 쌍곡선 궤 도의 장반경은 a9= - 압 = —458 03 km 가 됨을 알 수 있다. 또한, 쌍곡선 궤도의 근지점에 해당하는 주 차 궤도 h=300km 에서의 속도 V 는 위에서 얻은 값들로부터 v= ✓ Gme( Re2+h + (一\;f} =11.32 km/s
가 된다. 이 쌍곡선 궤도에 있어서 궤도 이심률은 e=l+( —~a EB ) = l. 14 58 이 되고, 점근선의 각은 0oo=COS-l (—1) = 150.8° 의 값 을 갖는다. 또, 지구의 인력이 미치는 작용권 구의 반경은 Rso1= (- a m ) (e cash F— 1) 의 식으로부터 얻어지므로, 결국 F=cosh-1 [¥1+ (—~ )]=3.6846 가 되고, 이 값으로부터 쌍곡선 궤도로 지구 인력권을 탈출하는 데 걸리는 시간 t는 t= ~(esin hF — F) =3.44 (일) 이 됨을 알 수 있다. 표 2 - 2 는 행성간 우주선의 최소 에너지 궤도에 대하여 쌍곡선 궤도로― 지구 인력권을 탈출하는 속도, 지구의 인력이 미치는 작 용권구 내에서의 우주선 속도, 태양계 중력권에서 지구 공전 속 도와 합한 초기 우주선 속도, 그리고 행성까지의 편도 항행 시간 을 보이고 있다. 표 2-2 에 나와 있는 편도 항행 시간에는 쌍곡선 궤도로- 지구 인력권을 탈출하는 데 소요되는 시간과 목표로 하는 행성에 전입하는 시간은 포함되지 않았다. 주차 궤도 h=300km 에서 포물선 궤도로의 탈출 속도는 10.93km/s 이고, 쌍곡선 궤도
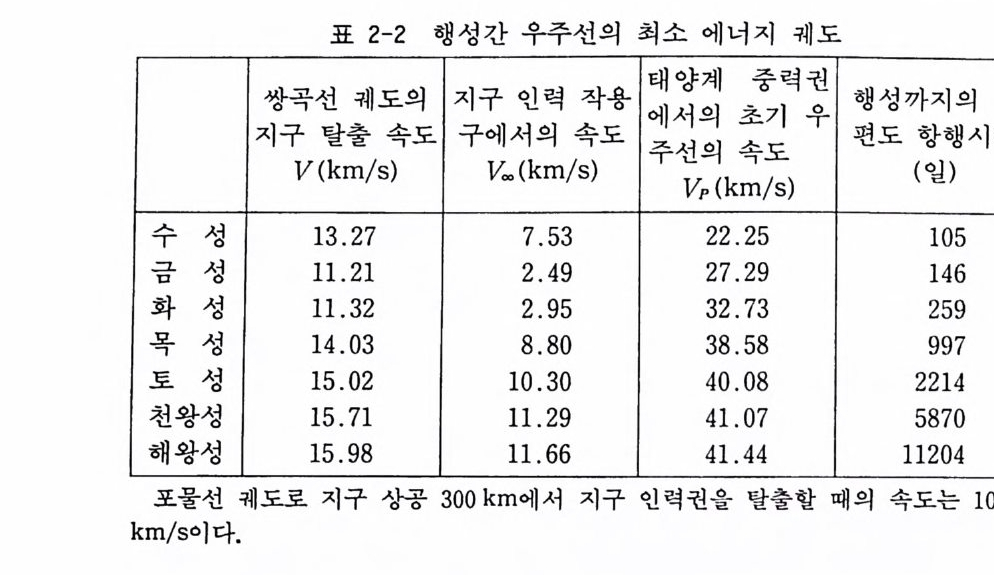 표 2-2 행성간 우주선의 최소 에너지 궤도
표 2-2 행성간 우주선의 최소 에너지 궤도
탈출 속도인 경우에는 포물선 궤도 때보다 약간 크다. 쌍곡선 탈 출 속도를 갖는 항성간 우주선은 지구 인력 작용권 반경인 100 만 km 에서의 속도 VOO 와 지구 공전 속도를 더하여 목표로 하는 행 성으로 항행하게 된다. 지금까지 우리는 행성간 우주선의 궤도에 대해서 생각해 보았 다. 여기서는 화성의 경우에 대해서만 예를 둘었지만 다른 행성 의 경우에 있어서도 이와 비슷한 형태의 궤도를 갖게 된다. 하지 만, 모든 행성에 대해서 이것이 다 똑같은 것은 아니고, 행성의 위치가 지구 궤도의 어느 쪽에 존재하느냐에 따라서 그 방향이 조금씩 달라지게 되는데 내행성간 우주선은 지구의 공전 방향과 반대 방향으로 쌍곡선 점근선 방향을 가지게 하여 합성 우주선 속도를 줄여야 하고, 의행성간 우주선은 지구의 공전 방향과 같 은 방향으로 점근선의 방향을 가지게 하여 합성 우주선 속도를 지구 공전 속도보다 크게 해주어야 한다.
참고 문헌 Baker, R. M. L., 1967, Astr o dyn ami cs : Ap pli ca ti on s and Advanced Top ics (Academi c: New York) . Bate , R. R., Mueller, D. D. & Whit e, J. E., 1 971, Fundamenta ls of Astr o dyn ami cs (Dover: New York) . Batt in, R. H. , 1964, Astr o nauti ca l Guid a nce (McGraw Hi ll: New York). Choboto v , V. A., 1 991 , Orbit al Mechanic s (AIAA: Washin g ton D. C.) . Conway, B. A., 1986, An Imp ro ved Algo ri thm Due to La gu erref or the Soluti on of Kepl e r's Eq ua ti on , Celestia l Mechanic s , 39, pp. 199-211. Danby , J. M. A., 1989, Fundamenta ls of Celestia l Mechanic s , 2nd edit ion (W illm ann-Bell: R ic h mond) . Escobal, P. R., 1 975, Meth o ds of Orbit Dete r mi na ti on , 2nd edit ion (Jo hn W iley & Sons: New York) . Escobal, P. R., 1968, Meth o ds of Astr o dyn ami cs (Jo hn W iley & Son: New York). Herric k , S., 1971 , 1972, Astr o dyn ami cs , I and II (Van Nostr a nd: New York) Hori, Genic h ir o u, 1988, 『 天體力學講義 』 (東京大學出版會 : 東京). Moulto n , F. R., 1914, An Intr o ductz' on to Celestz'a l Mechanic s , 2nd edit ion (MacMi llan : New York) . Roy, A. E., 1982, Orbit al Motz 'on , 2nd edit ion (Adam Hilg e r: Bris t o l ) . Taff , L. G., 1985, Celestia l Mechanic s (Jo hn W iley & Sons : New York).
제 3 장 3 체 문제 와 N 체 문제 3.1 제한 3 체 문제 우리는 앞 장에서 2 개의 물체가 그들의 질량 중심 주위를 회전 운동하는 경우에 대해 살펴보았다. 2 체계의 경우 초기의 위치와 속도가 주어지면, 그 계의 운동 방정식을 풀이함으로써 임의의 시간에서의 그 물체의 운동을 예측할 수 있었다. 그러나 어떤 물 체의 운동에 관여하는 천체의 개수가 증가함에 따라 그 운동의 양상은 점점 복잡해지게 되어 3 개 또는 그 이상의 질점(천체)이 만유인력의 지배를 받고 있을 경우는 이들의 운동에 대한 일반 해를 얻을 수 없다. 하지만, 3 체 이상의 천체가 존재하는 경우에 도 질량 중심에 대한 등속 직선 운동의 적분 (6 개의 상수를 포함한 다)과 각운동량의 3 개의 성분, 에너지 적분(상수 1 개)은 반드시 존재하여 적분상수의 총수는 6+3+1=10 개가 된다. 앞에서 언급했듯이 3 체일 경우는 운동 방정식의 일반 해를 구 해낼 수 없으며, 오직 정삼각형 해와 칙선 해라 불리는 특수 해 들만이 존재한다. 이 중 정삼각형 해는 3 체가 정삼각형의 꼭지점
에 위치하여 전체가 질량 중심의 주위를 정삼각형의 평면 상에서 공전하는 경우를 말하며, 직선 해란 3 체가 일직선상의 특정한 거 리에 위치하여 이 계 전체가 질량 중심 주위를 공전하는 것을 말 한다. 그러나 이들 특수 해는 m1 과 ??Z2 가 유한의 질량을 가지고 있 고, m3 는 무시될 수 있을 정도로 작은 질량을 갖는 경우 이의에 는 모두 불안정한 성질을 나타낸다. 이처럼 m1, m2 로 이루어진 회전 좌표계에서 mI, m2 에 비해 무시할 수 있을 정도로 작은 m3 의 운동을 나타낸 것을 제한 3 체 문제라 한다. 이 절에서는 이와 같이 특수한 형태를 갖는 3 체계의 운동에 대해서 살펴보기 로하겠다. 3.1.1 원 궤도인 경우 한 질점 m3 가 다른 두 질점 m1, m2 에 비해 무시할 수 있을 만큼 작은 질량을 갖고 있다고 할 때, m3 의 관성 좌표계에서의 운동 방정식을 퍼텐셜의 함수 U 를 사용하여 기술하면 다음과 같이 나타난다. §=불 1.J. = aau1J t=a뿌g 3-1 여기서 U= 오쁘+요쁘녀 형태로 주어지고, r1 과 r2 는 m1 과 r1 r2 m2 로부터 m3 까지의 거리를 말한다.
하지만 이러한 관성 좌표계는 mI, m2 의 둘레를 회전하는 m3 의 운동을 나타내는 데 있어서 많은 불편함을 가지고 있으며, 방 정식의 형태를 단순화시켜 주기 위해서는 이 계와 함께 움직이는 새로운 좌표 체계의 도입이 필요하다. 이것을 위해 먼저 mb m2 의 운동이 질량 중심에 대해 그 주위를 원을 그리며 돈다고 가정하고, 그 질량 중심을 원점으로 하고 m1, m2 와 함께 일정 한 각속도 11 으로 공전하는 새로운 회전 좌표계 (x, y, z) 를 생 각하자. 이 경우 mI, m2 는 항상 x 축상에 있으며, 회전축이 z 축 (g축과 일치)이라고 하면 관성 좌표계와 회전 좌표계 사이의 변 환 관계식은 다음과 같이 나타낼 수 있다. (x:) = ( _cos 二。 csoin s。 nntt 0J\0 (IEg11)\ n \' 3-2 __ 여기서 n=21r/P 이고, P 는 주기를 의미한다. 일반적으로 회전하는 계에서의 물체의 운동 방정식은 f+ 2nkx t+ nkx (nkx r)= 뿔 의 모습으로, 관성계의 경우에 비해 코리올리의 힘과 원심력의 영향이 첨가되어 나타난다. 이 관계식과 식 3-2 를 이용하여 관성 좌표계의 운동 방정식을 회전 좌표계에서의 운동 방정식으로 바 꾸어 줄 수 있다. x-2ny —n2x .= 一aaux_ y +2n i―같y=aa―uy 3-3
z.. = aauz 여기서 위의 세 식에 각각 x, y, 之울 곱하고, 그런 다음 세 식을 모두 더해서 시간 t에 대해서 적분하면 다음과 갇이 유용 한 식을 얻을 수 있다. }(X2 군군 )=½n2(x2 군)+ G:? +은 ~-c 3-4 이 것울 자코비 적 분 (Ja cobia n int e g ral ) 이 라 부르고, 여 기 서 C 는 에너지 적분상수에 해당한다. 식 3-4 는 회전 좌표계에서의 속도 v 롤 사용하여 다시 上2 #=보2 (x2 군) +요rl짝 +요r座2 _ C 3-5 의 형태로도 나타낼 수 있다. 이제 위에서 구한 자코비 적분을 쌍성계의 경우에 적용시켜 보 자. 먼저 질량 중심을 원점으로 잡았던 것을 주성인 m1 으로 좌 표계의 원점을 옮겨서 기술해 보도록 하자. 이런 좌표계에서의 자코비 적분은 다음과 같은 형태로 표시된다. 강#=-f [(x ― ~Y+ y 2]+ 亨L + 릉도 c 3-6 위의 식에서 m?:2 2 t 원점을 질량 중심에서 주성으로 이동시 킴으로 인해 생긴 항이고, a 는 궤도의 장반경이다. 식 3-6 을 전 개하면 靜=京 x2-~ 군)+亨 L+ 톤 -C 3-7
가 되며, 이때 ( m?:z 2)2 의 항이 생기지만 이것은 상수값이므 로 물리적으로 별 의미가 없어서 소거할 수 있다. 이 방법 의에도 자코비 적분은 다음과 같은 형태로도 나타낼 수 있다 (Szebehel y 1967). ½ v2= Gm1( 홀+-¾;) + cm2( 틀+〉) _올 (m1 十 加) 검― C 3-8 식 3_8 에서 G=l , a=l, m1+m2=l 로 놓고, r1 과 r2 가 x— y 평면 상에 있다고 가정하면 ½v2= (l-m2 ) (구나) + m2( 구+-¼)- c 3-8' 처럼 간단한 형태의 식을 얻어낼 수 있다. 이 경우 자코비 적분 은 오직 r1, r2 만의 함수가 되므로, 식 3-5 보다 m3 운동을 기술 하는 데 매우 편리하다. 3.l.2 타원 궤도의 경우 원운동이 아닌 경우에서 제한 3 체 문제는 훨씬 더 복잡해지기 때문에 지금까지 원 운동의 경우보다 연구가 활발하게 이루어지 지 않았다. 비원운동에서 제한 3 체 문제가 이렇게 복잡하게 나타 나는 데는 크게 두 가지 원인이 있다. 바로 m1, m2 의 운동이 더 복잡하고 자코비 적분이 사라지기 때문이다. 그러나 문제해결 의 방법이 전혀 없는 것은 아니며, 〈회전-전동 좌표계〉를 도입함 으로써 간단하게 계의 운동을 표시 할 수 있다• 회전-전동 좌표계는 다음과 같은 몇 가지 성질들을 가지고 있
 z
z
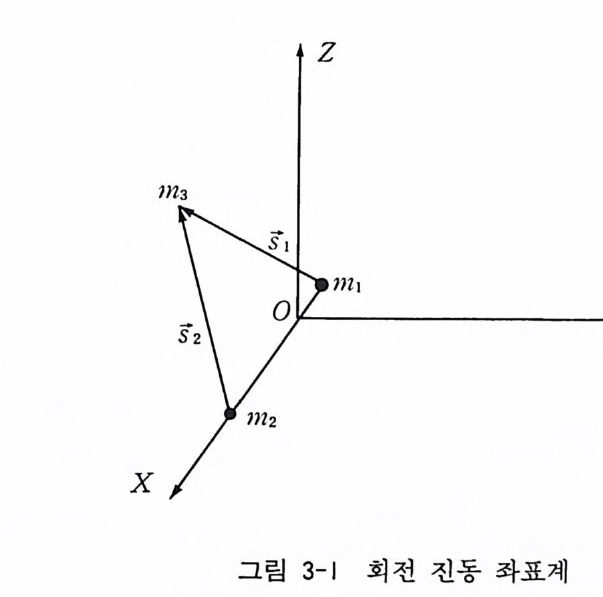
다 (Marchal 1990) . a) OXY 평면은 2 개의 mI, m2 들의 궤도면이 된다. b) 어떤 임의의 시간에서도 단위 길이는 2 개의 mI' ”& 사이의 거 리가 된다. 따라서 단위 길이는 변하는 양이 된다 . c) mi . m2½ 은 고정된 횡축을 가지며, 이 축 위에서 고정된 위치 롤 가지는 X 축 위에 자리하고 있다. d) 일반적으로 원점은 m1 과 m2 의 질량 중심이나 mI, m2 중 어느 하나가 되지만, 다론 점이 될 수도·있다. 예를 들어 동일 축상에 있는 라그랑지 점들 중 하나가 이 좌표계의 원점이 될 수도 있다. e) 계를 기술하는 매개 변수는 시간이 아니고 궤도를 따라서 변화 하는 mI, m 려 진근접각 f가 된다. 따라서, 도함수들은 모두 전 근접각에 대한 미분들로 나타난다. f) si과 S2는 이 좌표계에서 mI, m2 에 대한 m3 의 위치 벡터를 나
타낸다. 이 벡터들은 fi= (\XI), S2=(\X2) 와 같이 세 성분으로 나눌 수 있으며, 여기서 x2=l+X1 , s1= ~Y1 2 • ' S2- = 끄1'1 넷2 의미하고 X1 과 X 2 는 고정되어 있다. 앞에서 살펴본 것과 같은 회전껏 1 동 좌표계에서 질점 m3 의 운 동 방정식을 전근점각의 독립변수로 표시하면 다음과 같다 (Marchal 1990) . 巧:) = (::':) = m1 麟\ : :2:2es!:\ _J/;i3) + ( :—::,) 3-9 여기서 e 는 m1 과 m2 의 궤도 이심률이고, '=d/dv 울 표시한다. 이 식에서 보면, 만약 e 가 0 이 되면 원 운동 제한 3 체 문제에서 의 운동 방정식과 같은 형태가 됨을 알 수 있다. 식 3-9 는 다음과 같은 해밀토니안 형태로도 표현할 수 있다. 汀 . =(:〉 5=(::> (::::) H= 강 [(x3- py)나 (y 3+ p김나꿇+p깁 m1(( 장m1++¾m2)) (+1 m+2e( 룬cos나 기) 3-10
여기서, 위에 사용된 각 변수들은 S1 = [ (x3 -X1) 2 + yj 녀]}, S2 = [ (X3 궁) 2 + yJ + 좌] } H=H(p, q, ))) 브d호)) =깝apL ' 4dE)) =- 인aq 과 감은 값을 갖는다. 식 3-10 은 질접 m3 의 복잡한 운동을 다루는 데 있어서 매우 유용하게 사용되며, 다음의 몇 가지 기본적인 성질들을 가지고 있다. 1) 궤도 이심률이 0 인 경우에 위의 해밀토니안 계는 간단하게 표현 된다. 죽, 이 경우 짚'afv. . =o 이므로 H 는 u 에 따라 일정한 값을 가 지며, 그렇게 되면 자코비 운동 적분 I'는 ― 2H 와 같아지게 된다. 2) 이 제한 3 체 문제의 해밀토니안 공식은 일반 해밀토니안 공식과 많은 유사점을 가지고 있다. 그러나 일반 해밀토니안 공식은 제 한 3 체에 응용되지 않으며, 매개 변수 E 가 모두 같은 모양으로 0 이 되고 aH/a Pi가 정의되어 있지 않다. 원 운동이 아닌 제한 3 체 문제의 주요 문제점은 자코비 운동적 분이 없어진다는 것이지만, 다행히도 이 적분에 관계된 정량적인 결과들이 보존될 수는 있다. 원 운동 제한 3 체 문제에서의 자코 비 적분은 식 3-5 로부터 에너지 적분상수 C 에다 -2- !-m1m2 를 더하 여 새로운 적분상수 I'를 얻음으로써 구해낼 수 있다. 이때, c 는 질량 중심에서 m3 까지의 거리와· r13, r23 와의 함수이지만, r 는 식 3-11 에서 보듯이 r13, r23 만의 함수로 표시된다 (Szebehel y 1967).
I'= m1(¾+ rl3)+ m2(¾+ Yi3 ) ― z: 구= C+½m 團 3-11 반면에 원 운동이 아닌 제한 3 체 문제의 자코비 적분은 다음과 같이 나타낼 수 있다. r= mIm+1m2(i +s f) + ~-;-+s1) —(1 +e cos 11) ( zl+x?+ y 32+ 검) 3-12 여기서 식 3-12 를 II 에 대해 미분하면 u 를 포함하지 않는 항들은 없어져서 —ddIv' =e sin v( zi +x?+Ya2+ 강) 3-13 과 같은 관계가 얻어전다. e=O 인 경우에는 v=n t이므로 식 3-12 은 I'= mIm+1m2 다 +sr)+ 二노 (¾+sl)_ (격+ 셔+ yg+ 처) 3-14 처럼 식 3-11 과 같은 형태로 표시되는데, 이것이 여기서 자코비 적분의 역할을 한다. 반면에 이심률이 타원에 해당하는 경우에는 I'는 일정한 값을 가지지 않게 되며, I'의 도함수의 변화에 대한 부호는 s i n/ 에 따라 결정된다. 위 식에서 11=Zk1r(k 는 정수)일 때는 최소값을 가지고, v=(2k+l)1r 일 때 I'는 최대값을 가진 다. 일반적으로 mI, m2 의 거리가 매우 가까우면 보통 血의 탈 출을 기대할 수 있다. 계가 불안정하지만 이런 계에 대한 수치 계산은 원 운동 제한 3 체 문제에서의 안정성에 대해 m3 의 안정 성은 거의 차이가 나지 않음을 나타내고 있다.
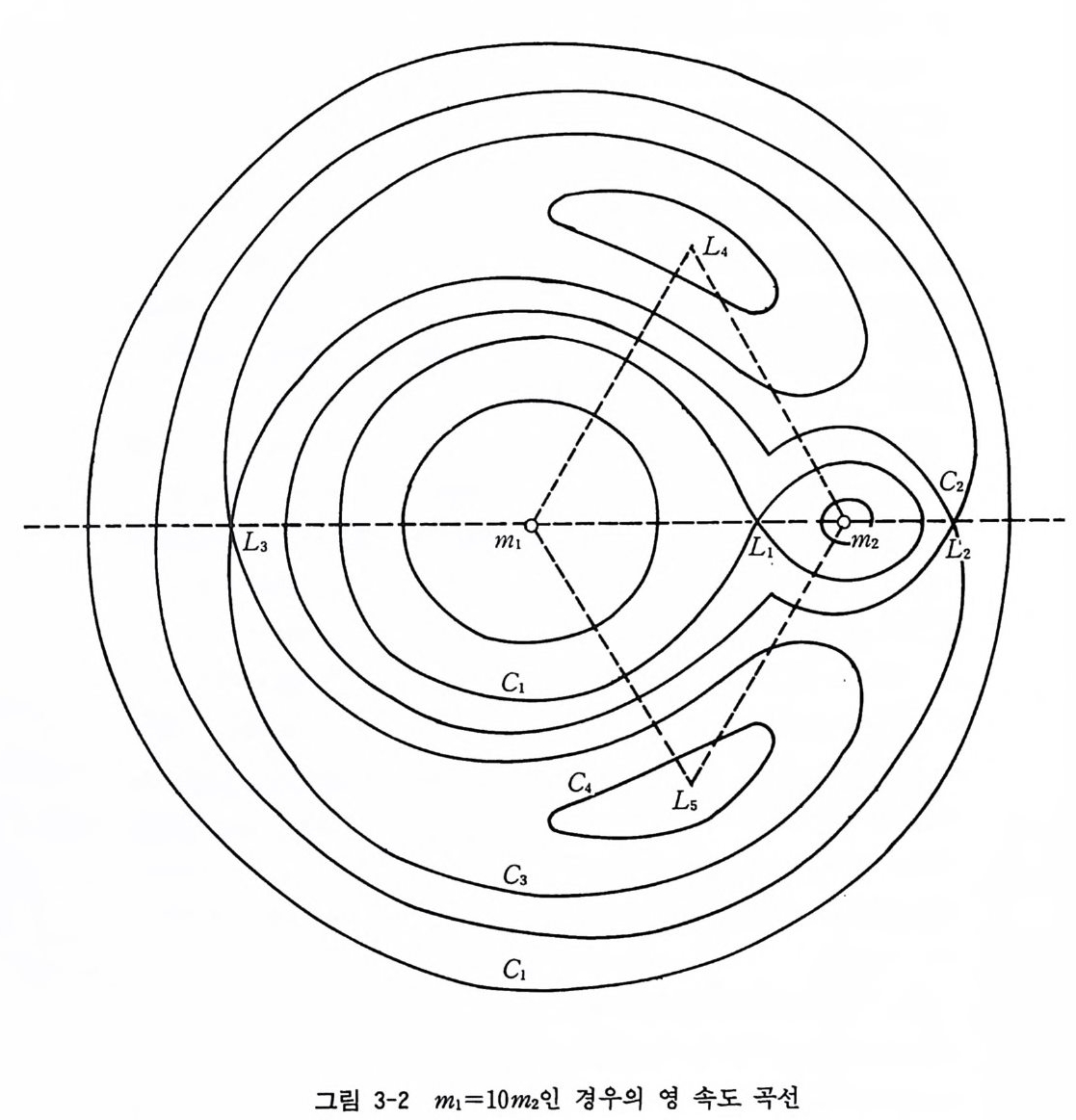
3.1.3 영 속도 곡선 계를 최대한 간단하게 만들기 위해 m1 과 m2 의 각 물리량들에 대해 다음과 같이 가정하기로 하자. G=l, m,+m2=l , m2=µ, m1=l— µ, a=l, n=l 여기서 a 는 mI, m2 사이의 거리, 죽 원 궤도의 반경이며 n= 21r/P 를 나타낸다. 이렇게 단순화한 계에서 자코비 적분은 식 3-5 로부터 다음과 같이 나타낼 수 있다. v2= (x2+y 2 ) +~r1 +뚜r2- ― C 3- 15 이 식에서 rl= ✓ (x ―xJ2+7, r2=/(x-x2)2+ y 2 를 의미하며, 이 경우 x2+ y 2+2U-C=O 으로 놓거나 또는 v=O 으로 놓으면 영 속도 곡선을 찾을 수 있다. 그러면 식 3-15 는 갔+y 2✓ (+x-xl)~2+ y 2+ ✓ (~x ― X2=)2+ y C2 3-16 의 형태로 다시 나타낼 수 있고, 이 식의 해를 구함으로써 바로 영 속도 곡선을 얻을 수 있게 된다. 참고로 2 체 문제에서 에너지 적분식은 뇨2 2_ 요Mr_ _ =E 로 표시되는데, 이때 속도 v 가 0 이 되면 영 속도 곡선, 죽 등퍼 텐셜 곡선은 그림 3-2 와 같이 둥근 원의 형태로 나타난다.
 /
/
이제 위에서 살펴본 영 속도 곡선을 3 체 문제에 적용해 보기로 하자. 제한 3 체 문제의 경우에서 영 속도 곡선의 형태는 C 값의 크기에 따라 그 모습이 달라지게 된다. 먼저 C 가 매우 클 경우에 대해서 살펴보자. C 가 매우 커지기 위해서는 식 3-16 에서 x, y가 매우 크거나, 또는 r1, r2 가 매우 작아지면 된다. 이렇게 되는 경우에 C 를 G 로 정의한다. 둘째, 여기서 C 값을 접점 감소시켜 나가면 (1-µ) 와 µ 주위 롤 둘러싸고 있는 타원체는 접점 팽창해 가고, 반면에 바깥의 타 원체는 그림의 중심을 향해 이동해 가게 된다. 그 결과 (1—µ) 와 µ주위를 둘러싸고 있는 타원체가 한 점에서 만나게 되는데, 그 때의 C 를 C1 으로 정의하며, 이때 타원체가 만나는 점을 LI 으로 표시하고, 내부 라그랑지점이라고 부른다. 셋째, C 가 점점 더 감소하면 결국 L 검은 없어지고, 두 개의 타원체가 붙어서 점점 커지다가 한쪽 타원체가 의부의 대원과 만 나게 되는데 이 만나는 점을 L 로 나타내고 의부 라그랑지점이 라고 부른다. 이때의 C 값은 G 로 정의된다. 만약, 어떤 물체가 내부의 타원체 안에서 L로 접근하면 점점 속도가 줄어들다가 L 2 를 지나는 순간 속도는 순간적으로 0 이 되고, 대원을 빠져나오 면 점점 속도가 증가하게 되어 이론적으로 거리도 무한대, 속도 도 무한대가 된다. 이런 설명은 쉽게 이해하기 힘들며, 실제 우 주에서는 대원 밖의 물리 현상은 잘 적용되지 않는다. 그 이유는 우주는 3 체만으로 이루어져 있지 않으며, 따라서 의부 천체들에 의한 섭동을 받기 때문에 실제로는 이 이론이 동일하게 적용되지 않는 것이다. 넷째, 만약 위의 경우에서 계속해서 C 가 작아지면 L점은 사 라져서, 한쪽 타원체는 완전히 열려 버리고 나머지 한쪽도 대원 과 만나게 되는데, 이 지점을 L로 정의하고 이때의 C 는 G로
나타낸다. 다섯째, C 가 계속해서 작아지면 결국은 대원은 사라지고 조그 만 폐곡선만 남아 mI, m2 와 정삼각형의 아래 위 꼭지점을 이루 는 곳에 위치하게 되는데, 이 지점을 L ◄, Ls 로 나타낸다. 이 경 우는 실제 우주의 천체 현상에도 나타나며, 그 대표적 경우가 목 성의 궤도에 위치한 트로이 소행성군이다. 그림에서와 갇이 태양 과 목성의 질량을 mI, m2 로 봤을 때 L4 점과 L 점에 이 소행성 들이 모여 있는 것이다. 지구와 달 궤도에서도 이와 비슷하게 L4 점에 쓰레기 같은 티끌들이 모여 있다. 그리고 1980 년에 발견된 토성의 새로운 위성 하나도 토성 (mI) 과 디오네 (m2) 와 함께 정 삼각형을 이루는 L4 의 자리에 위치하고 있다. 지금까지 영 속도 곡선의 변화를 이용하여 라그랑지 점들의 위 치를 살펴보았다. 이제부터는 Lb L, L, Lb 뇨점들의 위치를 수치적으로 구해보도록 하자. 앞에서 살펴보았듯이 자코비 적분은 식 3-4 에서 上2 (었+합+찼)=요 -C 3-17 요=브 (x2+ y 2) + Gm1 +요쁘 2 m r2 의 형태로 나타나며, 여기서 문제의 단순화를 위해 n=l 이라고 가정을 하면 다음과 갇이 정의된다. 요 =--2! -[(1-µ) rl+µr l]+lm= 白 Lr2 = f (r i, r2) 3-18 요=--!2- [ (1-µ) ( (x+µ)2 군) +µ( (x-1+µ)2+Y2) ]+느rl 끄+上r2 =--2! -[(1-µ) (x2+2xµ+µ2+y 2)
+µ(x 드 (1— µ )x+ (1 ― µ)2 군)]+느r1上 +上r2 =上2 田+y 2) +느m쓰 +上r2 (2 차원) 3-1 9 이 경우에 (1 一µ)러 µ(l -µ)2 의 항은 상수항이 되어 물리적으로 별다른 의미를 갖지 않기 때문에 모두 사라지게 된다. 따라서, 자코비 적분은 아래와 같이 단순하게 나타낼 수 있다. v2=x2+y 2 +1 Jl—r1 µ) +11r2:! __ C 3-20 앞에 보았듯이 위의 식에서 v=O 인 경우 0 속도 곡선을 얻을 수 있다. 이 경우 자코비 적분은 f(x , y) =x2+y 2 +1 i!—r1 µ) +k r2 =c 3-21 와 같이 x, y에 대한 함수의 형태로써 표시할 수 있으며, 라그 랑지점과 같은 안정된 지점을 얻기 위해선 다음의 두 조건을 만 족해야 한다. —88fx =0, —a8fy = O 3-22 따라서, 식 3-21 을 x, y에 대해 편미분하면 쿄ax - =x ― (1_µ) r(f x ?) _ µ(xr—: ~= O 3-23 lafy= y — (1— rfµ )y —쓱r2 =0 3-24 의 관계식을 얻어낼 수 있다. 이 경우 x 축 위에 있는 라그랑지 점들에 대해서는 y =O 로 놓으면 위 식은
x-(W1 -(µx)— (X xI-)x21)3) (Jµ ((xx--xx22)) 2 ) 3 =O 3-25 처럼 간단한 형태로 나타낼 수 있다. 이제 식 3-25 로부터 라그랑 지점들을 구해보기로 하자. i ) 먼저 내부 라그랑지점 L1 점을 구해보도록 하자. L1 점은 m1 과 m2 사이의 어느 한 지점에 위치하므로 초기 조건이 다음과 같 이 주어지며 x1
아보자. L 점은 1112 보다 더 먼 곳에 위치하므로 그 초기 조건은 x>x2 로 주어진다• ?? 22 에서 L 점까지 거리를 r 라고 하면 식 3-25 는 x_ (l 一(µ1)+ ( r1)3+ r) 一 4군= o 3-32 의 형태로 나타낼 수 있으며, 이것을 정리하면 l-µ+r(-l+~r) 2 _-1군 4; = 0 3-33 군( (11-+µ r)) 2r(21+— r3µ++ (r1)— -µ군 ) 2(rl3-+µ2)r 4—+µ ((l1+-µ r)) 2r=4+0 r5 3-34 -군 (l-µ) -µ(1+2r-군 ) =0 3-35 군+ (3— µ) r 나 (3-2µ) r3-µ 군 -2µr-µ=0 3-36 와 같은 최종적인 식을 얻을 수 있다. 식 3-36 의 해는 다음과 같이 급수전개된 형태로 표시된다. r= (꿈)門+訂)\_祖)홍+… 3-3 7 iii) ½점의 경우 m1 에서 L 까지 거리를 1 一 r 라고 하면 (1- µ)X1+µx2=0 x=-(µ +1) + r 3-38 와 같은 관계를 만족하며, 식 3-25 는 x+ (1-(µl)- r(1)3— r) +• (2三-r) =O 3-39 의 형태로 표시된다. 여기에 식 3-38 의 관계를 대입하여 정리하면 다음과 같은 식들을 얻을 수 있다.
-(µ + l) +r+ 三(1 —+r) 2— ' (上2 —―r) 2 =0 3-40 (l- 2 r- 군 ) (4- 4 r+ 군 ) == 4r4- 一4 6r 군+ +r 25 -r22 — r 34+ r 4 + 군 4 -4r3+ r4 3-41 이 식 들 은 결국 r 드 (7+µ) r4+ (19+6µ) r 드 (24+13µ) 군+ (12 +14µ) r— 7µ =0 3-42 와 갇 이 정리할 수 있으며, 식 3 - 42 의 해는 다음과 같이 나타난다. r=—17 2 µ.r. + •I 210172376 µ.. 3 + … 3-43 iv) 이제 마지막으로 L4, Lr,점을 구해 보자. 이 경우에는 y가 0 이 아니므로 y_요rf 무 _ 꼬r: = 0 3-44 또는 1_ (l 규rf L) _ _rE:, = o 3-45 의 관계가 성립한다. 위 식을 만족하는 해는 오직 ri= r2=l 3-46 인 경우로서 제 3 천체는 m1 과 m2 로부터 정삼각형의 꼭지점에 위치 하게 된다. 일반적으로 천체는 2 체나 3 체만으로 이루어져 있지 않으므로 이제까지 다루어 온 이론들은 사실 잘 맞지 않는다. 여기서 생기
는 차이는 뒤에서 다루게 될 섭동론으로 풀어나가게 된다. 그렇 지만 아주 간단한 계일 경우는 제한 3 체 문제로도 풀 수는 있다. 3.1.4 천체물리학에의 응용 앞에서 기술한 영 속도 곡선이 실제로 많이 응용되는 분야가 쌍성의 진화 연구와 모델의 구성이다. L1 이 존재하는 첫째 경우 를 보면 내부의 영 속도 곡선이 바로 천문학에서 말하는 로슈로 브 (Roche lobe) 가 되는 것이다. 그리고 두 개의 질점이 위치하는 곳에 바로 쌍성들이 위치한다고 생각하면 하나의 쌍성계가 성립 된다. 먼저 두 별의 질량이 비슷한 경우는 한 쪽의 별이 조금 더 일 찍 전화를 해서 물질들이 그 주위를 둘러 싼 로슈로브를 채우면 더이상 갈 곳 없는 주성의 물질들이 L1 점을 통해 반대편의 반성 으로 흘러들어간다고 천체물리학자들은 생각을 하고 있다. 위의 단계에서 별들이 더욱 진화하면 L1 점은 없어지고 물질들 은 두 별의 합쳐진 로슈로브를 가득 채워 땅콩 같은 모양이 되어 버린다. 쌍성들이 이 상태가 되면 표피는 하나가 되고, 핵은 2 개 가 되어 양쪽 별의 중심에서 동시에 핵반응이 일어난다. 두 개 의 핵 연소 단계 (2 core burnin g ) 에 서 별들이 진화를 계 속 하면 이제 대원과 로슈로브가 만나 L2 점이 생기게 된다. 이 단 계에 이르면 이 L2 점을 통해 질량 방출이 일어난다. 이 방출된 물질들은 우주 공간으로 퍼져나가는데 쌍성계가 회전하므로 둥글 게 퍼져나가게 되며, 물질들이 다 방출되고 나면 중심은 핵만 남 아 백색왜성이 되고 오랜 시간이 지나면 방출된 물질들이 쌍성 주위를 도넛 모양으로 둘러싼 형태로 퍼져나가게 된다. 지금까지 기술한 모델들이 바로 행성상 성운의 기원과 전화를 설명하는 이
론 중의 하나이며, 행성상 성운의 중심부에서 백색왜성으로 이루 어진 쌍성이 발견된 경우가 있어 위의 이론을 뒷받침하고 있다. 위의 경우는 두 별의 질량이 비슷해서 전화 속도가 그다지 많 은 차이가 나지 않는 경우이지만 한 쪽이 매우 큰 질량을 갖고 있어 전화 속도가 반성에 비해 아주 빨라, 먼저 고밀도의 별로 되어버리는 경우는 이야기가 좀 달라전다. 이제 주성은 아주 빨 리 전화해 백색왜성이나 중성자성, 블랙홀 같은 고밀도의 별이 되고 반성은 현재 거성으로 전화를 해 로슈로브를 가득 채우고 있다고 하자. 거성의 물질들은 더이상 갈곳이 없으므로 반대편 고밀도의 주성으로 L1 점을 통해 흘러들어가 그 주변을 회전하며 가스 원반을 만들고 결국은 주성으로 떨어진다. 이것이 신성과 X 선 별의 기초적 모델이다. 신성은 주성이 백색왜성이며, 옆의 별로부터 물질이 유입되어 Accre ti on 에 의해 백색왜성의 표면에서 중력 에너지가 열 에너 지로 바뀌면서 신성 폭발을 일으킨다. 반면에 X 선 별은 주성이 중성자성 또는 블랙홀 상태이며, 유 입 물질의 운동 에너지가 Accre ti on 에 의해 더 큰 중력 에너지 가 열 에너지로 바뀌면서 X 선이 나온다고 생각된다. 3.2 3 체 문제 3.2.1 운동 방정식 이 절에서는 세 질점 ml, m2, m3 로 이루어져 있는 3 체계에 대해서 생각해 보기로 하자. 만약 이 세 질점이 상대적으로 무시 할 수 없을 만큼 커다란 질량을 가지고 있다면 이 계는 앞 절에
서와 같이 제한 3 체 문제로써 단순화하여 나타낼 수 없다. 이 경우 각 질점에 작용하는 힘은 틀= k2m2_ frl1—2 f+ k2m3 _flr1二3 丙 d;『 = k2m1.. fril—2 f+ k2m3_ fl—r233 쥰 3-47 dd 넛t 2 =k2m1 芹rf ~3 + k2m2 ..fri 검― 丙 의 형태로 표시할 수 있으며, 여기서 丙는 각 질점의 위치 벡터, r;,;는 m i와 mj 사이의 거리, k2=G 의 값을 나타낸다. 일반적으로 3 체 문제에는 모두 18 개의 운동 방정식이 존재한 다. #u 가 3 개, 六 u 가 3 개 해서 6N 개의 방정식이 있는데, 여기 서 N, 죽 질량을 가진 물체의 수가 3 이므로 18 개가 되는 것이 다. 그렇지만 적분상수가 12 개밖에 되지 않아 방정식의 개수에 비해 6 개가 모자라므로 일반 해롤 구할 수가 없으며, 특수한 경 우에 있어서만 해를 구할 수가 있다. 다시 말해서, 임의의 속도 와 좌표가 주어졌을 때 2 체에서는 원, 타원, 포물선, 쌍곡선과 같은 일반화된 공식이 나오지만, 3 체의 경우에는 일반화된 공식 이 나오지 않는다. 이와 같은 3 체계에 있어서 세 질점에 작용하는 인력은 질량 중 심 좌표계에서 다음과 같이 각 요소에 대해 수식화하여 나타낼 수 있다. rJk = (x j -Xk) 도 (yj— Yk)2+ (zj -zk) 라 j=I=k 3-48 一ox」k ―rjk= -스二귬k 묘 3-49
mj dd2tx2 j _ = aaxuj 3-50 mj dd2ty2 j =_ aayuj 3-51 mj dd2tz2 j = _ —aazuj 3-52 여기서 U=k2( mlm2 + mlm3 + m2m3 )의 값을 의미한다. 이 경 r12 r13 r23 우 이 계에 작용하는 모든 힘의 합은 0 이 되며, 다음과 같은 형 태로 표시할 수 있다. 꼬ax1+ • 꼬ax2 +• a꼬x3 =O 3-53 ~ m j틀 =0, j= l, 2, 3 3-54 이때, 식 3-54 를 두 번 적분하면 아래와 같은 식이 얻어지고, ~ mj x j= Ai t +B1 3-55 나머지 경우에 대해서도 비슷한 과정으로 풀면 다음과 같은 결과 를 얻을 수 있다. ~ mj yj= Ai t+B 2 3-56 2 mj z j= A3t + B3 3-57 또한, 이 계에 있어서 각 질점들의 총 각운동량은 항상 보존되므 로 이 관계로부터 ~ m j (Y충 _z충 )=CI 3-58 2 m J( z총 _x 충 )=C2 3-59 ~ m j (x 뿔_y총 )=C3 3-60
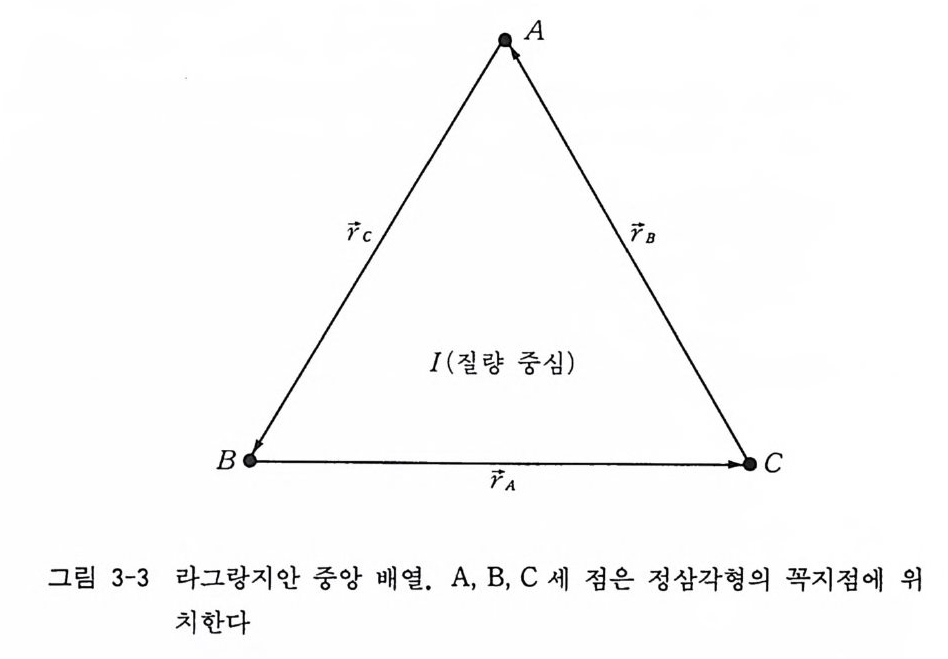
의 식을 얻어낼 수 있다. 이 식은 면적 적분이라고도 불린다. 마지 막으로 식 3-50, 식 3-51, 식 3-52 에 각각 x , y , 之 룰 곱하여 세 식을 더해 주면 따 터로+Jljjij+.Zj之.j)=~a(x꼬j •x• ,j +• aayuj .y,' J• a+zj 꼬 -J이I =d뿌t 3-61 의 관계가 나타나며, 위의 식을 오일러 적분함으로써 다음과 갇 은 에너지 적분식을 얻어낼 수 있다. +2 ~ m j[(치탸(yJ 2+ (江 ]=u+c 3-62 이제까지의 과정을 통해 모두 10 개의 적분상수가 나타나며, 종 속변수 중 하나룰 독립변수처럼 사용함으로써 적분상수가 또 하 나 나오고, 교점 (node) 을 제거함으로써 마지막으로 적분상수 하 나가 나온다. 지금까지 나온 적분상수를 다 더하면 그 수가 12 개 가 되지만, 위에서 기술한 바와 같이 3 체에서는 적분상수 6 개가 부족하여 그 일반 해를 얻을 수 없다. 따라서 2 체의 경우와 같이 궤도의 형태를 알아낼 수는 없고, 다만 초기 조건 (3 체의 좌표, 속 도)이 주어진다면 수치적으로 그 다음 임의의 시간의 해를 구할 수있다. 3.2.2 라그랑지안 해와 오일러 해 라그랑주는 질점들 사이의 상호 거리가 일정한 3 체 운동을 발 견했으며, 오일러는 질점들 간 상호거리의 비가 일정한 해를 발 견하여 라그랑주의 해를 확장시켰다. 이 경우 3 체가 받는 가속도 는 모두 질량 중심을 향하게 되며 각각의 크기는 해당 반경 벡터
 I( 질량 중심)
I( 질량 중심)
에 비례하기 때문에 이러한 질점들의 배열 상태를 중앙 배열이라 고부른다. 위와 갈은 경우에 해당하는 가장 간단한 것이 정삼각형의 형태 로 배열되어 있는 경우이다. 세 개의 물체가 각각 정삼각형의 꼭 지점에 위치하고 있다고 가정하자. 이 경우 질점들간의 거리는 모두 일정 (rA=ra=rc) 하며, 이들의 운동 방정식은 다음과 같이 나타낼 수 있다. 열[= —GM fjr1-3 기 ={A, B, C,} 3-63 이 방정식들은 전체 질량이 M 인 2 체계에서의 상대 운동의 벡터 가 r12 로 주어지고, 만약 세 질점의 상호 거리 rA, rB, re 가 같 은 2 체 회전을 한다면, 이 3 체계는 정삼각형 배열을 유지할 수
 A
A
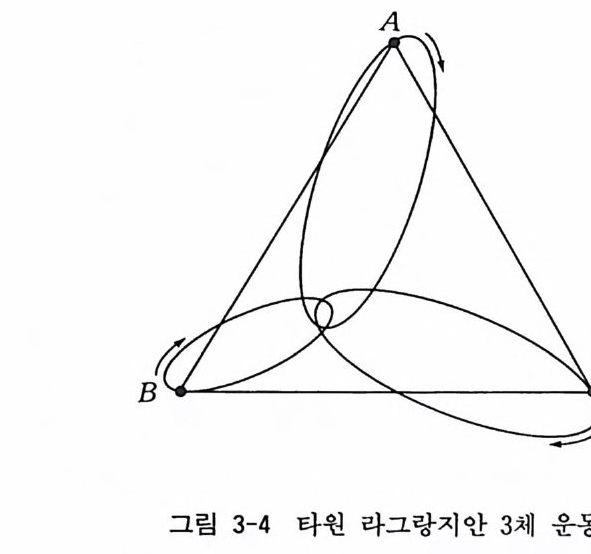
있을 것이다. 이 경우 제 3 체는 질량 중심을 축으로 동일 평면에서 같은 방 향으로 갇은 이심률, 같은 주기, 같은 근지점 통과 시각, 같은 인력 초접을 갖는 궤도를 그리게 된다(그립 3-4). 이 운동을 혼 히 라그랑지 안 3 체 운동이라고 부른다. 상호 거리비가 일정한 또 다른 해로는 동일선상 중앙 배열이 있으며, 이 경우 오일러 운동에서는 3 체가 질량 중심에 위치한 동일 인력 초점을 가지는 세 개의 대응 케플러 궤도를 그린다. 이 운동은 물론 세 개의 초기 평행선과 대응 속도, 대응 초기 가 속도가 필요하며, 이것으로부터 다음의 관계가 나오게 된다. d2~rf/l dt2 _= d2r i/fd t2 =_ d2f i/fd t2 3-64 乃乃 이러한 관계를 상대 평형의 조건이라고 부른다. 이러한 평형 조건이 성립하기 위해서는 다음과 같은 사항들이
만족해야 한다. A) 조건은 언제나 삼각형을 만족해야 하나 다른 삼각형을 만 족해서는 안 된다. B) m1 fi +m 홉 +m3 fi =O 과 ?d2건 m1 fi +m2 ri +m3 fi )=O 이 항 상 성립하므로 식 4-65 는 단 하나의 조건으로만 나타나고, 두 개 의 조건이 되지는 못한다. C) 각 질점 사이의 차이를 구함으로써 우리는 식 3-64 를 다음 과 갇이 상대 위치만의 항으로 표현할 수 있다. mI m2 m3 r23/r12=x (m1+m2)x5+ (3m1+2m2)x4+ (3m1+m2) 갔 = (m2+3m3)x2+ (2m2+3m3)x+ (m2+m3) d2 7r_1122 / dt2 = d2 7r_2233 /dt2 3-65 죽, m1 과 m3 사이에 m2 가 위치한 그립 3-5 의 동일선상 배열에 대해서는
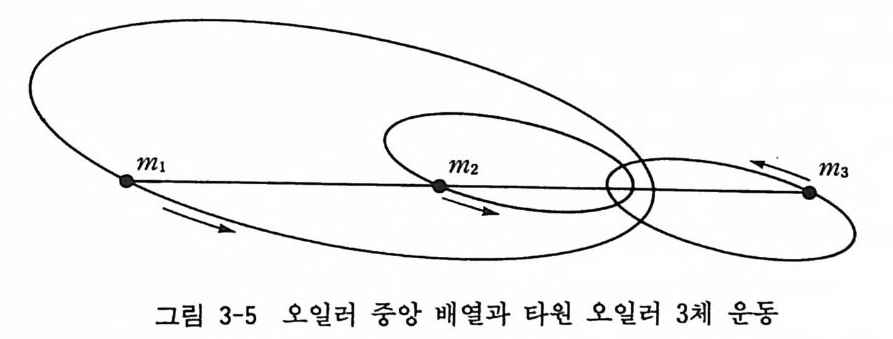 그림 3-5 오일러 중앙 배열과 타원 오일러 3 체 운동
그림 3-5 오일러 중앙 배열과 타원 오일러 3 체 운동
꿉? 23( 六喜)_ m1:f2m 2 ]=占 [ml( 志_六)_ m2g:31n 3 ] 3-66 의 관계가 성립해야 한다. D) 마지막으로 Y13=Y12+Y23 이므로 우리는 상대 평형 조건에 대해 다음과 같은 근소한 비대칭의 표현식을 얻을 수 있다. m3r&(r:3_ r&) + mlr 젊 (d1- r?2) =m2 저 (r&— r김 ) 3-67 식 3-67 은 표현의 단순화를 위해 일반적으로 끄r12 =x ; lrh12 =l+x 잤 (m1+m2) +x4(3m1+2m2) +x3(3m1+m2) =갔 (m2+3m3) +x (2m2+3m3) + (m2+ m3) 3-68 와 같이 바꾸어 표시된다. 이 5 차 방정식은 언제나 단 하나의 양 의 근을 가지며, 따라서 세 개의 주어진 질량들에 대해서는 다른 두 개의 질량들 사이에 위치한 또 하나의 질량에 따라 언제나 단 세 개의 동일선상 중앙 배열이 존재하게 된다. 일반적으로 동일선상 중앙 배열에서 질량 중심의 위치는 세 질 점에 대한 위치만의 함수로 주어지며, 각 질량들 자체와는 무관 한 값을 갖는다. 사실 식 3-68 에서 r1/r12, 죽 [m2+m3(l+x)]/ M은 r1/r12= (x5+3x4+3x3)/(x4+2x3+x 포 2x+l) 3-69 의 형태로 주어지며, 이 식은 더 간단하게 x1 = (x 드 2x] + 17x2) I (저 一 10xg— 7) 3-70
로 나타낼 수 있다. 이 식은 그림 3-5 에서 m1 과 m2 를 가로 좌표 의 (-1) 과 (+1) 의 위치에 가져다 놓을 경우 m2 의 가로 좌표 X2 와 질량 중심의 좌표 x1 사이에서 성립하게 되며, 이 경우 xl 은 X2 가 -1 부터 +1 까지 증가할 때 十 1 에서 ― 1 까지 감소하는 값을 갖는다. 3.3 N 체 문제 지금까지 4 장의 앞 절들에서 2 체와 3 체 문제에 대해 생각해 보 았다. 그러나 우주 공간은 2 개 또는 3 개의 물체만으로 구성되어 있지는 않으며, 수많은 물체들의 상호작용으로 이루어져 있다. 이 절에서는 이러한 많은 물체들의 상호작용으로 이루어전 다체 문제에 대해 알아보기로 하자. 다체 문제는 최초로 뉴턴에 의해서 정확히 공식화가 되었다. 일반적으로 어떤 시간에서의 위치, 속도, 질량이 주어지면, 이것 울 바탕으로 미래의 시각의 위치와 속도를 계산할 수 있다. 그러 나 여기서 물체의 모양이나 그 내부를 이루는 성분까지도 고려하 여 준다면, 그것은 지구-달-태양 문제와 같이 더 복잡해지게 된 다. 이러한 이유로 지난 3 세기 동안 수많은 저명한 천문학자나 수학자들은 우주 공간의 물체를 질점으로 취급하여 이러한 다체 문제를 다루어 왔다. 보통 다체 문제는 3 체 문제나 2 체 문제보다 매우 복잡하며, 상 당히 근접한 두 질점의 상호인력에 의해 다양하게 변하는 중력장 에서 이들은 완전히 새로운 형태의 궤도를 갖게 되므로 우리는 이러한 충돌 과정도 설명할 수 있는 일반적인 식이 필요하다. 실제로 다체 문제에 관련된 몇 가지 일반적이고 유용한 식이
있지만, 그것들은 그들의 운동이 이미 알려진 적분 방법으로 구 체화됨으로써 가능한 것이었다. 이러한 계산 과정에 의해 나오는 적분상수를 오일러 적분상수라고 한다. 3 체 문제에 관한 특수 해 는 라그랑주에 의해 발견되었는데, 이 해는 초기 조건 가운데 어 떤 조건으로부터만 얻어졌으며 그 후 제한 3 체 문제의 연구에 있 어서 괄목할 만한 전보가 나타났다. 푸앵카레 (Po i ncare) 의 신기원을 아룩한 많은 연구들은 대부분 이 바로 이 문제를 연구한 것이었다. 지구와 달 사이의 우주선의 문제를 이 문제에 적용할 수 있고, 태양계의 경우는 행성간 상호 인력이 태양에 비해 무시될 정도로 작으므로 모든 행성은 태양 주위를 거의 완벽하게 타원 궤도로 움칙인다고 생각할 수 있기 때문에 이러한 2 체 근사로 행성 운동을 이끌어 낼 수도 있다. 이 러한 2 체 문제의 해에서 궤도 요소는 일정하게 유지되며, 만일 궤도 요소가 상호인력에 의해 변한다 하여도 그들의 변화를 미분 방정식으로 나타낼 수 있고, 또한 풀 수도 있다. 이렇게 궤도 요소로 나타낸 결과는 더욱 정밀한 근사를 얻는 데 사용할 수 있다. 실제로 이러한 방법은, 어렵긴 하지만 매우 빠르게 수령하여 3 차 근사룰 넘어가는 경우는 매우 드물다. 이렇 게 주어진 시간 동안에 잘 맞는 해석적 표현을 우리는 일반 섭동 론이라고 부르며, 이것을 이용하여 행성계의 과거나 미래의 상태 룰 유추할 수 있다. 이처럼 일반 섭동론은 인공위성, 목성에 의 해 교란받는 소행성군이나 행성의 위성 등의 운동에 적용 가능하 며 천체역학에 있어서 매우 강력한 도구이지만, 임의의 건 시간 간격에 적용할 경우 오차의 누적으로 인해 부적합한 결과가 나올 가능성이 있다. 다체 문제에 대한 또다른 접근 방법은 특수 섭동론을 이용하는 것이다. 이 방법은 고속 컴퓨터가 나오기 전까지는 대부분의 천
체역학 연구자들이 이용한 방법으로 계산을 할 때마다 운동 미분 방정식을 수치 적분해야 하는 어려움 때문에 과거에는 별로 쓰이 지 않았다. 그러나 이 방법은 물체의 개수나 궤도에 구애받지 않 고 어떠한 계에도 적용이 가능하다는 큰 장점을 가지고 있으며, 오늘날 모든 종류의 천체역학적 문제에 적용시킬 수 있다. 일반적으로 섭동론은 섭동 주기에 따라 크게 단주기와 장주기 의 주기적 섭동, 영년 섭동으로 나눌 수 있다. 일반적으로 기준 궤도의 교란 죽 회전 주기 동안 반복되는 교란을 주기적 섭동이 라고 한다. 보통 이러한 섭동은 정확히 같은 시간에 발생하지 않 으므로 주기적 섭동은 장기간에 걸쳐 일정하게 발생하게 되는데, 이러한 섭동 주기의 변화를 장주기 섭동이라고 한다. 이와 유사 한 것으로 영년 섭동이 있으며, 이것은 장주기 섭동과 유사하지 만 근지점의 이동이라든지 승교점의 역행과 같은 시간에 따른 변 화를 유발시킨다는 접에서 차이룰 갖고 있다. 장주기 섭동과 영 년 섭동은 모두 섭동 주기에 비해 관측할 수 있는 시간이 짧기 때문에 많은 경우에 있어서 이들을 구분하는 데 어려움이 따른 다. 위에서 언급한 섭동론적인 이유 때문에 우리는 N 체 문제를 다 루는 데 있어서 소수 개체 (few -body ) 문제와 다체 문제를 구분 해서 다루어야 한다. 태양계의 경우 일반적으로 소수 개체 문제 로서 다룰 수 있으며 이때 궤도들은 정확히 계산되고, N 이 크지 않기 때문에 통계적 혹은 정역학적 접근을 시도할 필요가 없다. 그러나 항성계의 경우는 다체 문제를 다루기 때문에 앞서 언급한 통계적 방법을 이용해야 한다.
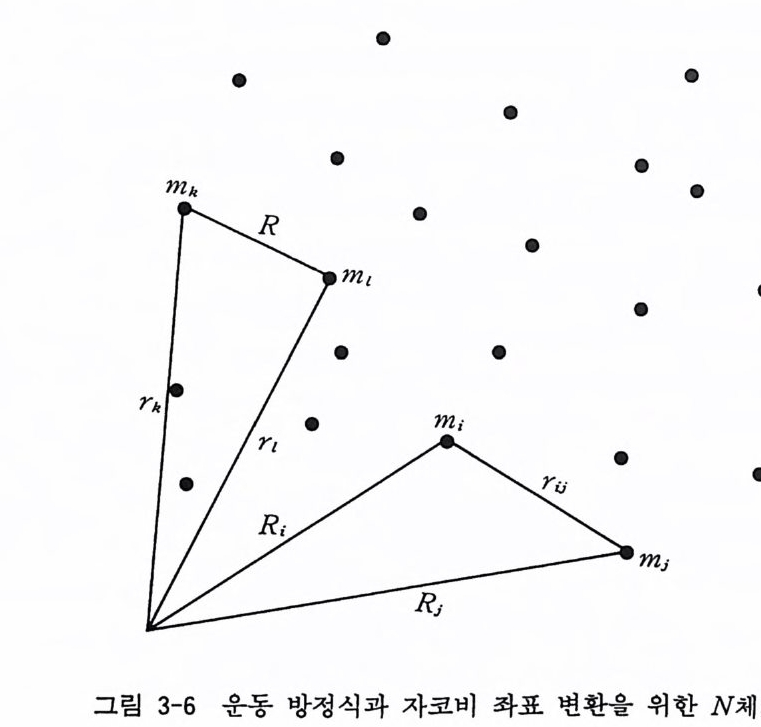
3.3.1 운동 방정식 질량 ni;(i=l, 2, …, 1 t)인 n 개의 입자들로 구성되어 있는 다체계에 대해 생각해 보도록 하자. 이들의 운동 방정식을 세우 기 위해, 그립 3-6 에서처럼 등속 운동하는 원점 O 로부터 동경 벡터 R를 정의하면 상호간 동경벡터는 r ij에 의해 다음과 같이 표현할 수 있다. rij= R一 j— R-,. 3-71 따라서, 원점 0 에 대한 각 질점들의 운동 방정식은 뉴턴의 운동 법칙과 중력 법칙에 의해
 mk\ • •m , • • • • •• •• ••
mk\ • •m , • • • • •• •• ••
m,E,=G j$= o m,r뿐 ij 7u (j수i, i=l, 2, …, n) 3-72 의 형태로 나타낼 수 있으며, 여기서 ru 는 m i에서 m j로 향하 는 거리 벡터, G 는 중력상수를 의미한다. 죽, ru=-r ji 3-73 의 관계가 성립한다. 식 3-72 에 주어전 각 질점의 운동 방정식을 n 개의 질점들에 대해 모두 더하여 주면 이 식의 우변의 값이 서로 상쇄되어 ~n m;R노; =O 3-74 i= l 의 형태로 나타낼 수 있으며, 이것은 이 계에 작용하는 전체 합 력이 0 이 됨을 의미한다. 또한, 식 3-72 에 R 를 벡터곱하여 n 개 의 방정식을 모두 더하면 n _ 츠 i~= I m;R;X R;=O 3-75 의 식을 얻을 수 있으며, 이 식을 통하여 2 장에서 설명한 바와 같이 다음과 갇은 각운동량 보존의 법칙을 이끌어 낼 수 있다. 2n mi R_ 2. X R~i = h- 3-76 i= l 이 식을 면적 적분이라고도 하며, 여기서 E는 상수 벡터를 의미 한다.
3.3.2 항성 역학에의 응용 일반적으로 항성계와 같은 다체계에 있어서 질량 중심을 지나 고 각운동량 벡터 E와 직교하는 평면을 불변면이라고 정의한다. 이 경우 앞 절에서 보았듯이 이 계의 각운동량의 합은 0 이 되어 계에 영향을 주는 의부 힘이 없는 것과 같으므로 총 각운동량은 보존된다고 할 수 있다. 일반적으로 각운동량은 궤도 공전 운동 과 자전 운동에 의해서 생기는데, 모든 물체가 연결되어 있지 않 고 강체이며 구형의 모양인 동시에 균질한 밀도를 갖는다고 가정 하면 자전은 어디에서나 일정하므로 공전에 의한 각운동량만을 고려해 줄 수 있다. 이런 경우에 이 계는 공전 궤도의 각운동량 벡터와 직교하는 불변면을 갖게 된다. 그러나 이러한 조건을 만 족하지 않는다면 궤도 운동에 의한 각운동량과 자전에 의한 각운 동량의 상호 교환에 의해 생긴 세차 운동과, 조석 마찰에 의한 효과에 의해 불변면온 일정한 것이 되지 않는다. 그러나 행성계 에는 이들 조건이 거의 만족되므로, 태양계에는 불변면이 존재한 다고 할 수 있다. 이 평면온 승교접 적경이 107° 이고, 궤도 기울 기가 1. 35° 인 궤도 요소를 갖는다• 이제 태양계에서 무시할 수 있을 정도로 작은 질량을 갖는 혜 성과 같은 천체의 운동 방정식에 대해 생각해 보자. 만약 태양 중심을 원점이라고 하고 7 가 혜성의 위치 벡터라고 하면 다음 과 같은 식을 얻을 수 있다. f =Mk: 강 m;k2(~二 ; |3 을) 3-77 여기에서 M 은 태양의 질량이고 우변의 합은 태양으로부터 멀어 지는 순서에 따른 9 개 행성의 질량의 합을 나타낸다. 혜성이 목
성 이의의 다른 행성에 근접하지 않는 한 우변에서 가장 큰 기여 롤 하는 행성은 ms 죽, 목성이며 다론 행성의 영향은 상대적으 로 작다. 따라서 우리는 식 3-77 을 이론적으로 단순화하여 나타 낼 수 있다. 혜성이 명왕성에 근접하지 않는다면 우리는 직접, 간접적인 영향이 매우 작은 명왕성(i =9) 을 고려하지 않아도 된 다. 그러나 수성의 경우에는 명왕성과는 다르며, 이 경우 직접적 영향은 무시할 만 하지만 간접적인 영향이 매우 크기 때문에 7 가 커져도 그 영향이 줄어들지 않는다. 수성에 의한 간접적인 영 향은 다음과 갇이 나타낼 수 있다. -Mm+m1m1k 21= r. 걸:1..r =l r 1.:.. , 3-78 여기에서 斤'은 수성과 태양의 질량 중심의 위치 벡터이다. 이와 같은 영향의 크기를 고려하면 식 3-77 은 다음과 갇이 간 단히 하여 나타낼 수 있다. 몰 7 —fi') +Mk2:言 m:k2 | ::: 13 섭 m 싶을 3-79 이 식을 보면 부분적으로 간접적인 영향을 제거함으로써 기준계 가 변환되었음을 알 수 있다. 죽 영향을 제의한 행성과 태양 간 의 질량 중심이 원점으로 바뀌어 나타나 있다. 실제로 혜성에 대 한 섭동을 계산할 경우 내행성 4 개(지구형 행성)의 직접적 영향 은 그 크기가 매우 작기 때문에 무시할 수 있다. 또한 이들 행성 의 간접적 영향은 그들과 태양 간 질량 중심의 원점 이동에 의해 고려된다. 그러나 태양계와 같은 행성계가 아닌 항성계롤 다루는 경우에는 각 성분별을 함부로 무시하거나 그 영향을 제거할 수
없기 때문에 그 방정식의 형태가 매우 복잡해전다. 이러한 이유 때문에 항성계 분야의 천체역학은 다른 분야에 비 해 상대적으로 매우 늦게 발전했다. 이런 분야의 역학을 항성 역 학이라고 하는데, 여기에서는 주로 구상 성단과 갇은 대칭적인 큰 규모의 성단 구조나 진화를 연구하는 것이다. 이러한 성단의 구조나 역학을 이해하고 모의 실험하기 위한 유일한 수단이 N 체 운동 방정식을 수치적으로 적분하는 것이며, 이것을 위해 빠른 컴퓨터가 필요했던 만큼 이 분야의 발전도 늦어질 수밖에 없었 다. N 체의 경우 운동 방정식은 다음과 같이 나타낼 수 있다. m ,! 츄•• = _ Gm 조l=n 1 m| lf '(i1-7 r_- ;1 컵13) ' n=l, 2, …, N 3-80 l*n 이 식은 일반적인 방법으로는 풀 수 없기 때문에 우리는 거시적 인 관점에서 이 식을 풀어야 한다. 통계역학이나 열역학의 경우 에는 N 체의 위치, 속도에 대한 6 개의 값이 모든 시간마다 필요 하지 않고 밀도나 압력 , 엔트로피 (ent ro p y) 등과 갇은 값 중 어 느 한 가지만이 필요하게 된다. 여기에서는 통계역학에서 이 문제를 푸는 두 가지 방법에 대해 생각해 보기로 하자. N 체 문제를 푸는 한 가지 방법은 몬테카를 로 (Mon t e Carlo) 방법을 이용하는 것이며, 다론 한 가지는 유체 역학 또는 운동학적 이론을 이용하는 것이다. 구상 성단의 경우 룰 생각해 보면 그 안의 모든 별은 두 가지의 서로 다른 힘을 느 끼며 궤도 운동을 하게 된다. 한 가지 힘은 계 전체를 유지하며 완만하게 변해가는 가장 보편적인 힘으로 구상 성단 내의 모든 별은 항상 이 힘의 영향을 받는다. 또한, 한 별이 이 계에 속한 또 다른 별의 근처를 지나가게 되면, 그 별은 쌍곡선 궤도를 그
리며 탈출하게 되는데 이는 바로 충돌에 의해서 나타나는 현상이 다. 이 사전은 성단 전체를 가로지르는 데 걸리는 시간인 횡단 시간보다도 매우 짧은 시간 동안에 일어나며, 이때 주고받는 에 너지는 성단 전체가 은하 중심 주위를 회전하는 동안 주고받는 에너지보다 훨씬 큰 값을 갖는다. 이러한 2 체간 상호작용(충돌) 은 불규칙하게 발생하며 속도나 최근접 거리와 같은 매개 변수로 써 그들 사이의 상호작용을 설명할 수 있다. 바로 이와 같은 사실에 몬테카를로 방법이 적용되었다. 일반적 으로 성단 내의 모든 별은 스스로의 궤도를 반드시 지키지는 않 으므로, 가상의 실험 별을 임의로 2 체 충돌 과정에 있게 하여 이 러한 N 체 문제를 해결하려 하였다. 만일 이러한 임의의 상호작 용이 이론적으로 계산한 것과 일치한다면 성단 전체를 수치적으 로 설명할 수 있게 된다. 이러한 시도는 1970 년대 미국과 유럽에 서 있었지만 고작 성단 내부의 일부에서만 일치하였다. 통계역학적 혹은 운동학적 이론을 이용한 접근은 해석적인 수 식을 사용해야 하므로 실질적으로 매우 어렵다. 이러한 유체역학 적 모델들은 전화를 알아내기 위한 정역학적 논증과 안정성 분석 울 위한 열역학적인 이론을 이용한 것들이다. 이러한 종류의 계 산은 그럴듯해 보이지만 중력 법칙의 특별한 특성 -1/ 군 법 칙에 따르지 않음一—때문에 물리적인 근거는 없는 것이다. 3.3.3 N 체 계산 N 체 계산울 하기 위해서는 우선 대용량 메모리의 컴퓨터와 운 동 방정식의 적분 방법, 그리고 초기 조건들이 있어야 한다. 따 라서, 이러한 N 체 계산은 컴퓨터가 등장함으로써 비로소 1960 년 대부터 시작되었다. 비록 1800 년대 후반 Bruns 와 Po i ncare 가 이
미 N 체 문제를 해석적으로 풀기는 했지만, 식 3-80 을 수치 적분 하는 방법이 더 빠르고 단순하므로 오늘날에는 해석적인 방법보 다는 이러한 수치적인 방법이 널리 쓰이고 있다. 서로 다른 질량 과 초기 조건을 이용한 수치 적분을 통해 우리는 어떤 계의 중력 장 안에서의 운동을 이해할 수 있으며, 만일 그러한 계의 중요한 일면을 수치 적분 방법으로 기술할 수만 있다면 실제 성단의 해 석도 가능할 것이다. 하지만 이러한 수치 적분 방법은 언제나 유용한 것은 아니며, 사용하는 컴퓨터의 기억 용량과 계산 시간의 제한 때문에 N값에 제한울 받게 된다. 일반적으로 계산 시간은 (NX 횡단 시간)만큼 요구되고, 횡단 시간 당 계산 횟수는 N2 정도임이 알려졌다. 따 라서 초기의 수치 실험에서는 고작해야 50 개 미만의 별들에 대해 서만 계산울 했었으며, 최근에 들어서는 컴퓨터의 발전으로 3 차 원 공간에 서 500-1000 개 정 도, 2 차원 에 서 는 104-1 한개 정 도의 계 산이 가능해졌다. 식 3-80 을 Rung e -Kutt a 방법으로 적분하는 경 우 두 가지 어 려움에 직면하게 되는데, 그 중 가장 큰 어려움은 우변의 합을 계산하는 데 있어 CPU 시간이 많이 소요되므로 계산시 비용이 많이 든다는 점이다. 이러한 단점은 좌변의 가속도에 대해서 급 수전개하여 계산함으로써 해결할 수 있다. 반면에 두번째 어려움 은 이 수치 적분을 적분 시간 간격의 크기와 직접 연결시켜 계산 하여야 한다는 점에서 나타난다. 보통 성단 전체가 전화 혹은 이 완되는 데 걸리는 시간 f relax 는 횡단 시간 !cross 보다 N 배 정도 길 며, 횡단 시간은 충돌하는 동안에 걸리는 시간 t coI1 보다 N 배 정 도 길다. 따라서 N 이 아주 커지게 되면 이 시간들 사이에는 tre Iax> tcr oss> tcoI I 3-81
과 같은 부등식이 성립하게 된다. 일반적으로 성단의 전화는 t r eIax 의 범위에서 일어나고, 별들의 섭동에 의한 변화는 t cou 의 범 위에서 일어난다. 이 경우 계산 시간을 줄이기 위해서는 !cross 의 단위로 시간 간격을 맞추어야 하므로 세밀한 상호작용은 자동적 으로 무시되며 이러한 경우 한 번의 충돌은 여러 번의 충돌을 대 표하게 된다. 지금까지 위에서 두 물체가 충돌하는 경우에 대해서 살펴보았 으며, 이제 이것을 3 체 충돌의 경우로 확장해 보기로 하자. 만일 두 쌍의 별이 서로 멀리 떨어져 있다면 f cross 시간 동안 나머지 별 둘에 의한 조석력에 의해 분리될 것이므로, 따라서 성단 전체의 역학에는 중요한 영향을 미치지 않는다고 볼 수 있다. 그러나 매 우 근접하게 쌍을 이룬 쌍성계의 경우에는 이들이 충돌할 때 상 대별의 운동 에너지를 흡수하고, 더욱이 3 체 충돌에 의해 만들어 진 다중성계의 경우에 제 3 체는 에너지 보존법칙에 따라 운동 에 너지를 얻게 될 것이다. 따라서 제 3 체는 이 과정에서 성단을 이 탈할 수 있게 되므로 근접된 쌍성계는 성단의 역학적 전화에 상 당한 영향을 미친다. 이러한 문제에 대한 해를 구하기 위해서는 더 짧은 적분 시간 간격을 사용해야 하지만 그만큼 계산 시간이 오래 걸리게 되므로 바람직하지 않다. 뒤에서 자세히 언급하겠지만 식 3-81 의 부등식과 같은 관계 때 문에 생기는 어려움-두 천체 간의 거리가 거의 0 이 되는 경 우, 죽 접촉 충돌하는 경우에 수학적으로 특이점이 발생하게 된 다 ― ――울 극복하는 방법이 있다. 이 방법에는 다음의 두 가지가 많이 사용되는데, 그 중 한가지는 퍼텐셜의 분모에 완화항을 넣어 특이점을 임의로 완화시키는 방법이며, 다른 하나는 시간에 종속 되지 않는 새로운 변수를 사용하여 특이점을 제거하는 방법이다. 이 중 전자의 경우에는 정밀한 계산이 불가능하다는 단점이 있다.
3.4 특이점과 정칙화 N 체 문제를 수치적으로 다루는 데 있어서 컴퓨터의 기술적인 측면 이의에 가장 어려운 문제는 특이점을 어떻게 다루어 주는가 하는 문제이다. 이러한 특이점은 두 질점간의 거리가 가까워져 충돌할 때, 다시 말하면 두 입자간에 중력의 힘보다 조석력이 더 큰 영향을 미치게 될 때에 나타난다. 이렇게 되면 운동 방정식과 같은 미분 방정식에서 분모가 0 에 가까워져 결과값의 정밀도를 떨어뜨리고 계산 시간이 현저하게 늘어나게 된다. 결국 이러한 수치적인 방법으로 N 체 문제를 다루게 될 경우 특이점이 발생하 게 되면 물리적인 상태가 변하기도 전에 계산값에 영향을 줄 수 있게 된다. 이러한 특이점의 문제를 해결하는 방법으로는 연속화 방법과 정칙화 방법이 있는데, 이것과 유사한 방법을 오일러가 최초로 소개하였다. 정칙화의 기본 원리는 다음과 같이 설명할 수 있다. 예를 들어 천체들로 이루어진 성단의 경우를 생각해 보자• 성단 내에는 수 많은 별들이 존재하며, 이들 사이에는 중력뿐만이 아니라 조석력 도 작용한다. 일반적으로 천체들 간의 거리가 어떤 거리 이상이 되면 뉴턴의 중력이 우세하고 어떤 거리 이하가 되면 조석력이 우세해진다. 성단과 같이 많은 천체들의 집합을 다루는 경우 우 리는 보통 천체들을 질점으로 보고 계산울 하는데, 이 가정은 뉴 턴의 중력 법칙에는 큰 무리가 없이 적용이 되지만 조석력을 다 루는 경우에는 질점을 어떻게 다루느냐에 따라 계산 결과값에 큰 차이를 보일 수 있다. 실제 성단에서는 별끼리 충돌하는 경우가 극히 드물지만 여기 에서는 수치적 어려움의 단면을 보이기 위하여 극단적인 예를 들 어 간단히 설명하겠다.
x 를 두 질점간의 거리라 하고 G(m1+m2)=1 아라고 가정하 면, 뉴턴의 중력 법칙에 의한 운동 방정식은 간단히 (皇)=―난) 3-82 와 갇이 쓸 수 있고, 총에너지는 다음과 같이 쓸 수 있다. 불(信 )2= 다 )+c 3-83 식 3-82 와 3-83 의 경 우 만약 x 가 0 에 수령 하면 속도, 가속도 모 두 무한대에 가까워지게 된다. 따라서, 일반적인 수치 적분 방법 으로는 계산이 불가능하므로 이 값을 버려 특이 운동을 고려하지 않는데, 이러한 특이 운동의 제거를 정칙화라 한다. 그러나 실제 에서는 미분 방정식에서 특이점을 없애는 것이 불가능하므로 특 이 운동의 연속화 방법을 이용한다. 연속화 방법을 이용함으로써 수치 적분 처리를 향상시킬 수 있 으므로 결국 정칙화 기술은 해석적인 관점에서는 성공적이라고 할 수 있으나, 수치해석적으로는 그다지 만족스럽다고 할 수 없 다. 운동 방정식에서 발생한 변수의 변형 기술인 정칙화와 연속 화는 독립변수로 시간만을 이용한 것이며, 이는 Sundman(1912) 에 의해 최초로 시도되었다. 실제로는 독립변수와 종속변수 모두 를 변형해야 수치 적분에 더 유용하지만, Sundman 과 같이 식 3-82, 3-83 에 시간의 변형을 가해서도 효과를 볼 수 있다. dr=d~t 3-84 X 위 식에서 정의된 새로운 시간 r 는 실제시간 t뿐만 아니라 거리 변수 x 에도 의존하게 되는데, 이러한 사실은 수치 적분시 적분
간격 결정에 도움을 준다. 식 3-84 에서 x 가 0 에 가까워지면 t도 작아지므로 두 값의 비 는 매우 완만하게 변화하지만, 특이점을 완전히 제거하지는 못 한다. r 를 식 3-82, 3-83 에 도입하여 새로운 속도 dx/dr 를 구하 면 x'=( 총)=(총)(豊)= Xx 3-85 의 형태로 나타낼 수 있다. 식 3_82 에서 x 가 0 에 가까워지면 x· 는 무한대에 가까워지지만 x' 은 완만하게 변화한다. 여기서 식 3-85 의 결과를 이 용하면 식 3-83 은 (x')2=2x+2C균 3-86 으로 다시 나타낼 수 있다. 이 식에서 보면 분모에 있던 x 의 항 이 모두 제거되었으며, 따라서 특이점이 없어져 에너지 방정식의 정칙화가 이루어졌음을 알 수 있다. 만약 이 문제를 1 차원 충돌 모델로 단순화시킨다면 에너지와 운동 방정식의 적분 문제를 완벽하게 기술하여 그 해를 구할 수 있다. 이 경우 2 계 미분 방정식은 다음과 같이 나타난다. x= 틀)(創 =x( 길)i x 혹은 x=xx2+i 2 x 3-87 x:=. x(x_-—xX X' 2+x 크1 =)x0-2 33--88 98 ,2 이 미분 방정식은 해석적으로는
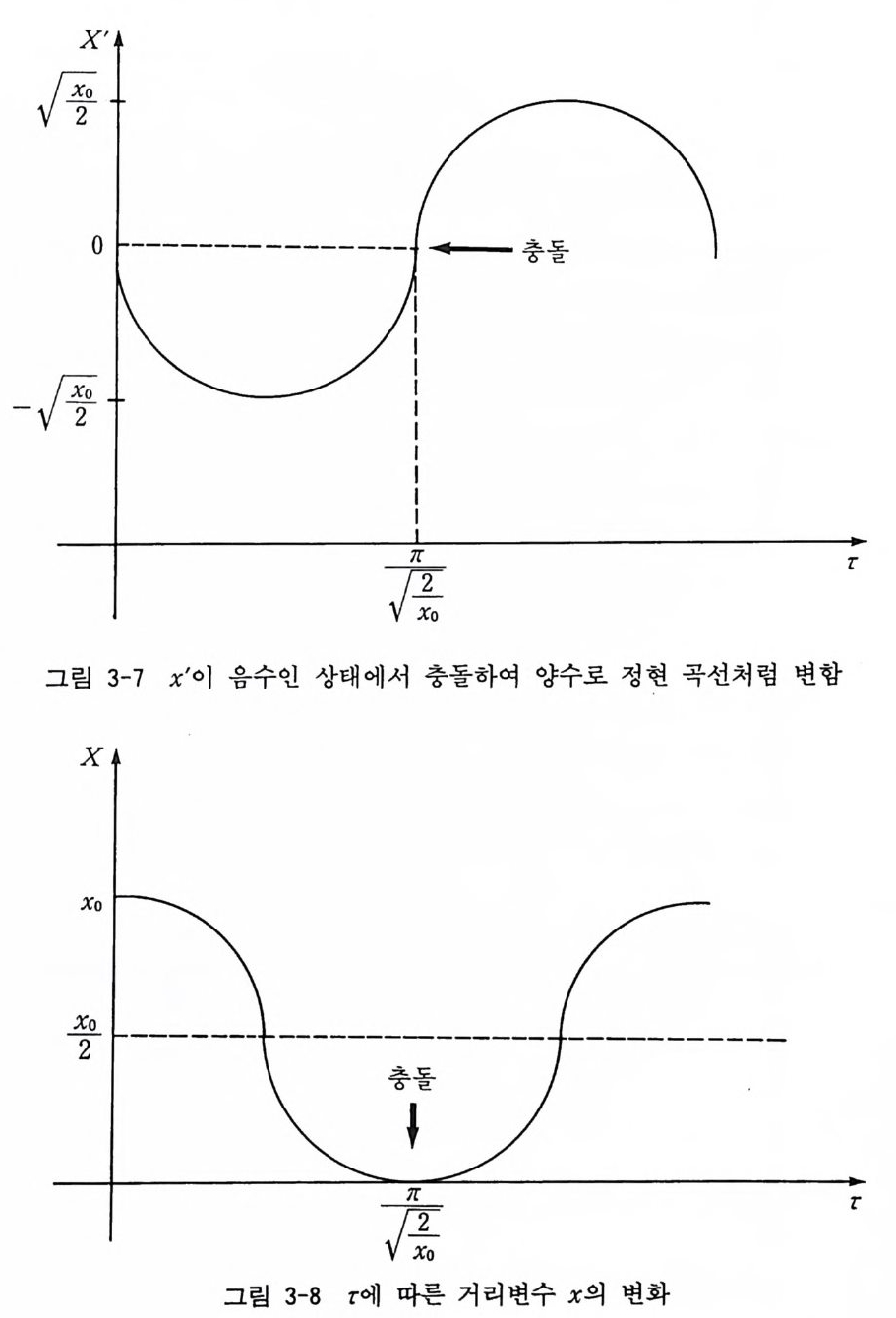
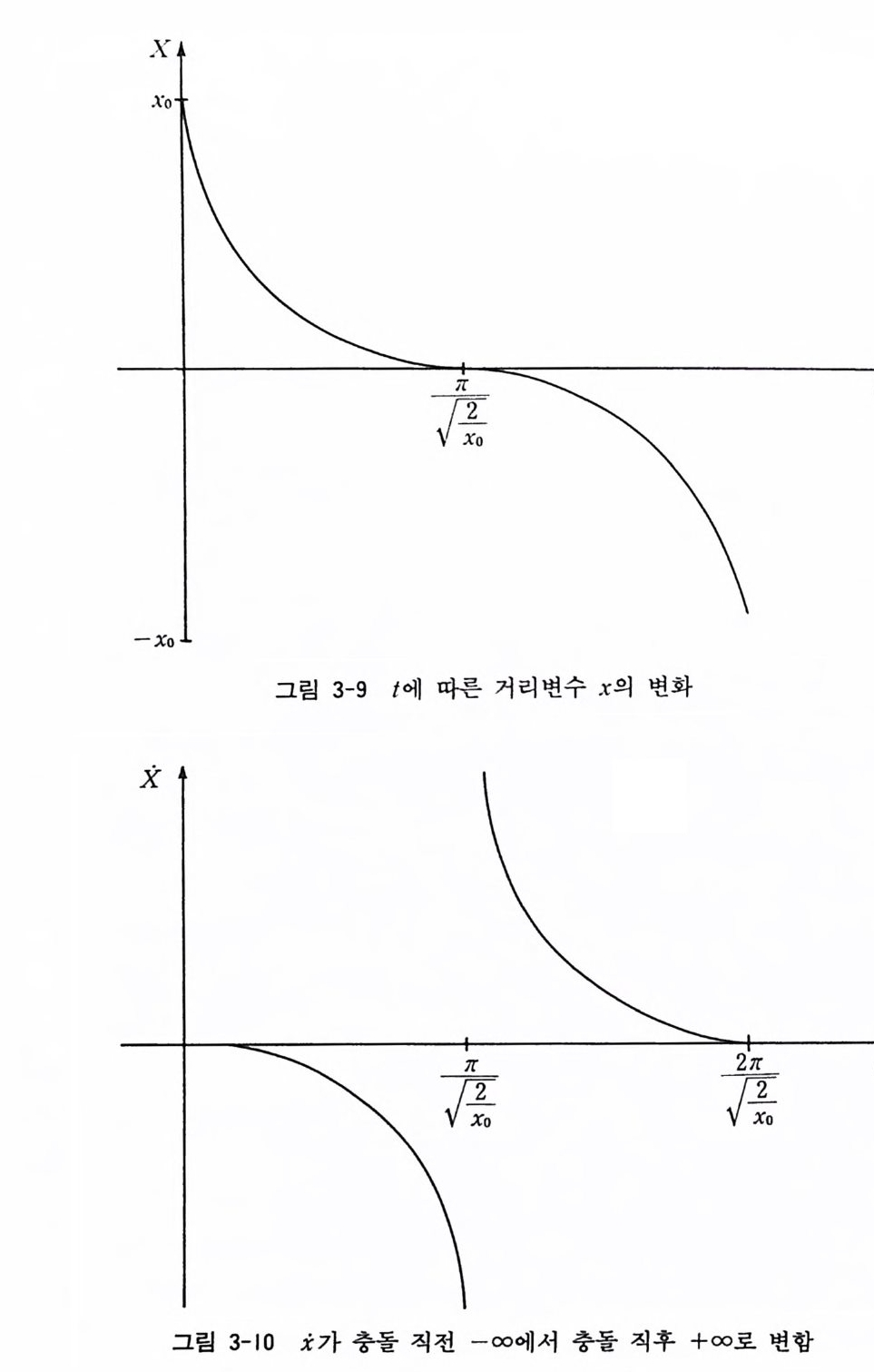
(xXI) 2 =2+2Cx 3-89' 의 형태로 표시할 수 있으므로 표준화되었다고 할 수 있다. 그러 나 2 차원, 3 차원의 경우 식 3-88 에서 (x')Ix 에 대응하는 항의 제 거가 어려우므로, 독립변수와 종속변수의 변환이 함께 필요하다. 식 3-89' 울 식 3-89 에 대 입 하면 x-2Cx— 1= 0 3-90 의 형태로 정칙화된 운동 방정식을 얻을 수 있으며, 음수값의 에 너지와 직선 궤도를 갖고 초기 조건을 만족하는 식 3-90 의 해는 다음과 같이 나타낼 수 있다• x= (풍)〔 l+cos J'G回 3-91 또한, x' 의 r 에 대한 종속성은 식 3-86 의 적분이나 식 3-91 의 미 분에 의해 x'= —詞 sin f(f}r 3-92 의 형태로 표시할 수 있으며, t와 r 의 관계는 식 3-84 을 적분하 여 다음과 갈이 쓸 수 있다. t =£rxdr= (풍 )[r+ /WJ s i n (틀] 3-93 위 식에서 보면 그 형태가 케플러 방정식의 형식을 취하고 있고, 이 경우 (2/xo) r 항은 궤도 운동 방정식에서 이심근접각 (E) 역할 을 하고 있다.
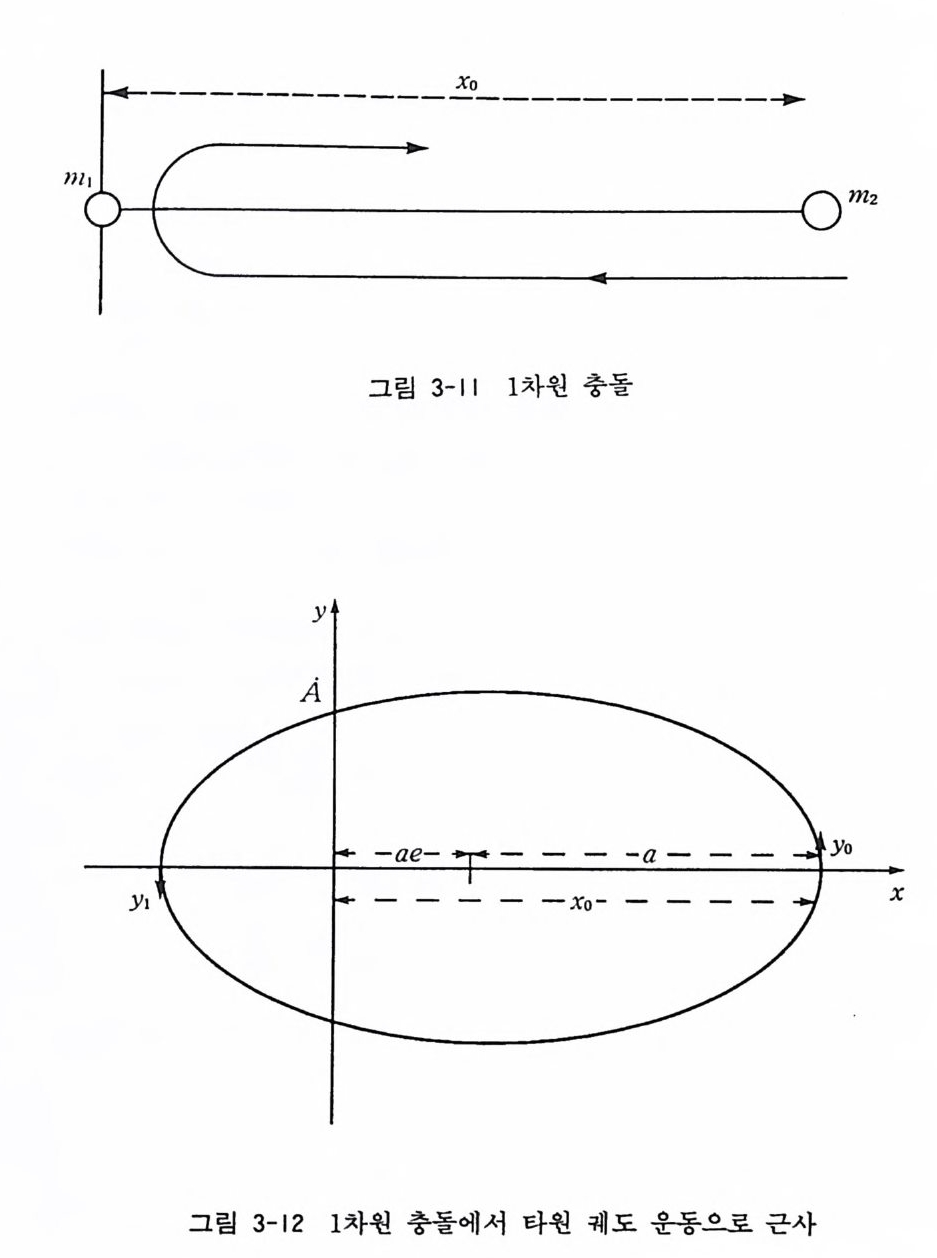
(2/xo) r 항이 7[의 값을 갖는 경 우 x ' 와 r 와의 관계는 그립 3-7, X 와 r 와의 관계는 그림 3-8 , X 와 t와의 관계는 그립 3-9 와 같고, X 와 t와의 관계는 그림 3-10 과 같이 나타난다. 이해롤 돕기 위하여 간단히 1 차원 충돌로서 단순화시켜 문제를 해결해 보자. 그립 3-11 과 같이 질량이 각각 mI, m2 인 두 물체가 거리 Xo 만 큼 떨어져 있고, 초기 속도 i o 가 0 이라고 하자. m2 가 m1 으로 접근하여 이심률 e 가 1 에 가까워져 거의 칙선 형태의 타원 궤도 로 운동하였다고 하면 그림 3-12 와 갇이 나타낼 수 있고, 여기에 서 에너지 적분은 v2= y~이므로 —a1 -=—X1o —y.·.o 2 이고, xo=a(l+e) 과 e= (xo-a)/a 이지만, 길쭉한 타원이 직선 궤도로 되면 xo=2a, e=l, y =O 이고, v2= 었이므로 _X2o __1a =x.o2 의 관계가 성립함을 알 수 있다. 그림 3-12 에서 m1 을 중심으로 한 가장 가까운 곳과 가장 먼 곳에서의 속도를 각각 y1 , y o 라고 하면 y l= 占言三 = ✓ a(1 〔 e) -}귁멋y 1 一 OO Yo= 古言三= ✓ a (1: e) -: 권円 y。 一 。 의 형태로 나타낼 수 있고, 또한 점 A 와 점 B 에서의 속도 XA, YA, XB, YB 는
 X’
X’
 x
x
 -一 _________ 쓰_ __________ +-
-一 _________ 쓰_ __________ +-
XA= — ✓ a(11- e) = _ 갔 B ―니ie -m1 XA=-00 yA = _ ✓ a(11_ e2) = YB 一 lei 니m yA = _CX) 로 표시할 수 있다. 이와 같이 1 차원 충돌 경우 그 특이점을 길 쭉한 타원 궤도로 근사함으로써 간단히 정칙화할 수 있다. 일반적으로, 근집계의 정칙화 문제를 다루는 경우에는 각 쌍마 다의 질량 중심 좌표로 바꾸어 특이점을 없애는 자코비 좌표 변 환을 사용한다. 그림 3-6 에서와 같이 N개의 물체 중 k 와 l 이 가장 근접하여 위치한다고 가정하고, 벡터 Q, R 을 다음과 같이 정의하자. fQ mkmr-k;++mm111 'i ' R=r- -Z―召 3-94 여기서 식 3-94 를 두 번 미분하여 이로부터 k 번째와 [번째 물체 와관계있는 운동 미분 방정 식을 구하면 다음과 같이 나타난다. Q• • =mk 노 훔 mI(mkr1-급 - +m~- 글)-을 3-95 R=-(mk+m1) 업益 召+훔 m;(¥,-¥) 3-96 업 또는 R=-(mk+m,) 濬 )+F 3-97 의 형태로도 나타낼 수 있으며, 이 경우 F= 훔 m,( 등尸―望) }:1
의 값을 의미한다. 여기에서 보면 식 3-95 에는 Rkl 항이 없으므 로 특이점의 영향을 거의 받지 않으며, 따라서 이 식은 보조 방 정식의 역할을 하여 다른 운동 방정식에 의해서 풀리게 된다. 또 한, 식 3-94 에서 r-;와 召울 알기 위해서는 R 을 알아야 하며, 이 것은 표준화 변환에 의해 구해낼 수 있다. 만약, 각각의 물체에 m 개의 근접한 쌍이 있다면 식 3-94 에 의한 m 개의 변환식이 식 3-95, 3-96 의 형태로 변환되어 근접 상태를 해결할 수 있다. 지금까지 우리는 정칙화의 방법에 대해서 간단히 알아보았다. 이제부터는 연속화 변환에 대해서 생각해 보기로 하자. 연속화 변환은 정칙화와는 달리 특이점을 완전히 없애는 것이 아니라 자 코비 좌표 변환을 한 운동 방정식의 분모항의 지수 부분을 조절 하여 특이 운동을 완화시키는 것으로, 특이 운동 효과의 제거라 기보다는 감소시키는 변환을 말한다. 만약 t와 T 사이에 dt =gd r (g= Ra : a 는 상수) 3-98 와 같은 관계가 성립한다면, 식 3-98 은 다음과 갇이 나타낼 수 있다. 남)=情)(蓋) 틀)=(志)(룹 )-(R 臨)(뿐)남) 그러므로, 위 식을 식 3-97 에 적용하면 R_% R R’ + m잡 뿐 R =R2aji ' 3-99 의 식을 얻을 수 있으며, 이것을 1 계 미분만으로 나타내면 다음
과 같이 쓸 수 있다. R'=SRa S'=(-~R+F)Ra 3-100 이 경우 위 식에서 a 를 임의로 정하더라도, 식 3-99 에는 여전히 특이점이 남게 된다. 그러나 특이점이 완전히 제거되지는 않더라 도 그 효과가 다소 완화되었음울 볼 수 있다. 죽, 식 3-97 에서는 R3 항이 분모에 있지만 식 3 - 99 에서 a 가 3/2 이면 R 로만 남게 된 다. 이와 같이 특이점의 효과만을 감소시키는 변환을 연속화 변 환이라고 한다. 이러한 것을 섭동을 무시한 케플러 운동에 적용하면, a=l 인 경우는 이심근점각 (E) 을 독립변수로 사용하는 것과 같고, a= 2 인 경우는 전근점각(/)을 독립변수로 사용하는 것과 같다. 그러 나 인공위성 추적에 있어서는 a = l. 5 가 더 유용하게 사용되는 데, 그 이유는 전근점각은 근지접에서, 이심근점각은 원지점 부 근에서 더 효과적이기 때문이다. 이처럼 유용하게 사용되는 연속화 함수 g에는 여러 가지 형이 있다. Szebehel y (1967) 는 속도 함수의 역수를 사용하였고, He ggi허 운동 에너지와 위치 에너지를 y로 사용하였다. 3. 4. 1 Lev i-C iv ita 방법 두 질점간의 거리가 가까워짐에 따라 나타나는 특이점을 제거 하는데 수치적으로 유용한 방법은 1903 년 Lev i-Ci v it a 가 복소수 를 이용하여 2 차원 운동에 대한 독립변수의 변환 의에 좌표 변환 울 도입한 것이다.
죽, 식 3-98 에서 a=l 일 때 dt = R dr 3-101 의 관계가 성립하므로, R 벡터의 성분을 R1=u?-ut R2=2u1u2 3-102 라고 정의함으로써 새로운 종속변수 uI, U2 를 도입하였다. 따라서 이것을 이용하면 식 3-99 는 다음과 같이 나타낼 수 있 고, RII_ ER R+ mkR+ mlR=R2F 3-103 식 3-102 에 의 한 좌표 변환은 R=L(u) u L( u) =[:: -u~2] 3-104 의 형태로 표시할 수 있다. 이 경 우 Levi- C iv i t a 변환은 보통 z=w2 으로 쓰고, 여기서 z=R1+iR 2 , w=u1+ i u2 로 정의된다. 이제 이들 종속변수 w 와 독립변수 R 사이의 관계에 대해 생 각해 보자. 식 3-103 은 새로운 운동 방정식으로서, 독립변수만으 로 이루어진 결과이다. 이 식은 종속변수의 변환에 의해 상당히 단순화될 수도 있고 복잡해질 수도 있다. 일반적으로 복소수 표 식을 이용한 이 두 개의 변환은 다음과 같이 나타낼 수 있다. dt =g( z)dr
z=J ( w) 위의 두 식은 변형된 운동 방정식의 단순한 형태를 얻기 위해서 g =al 劇 2 3-1 0 5 의 관계를 만족해야 하며, 여기에서 a 는 임의의 실수 상수 를 의 미한다. 사실 위 식의 관계를 만족시키는 것이 운동 방정식의 표 준화에 반드시 필요한 것은 아니지만, 실제의 계산에서는 매우 중요한 위치를 차지한다. 일반적으로 시간의 변형은 g =R=~ 합 =|zl 의 형태로 나타나고, z=w2 으로 정의되므로 식 3-105 는 다음과 같이 다시 쓸 수 있다. 鳩 -1=21wl 따라서, f와 g 사이의 관계는 g= 4a I w 12 or g= 4a I z I 의 형태로 표시할 수 있으며, 여기서 a=l/4 울 나타낸다. 지금까지의 과정에 의해 식 3-104 로부터 R'=2L(u) u 3-106 R=u f +u1= ✓ R f +R g 의 식을 얻을 수 있다. 위 식을 보면 汀 공간에서 상대거리 R 에 대한 표현시 제곱근의 계산이 필요가 없는데 이는 계산에 있어서 큰 이점을 가져다 준다. 또한, R 공간의 원점에서의 각도는 w
공간에서의 것에 비해서 두 배의 크기로 나타나기 때문에 R 공 간에서 한 물체가 다른 물체 주위를 1 회전하면 w 공간에서는 반 회전만 하게 된다. 이 상과 갇이 구해 진 Lev i -C i v it a 의 행 렬 L ( 汀) 는 다음과 같은 특 성을 가지고 있다. LT(u)L(u)=Rl 3-107a L'(u )=L(u') 3-107b L( u) v=L( v) u 3-107c (u· u)L(v) 汀 - 2( ii· v)L(ii ) v+( v · 汀 )L( ii) ii=O 3-107d (I : 단위벡터, g, 汀 : 임의의 벡터) 지금까지는 Lev i ...: C i v it a 의 변환 행렬을 이용하여 일상적인 X-Y 공간에서 수학적인 R 공간으로 변환함으로써 특이점을 정칙화하 는 방법에 대해서 알아보았으며, 이제부터는 이것을 실제적인 경 우에 적용시켜 보도록 하자. L( ii)를 이용하여 식 3-103 로부터 五 공간에서 다음과 같이 단위 질량당 2 체의 결합 에너지를 구할 수 있다. hh== 2(R ( 2핥R ) E_ ')u-( m—·uk-~2+ m mk+I)m <1o) 33--110088ba 또한, 식 3-103 에 의해 R 의 변환된 식은 R=2L( u) u+2L( u') u'=[2L( 汀) 五'] 의 형태로 나타나므로 다음과 같이 정칙화된 방정식을 얻어낼 수 있다.
汀―上2 正= ( g 2• fJ.l_L T ( u) F 3-109 이 경우 식 3-108b 에 특이점이 포함되어 있으므로 그로부터 결 합 에너지를 구하면 식 3-109 도 특이점을 포함하게 된다. 또한, 식 3-99 에 R 를 곱하여 R·R=RR 인 관계 를 이용하면 겁?. 仁. (mk; 교 ]=R·F 의 식을 얻을 수 있다. 즉, 썬dt =R·F 가 되며, 따라서 정칙화된 五 공간에서는 위치와 결합 에너지가 다음과 갇이 표현된다. R=L( u) a h'=2 (L( 江) E'· F) or h'=2( 五 '·E( 江 )F 3-110 지금까지에서 보면 식 3-101 , 109, 110 은 五와 t에 대해 정칙화 된 미분 방정식이고, 여기서 R 은 식 3-104 에 의해 구해낼 수 있 다. 또한, 식 3-110 의 결합 에너지는 4 차 혹은 5 차의 Rung e -Ku tt a 방법으로 구할 수 있으며 2 체 문제의 경우에는 섭동력 F 가 존재하지 않으므로 결합 에너지의 변화율도 없다. 이 와 같이 Lev i-Ci v it a 는 특이 접 이 존재 하는 일상적 인 공간 x, y 공간에서 수학적인 공간인 R 공간으로 변환한 후에 특이 접이 없는 五 공간으로 바꾸어 중으로써 2 차원 정칙화에 성공하 였다.
3. 4. 2 Kusta a nheim o-Sti ef e l 방법 1965 년 Kus t aanhe i mo 와 S ti e fel 은 3 차원 운동의 경 우에 알맞 게 Levi- Civi t a 변환법을 4 차원으로 일반화하여 3 체 문제의 해를 구하는 정칙화에 성공하였다. 그들은 이것을 위해 다음과 같은 관계에 있는 4 차원의 R 벡터와 汀 벡터를 도입하였다. R=L( 汀) 汀 U1 - u2 - U3 U4 I I R, I I U1 L(u)= UU32 UU14 - Uu4, - UU32 II '• R~ = II RR32 II ,• u= II UU23 Zl4 - U3 U2 - U1 I I R4 I I U4 위의 관계를 이용하면 두 질점간의 거리 R 의 성분과 크기는 RR12==u2r (U ―1 Uu2 g— _U쩌3 U +4u) I 33--111l11ha R3=2(u1u3+ u2u4) 3_11lc R4=O 3_111d R=~=ur+ul+ul+uI 3-112 의 형태로 나타낼 수 있다. 1933 년 Hurw it z 는 Lev i-Ci v it a 의 변환법을 3 차원으로 일반화 하는 것은 불가능하지만, 4 차원으로는 가능함을 보였다. 이 경우 벡터 i1의 4 개 성분 중 1 개는 임의로 정한 것이므로, R 이 주어 졌을 때 i1의 초기 성분을 어떻게 주느냐가 문제로 나타난다. 여 기서 u 의 성분들은 五 벡터와 R 벡터 간의 관계식들에서 결정 되고, 이로부터 u 를 결정해낼 수 있다. 식 3-llla 와 식 3-112 로 부터
ur+uf= —21 (R1+R) 3-1 1 3 의 관계를 구할 수 있고, 이것의 단순화를 위해서 U1 또는 m 를 0 으로 놓음으로써 한 성분을 정할 수 있다. 또한 식 3 - lllb 과 3-lllc 로부터 U2R 꼬R= I1++R~R3U 4, U. 3= R3RUl1+-RR2 U4 3-1 1 4 의 값을 구할 수 있다. 여기서 만약 R 이 0 보다 크거나 같다면 식 3-113 과 3-114 는 u 의 초기 값을 결정 하는 데 사용할 수 있다. 또한, 만일 R 려 음수라면 의미 있는 소수점 이하의 수치를 갖 도록 하기 위하여 다음의 관계식을 사용한다. u~+ 짜=—21 (R-R1) 3- 11 5 U1R2Ru=2-+RR~3lU 3, U. 4= R3Ru2--RRl 也 3 3-116 이 경우에 U2 와 U3 는 임의의 값을 선택할 수 있다. 이와 같이 u 의 성분들이 결정되면 식 3-106 과 식 3-107a 에 의 해 u' 은 五 '=-2AR: -L T ( u) R' 또는 u'=—21 LT (u)R..:.. 3-1 1 7 의 형태로 나타나며, 이 경우 시간 t를 얻기 위해서는
t'= R 3-118 의 관계식을 풀어주어야 한다. 우리는 식 3-109 를 풀어중으로써 u(r) 의 값을 알 수 있고, 식 3 - 112 를 r 에 대해 두 번 미분하여 R=2( 汀 ” • it) +2(it '· i t') 의 관계 를 찾아낼 수 있다. 위 식은 일반적으로 식 3-108a 와 3 - 109 에 의 해 다시 다음과 같이 나타낸다. R-2hR= (mk+ m1) +R[ it ·L1 ( it) F] 3-119 이 식은 만일 섭동력 F 가 존재하지 않는다면 안정된 상태에 있는 조화 진동자의 미분 방정식이 된다. 그러나 실제 N 체 문제 에서는 항상 섭동력이 존재하므로 안정성은 존재할 수 없고, 원 래의 운동 방정식에 비해 상당히 안정된 계의 변환식을 보일 뿐 이다. 이일제반 적K으-S로 방R법 의벡 터실와제 R계 벡산터 과의정 에모 든대 해성서분 이생 주각해어 졌보다자면. R= 서간十 R 궁 +R§ 의 형태로 나타난다. 여기서 만일 R1 이 0 보다 크거나 같다면 U4 는 0 이 되고, 나머지 u 성분은 u1=~ U2= (훑) U3= (훑)
의 관계를 통해 얻어낼 수 있다. 반대로 R 려 음수인 경우 t (3 는 0 이 되고, 나머지 u 성분은 다음과 같이 계산된다. UI=(~) u2= 訂 U4=( ~) 또한, u' 의 성 분은 식 3-117 로 부터 u, =+21 ( u1R1 + u2R2 + uaRa) u2=+21 (-u2R1+ u1R 辻 U4R3) u 는—12( - uaR1-u 4R2+ u1Ra) u4=2-1( u4Rl_ U3R2+ u2R3) 의 형태로 얻어낼 수 있다. 식 3-108a 에 의한 결합 에너지의 초기값은 h= R一 ·R--.. _ (mk+m1) 2 R 이 되므로 벡터 u, u’ 와 결합 에너지 h 를 이용하여 미분 방정 식 u i'_2 晶!=요2 (L7F) 1
u;1_l!: ._U 2=E(LTF) 2 2 2 u3' __2h U3= 一R2 (LTF)3 u~' -42u 4 =1!2-- (L rF) 4 R —2h R= (mk+m,) +R ~4 (LT--F ) ;U; i= I 를 풀어 주어야 하며, 여기에서 (LTF) 1= u,F, + u2F+ U3A (LTF) 2= -u2F, + u 晶+ U4F3 (LTFh= - u3F1 - u,F2 + u1F3 (LTF)4=U4F广 U3F2+u2F3 를 의미한다. 五 공간에서 R 공간으로 변환하는 데 필요한 공식은 다음과 같다. R1=ur-u~-ul+uf R2=2 (u1u2-U 3U4) R1=—R2 R (u31=u 2f (- uu 12uu3+2 -u2uu3 .u) 3+ u. 파) R2=~R2( U2U1+ U1U2— U4 U3-U 3 파) R3= —R2 (U3U 日+ U4U2+ U1U3+ U2U~) 이 경우 해를 구하는 동안 다음의 거리와 결합 에너지를 항상 점
검해 주어야 한다. R=~4 u; 3- 12 0 i= l 4 h= 2 i~= I u; 드R ( mk + m1) 3- 12 1 여기서 결합 에너지 lt 는 다른 입자들에 의한 위치 에너지보다 월등하므로 거의 상수로 볼 수 있다. 따라서 식 3 - 121 은 R이 0 에 가까워질 때 잘 정의된 정칙화의 형태이다. 지금까지 우리는 K-S 변환에 대해서 살펴보았다. 물론 이 방 법에 단점이 없는 것은 아니지만, 일반적으로 계산상 중요한 수 치들이 없어지리라고 예상이 될 때 K- S 방법의 두드러진 장점이 다음과 같은 점에서 나타나므로 보통 3 차원 운동의 정칙화에 많 이 사용된다. 1) 쌍을 이루는 물체의 정칙화된 미분 방정식. 2) R의 결정을 위한 제곱근의 계산이 없다. 3) 원점에서의 각이 두 배로 나타난다. 이와는 반대로 K-S 방법에는 다음과 갇은 단점이 나타난다. 1) 근접계가 2 체를 넘는 경우 정칙화가 불가능하다. 2) 풀어야 할 또 다른 미분 방정식이 존재한다. 3) 좌표 변환에 시간이 많이 소요된다. 참고 문헌 Aarseth , S. and Zare, K., 1974, Celestia l Mechanic s , 10, 185. Ahmad, A. and Cohen, L., 1973, ]. Comp ut . Phys . , 12, 389.
Bett is, D. G. and Szebehely, V., 1971 , Astr o p hy . and Sp ac e Sci. , 14, 133-150. Danby , J. M. A., 1989, Fundamenta l s of Celestia l Mechanic s , 2nd edit ion (W illm ann-Bell: Ric h mond) . Hori, Genic h ir o u, 1988, 『 天 體 力 學 講義 』 (束京大學出版會 : 東京). Kusta a nheim o, P. and Sti ef e l, E., 1965, ]. Math . 218, 204. Levi- C iv i t a, T., 1 903, Ann. Math . 9. 1. Lundberg, J., S zebehely, V., Nerem, R. S., and Beal, B., 1985, Celesti al Me ch anic s , 36, 191-205. Marchal, C ., 1990, The Three-Body Problem (Elsevie r : Amste r dam) . Moulto n , F. R., 1914, An Intr o ducti on to Celestia l Mechanic s , 2nd edit ion (MacM illan : New York) . Sundman, K. F., 1912, Acta Math . 35. 105. Szebehely, V., 1967, Theory of Orbit (Academi c: New York) . Sti ef e l , E. L. and Scheif ele G., 1971 , Li ne ar and Regu lar Celestia l Mechanic s (Sp ri n g e r-Verlag: Heid e lberg) . W int n er, A., 1947, The Analyt ica l Foundati on s of Celestia l Mechanic s (Prin c eto n Univ . Press: Prin c eto n ) .
제 4 장 섭동론 4.1 특수 섭동론 두 개의 물체가 운동하고 있을 때에 제 3 의 물체와 제 4 의 물체 가 섭동을 하고 있다면, 이러한 문제는 일반 해를 얻을 수 없고 다만 수치적인 근사값에 해당하는 특수 해가 얻어진다. 우리는 이 방법을 섭동론이라고 부르는데, 이것은 특수 섭동론과 일반 섭동론의 두 가지로 나누어진다. 이 절에서는 그 중 특수 섭동론 의 경우에 대해서 생각해 보겠다. 특수 섭동론은 운동 방정식을 위성의 초기 위치부터 임의의 위 치까지 시간에 대해 칙접 수치 적분하여 미래의 어느 시각에서의 위성의 위치와 속도를 구하는 방법이다. 이 방법은 일반 섭동론 이 장기간 인공위성의 궤도를 예측하는 것과는 달리 상대적으로 짧은 구간의 궤도를 예측하는 데 적용되며 요구되는 정밀도 이내 로 궤도 예측이 가능하다. 특수 섭동론은 실질적이면서 빠른 계 산과 함께 필요한 정확도까지 궤도를 결정시켜 주는 장접이 있 다. 이러한 방법에는 Cowell 방법, Encke 방법 그리고 매개 변
수변화방법 등이 있으며, 여기서는 주로 Cowell 과 Encke 방법 에 대해서 설명하도록 하겠다. 4. 1. 1 Cowell 방법 어느 순간 인공위성의 위치와 속도를 정확하게 계산하기 위해 서는 섭동력을 일으키는 우주 공간의 환경을 정확하게 이해하고 분석하여 정량화함으로써 섭동력에 대한 수리적인 모형 을 만 들 어 야 한다. 이러한 모델은 결과적으로 각 섭동력에 의한 위성의 가 속도를 계산할 수 있도록 고안된 것이어야 하며 이렇게 해서 얻 은 섭동 가속도는 지구를 점 질량이라고 가정했을 때의 중심 가 속도와 합산하여 인공위성이 받는 총 가속도로 나타나게 된다. 일반적으로 인공위성이 받는 총 가속도는 2 계 미분 방정식으로 표현되고 이 방정식을 두 번 적분함으로써 원하는 시각에서의 인 공위성의 위치와 속도를 얻을 수 있다. 이러한 방법을 Cowell 방법이라고 한다. Cowell 방법은 정량화된 모든 환경 변수를 시간의 변화에 따 른 함수로 정량화하여 이들 환경 변수가 임의의 시간에서 인공위 성에 미치는 섭동력을 계산해 냄으로써 인공위성의 운동을 알게 되고, 또 제반 지상 추적 시스템을 운영할 수 있는 가장 기초적 인 자료를 제공하는 하나의 방법이다. 이 방법은 지구를 점 질량 으로 가정한 중심 가속도에 위성의 위치에 영향을 주는 모든 섭 동력을 더하여 2 계 미분 운동 방정식으로 표현한 후 위성이 받는 총 가속도를 시간에 관하여 연속적으로 적분함으로써 임의의 시 각에서 위성의 위치와 속도 등의 요소를 파악할 수 있도록 하는 데 그 목표를 두고 있다. 그러나 이러한 일련의 모든 과정이 컴 퓨터를 사용하여 처리되므로 시간이 경과함에 따라 오차가 누적
되어 결과적으로 위성의 위치를 예측하는 데 있어서 편차가 증가 하게 된다. 4. 1. 1. l 기본 방정식 Cowell 방법은 앞에서 설명한 바와 갇이 운동 방정식을 직접 산술적으로 적분하여 궤도의 운동을 계산한다. 일반적으로 위성 이 지구로부터 받는 가속도는 지구를 질점으로 보았을 때의 중심 력과, 섭동력의 합 i2=n I F i로 주어진다. 죽, t° +G(m 학- m) —r7尸 =2i=n I F一 i 4-1 가 되며, 여기서 m EB 과 m 은 각각 지구와 위성의 질량을 나타내 고, 섭동력은 지구의 중력 분포와 태양, 달의 중력 그리고 태양 복사압, 대지 항력 등에 관계된다. 위 식에서 보듯이 Cowell 방법을 이용해서 궤도 예측을 하는 데 필요한 계산 과정은 이 위성에 작용하는 섭동력을 계산하는 부분과 위성의 총 가속도를 적분하는 부분으로 크게 나눌 수 있 다. 여기서 섭동력을 계산하기 위해서는 지구의 중력 분포를 알 아야 하며 지구의 중력은 위성의 위치에 가장 큰 영향을 주는 요 소이다. 죽 인공위성이 받는 힘을 표현하기 위해서는 지구의 중 력장 분포에 의한 섭동을 필수적으로 고려하여야 한다. 지구의 중력 분포는 다음과 같은 중력 퍼 텐셜 (Kaula 1966) U =~r [1I + ~~22 im;~O (\ ~r r (C nmCOS mL + SnmSi n mL) P::' (sin l) ] 4-2 의 식으로부터 계산해낼 수 있으며, 여기서 L 은 경도, l 은 위
도, R ai 는 지구의 적도 반경을 의미한다. 또한, 지구의 비대칭 중력 퍼텐셜에 의한 가속도 # N S 는 지구 상공에 있는 위성의 위 치에 대한 함수로써 다음과 갇이 주어진다. #Ns= [伊+ 伊](:i〔 :l)+ 莊t )(_COs0:naa) 4-3 + [ rt'' + 樣t)] ( __ ss:cnn0: ::ns aa) 여기서 l 은 위성의 적위, a 는 위성의 적경을 의미한다. 식 4-3 에서 보면 많은 첨자들이 다양하게 사용되고 있는데, 이 중 위첨 자 z 와 t는 Zonal 과 Tesseral 을 나타내고, 아래 첨자 r, E, N 은 각각 동경 방향, 동쪽 방향, 북쪽 방향 성분을 나타낸다. 이 들은각각 r.. r= aaur rE= rco1s l aauL YN=—1 r a8ul 의 형태로 표시된다. 이 경우 지구 퍼텐셜 zonal harmon ic s 에 의한 가속도는 rT(Z)=K(r){3]2( 응 s i n2l ―강)+-8;- [4hs i n l( 응 s i n2l 당) +뚜] 4( 뿡 s i n4l- 부 s i n2l+ 강)]}
幻 E(Z) = O rN
- (420 cos2 /) /4.4] }] 여기서 Pj, ~> =3 cos !, PJ .?=fsi n 21-f, PW=15 cos2 I /i,청 =cos l( 平 s i n2 l_¥), PJ. ~> =105 cos3 l lCnm22 ==1C m. 5m7C8O XS 1m0-L6 ,+ SnmSi nS 2 m2 = L —0 . 9 05 X 10-G C31 =2 .11 X 10-6, S31 =0 . 320 X l0 一 6 C33= O. l00 X 10-6' S33=Q . 198 X 10-6 cC4442 == 0— .` 007 . 40 0X1 11 0X- s1,0 - 6, Ss3312 = = OO .. 0104 48 9x X 1 01 0一 6- s 이 된다. 지구의 중력장에 의한 영향 의에도 인공위성에 작용하는 섭동 력에는 여러 가지 다른 요인들이 존재한다. 이들 중 태양과 달의 인력에 의한 힘이 크게 영향을 주어 인공위성의 위치가 변화하기 도 하는데, 이러한 힘에 의한 가속도는 戶 0 m= 흠 Gm;(~- 广句 4-4 의 형태로 나타난다. 여기서 i =l 일 때는 태양, i =2 일 때는 달 의 인력에 의한 가속도를 의미한다. 일반적으로 지구 이의의 제 3 체인 태양(또는 달)의 힘은 인공위성과 태양(또는 달)의 상대 위 치로 나타내며, 따라서 지구 중심 직교 좌표계에서 태양과 달의 위치를 계산할 필요가 있다(J PL DE200, DE403, DE404 등을 사용 하여 구함). 태양과 달 이의에 다론 행성의 인력에 의한 영향도
있으나 이러한 영향은 매우 작으므로 무시할 수 있다. 또한, 태양은 끊임없이 의부로 복사 에너지를 방출하므로 태양 의 복사에 의한 힘도 인공위성의 섭동력으로 무시할 수 없는 큰 영향을 준다. 보통 태양 복사압에 의한 위성의 섭동 가속도 #SR 는 t sR= 요C (\ cR•• Amesfaft )I r7~3eE Bo0 4-5 의 형태로 표시되며, 여기서 c 는 빛의 속도, So 는 lAU 만큼 떨 어진 거리에서 태양상수, CR 은 위성 표면의 반사율에 비례하는 계수, A eg 는 위성의 단면적, r 懿o 는 지구에서 태양까지의 거리 룰 의미한다. 앞에서 설명한 바와 같이 Cowell 방법에서는 섭동 가속도를 2 체 운동 방정식에 더하여 총 가속도를 얻은 후 이를 두 번 적분 하여 임의의 시각에서 속도와 위치를 결정하는 알고리즘을 취한 다. 식 4 - 1 에서 왼쪽의 두번째 항을 오른쪽으로 옮겨서 인공위성 에 작용하는 총 가속도를 구해보면 그 기본 방정식은 다음과 같 이 나타t낼1 0 1수a1= 있i다cB .+ i±= l F ;= iC B+ 戶. NS 군국 #.0 + isR 4-6 위 식에서는 섭동에 의해 나타나는 가속도의 항들 중 중요한 4 가 지만을 포함시켰으며, 여기서 숭. CB 는 점 질량으로 본 지구와 무 한소 질량을 갖는 위성을 2 체 문제로 보았을 때의 가속도로서 f°c B= —G (mEB+ msat) —r7 T 4-7 의 형태로 표시된다. #o 와 #'m 은 각각 태양과 달의 중력에 의
한 가속도를 나타낸다. 식 4-7 에 식 4-3, 4-4, 4-5 의 결과롤 대 입하여 정리하면 이둘 5 가지 가속도에 의해서 나타나는 총 가속 도 P t o t al 은 皇=[ 戶 lz)+ 탸 1 呼+ 탸t)(― s i n a) +[ 平+ i ;k 이 (— sin l cos a) +Gm0(7 ;。 ° _一訂 틀 )+GmM(~一 -; 「틀) 덩 CR~)~ 二? |-G(11Z EI) +1nsa t)플 4-8 皇= [ #;z) + 伊]fr + 伊 (cos a) —[ i;kz ) + #k 이 (sin / sin a) +Gm0(~ 틀 )+Gmm(~ 충) 밍 CR~~-G(mEB+msa t)읍 4-9 皇=[平+ 伊 ]s i n l+[#kz)+ #).,t)] (cos l) +Gm0(7 ::그 |3 층 )+Gmm(~二 ; 13 층) +챙 cR 乞州巴告_ G (me+ msa t)을 4-10 처럼 각 성분에 대해서 나타내 줄 수 있다. 이와 같이 얻은 가속 도는 시간에 대한 2 계 미분 방정식이므로 이것을 시간에 대하여 두 번 적분함으로써 임의의 시각에 있어서의 인공위성의 속도와 위치를 지구 중심 직교 좌표계 (xyz , i, j;, z) 로 계산할 수 있 다. 여기에 사용하는 수치 적분 방법에는 4 차, 5 차, 6 차 그리고
7 차 Rung e -Kutt a 방법 (Fehlberg 1968) , Adams-Moulto n 다단계 적 분법 (Henric i 1962) 그리 고 Gauss-Ja c kson 다단계 적 분법 (Townsend 1963) 등이 있으며, 일반적으로 많이 사용되는 Rung e -K utt a 방법이 더 높은 정확도를 얻을 수 있으나 계산 속 도가 느리다는 단접이 있다. 4. 1. 1. 2 적 분 방법 비보존력장에서 고전적인 N 체 운동 방정식과 그에 해당하는 운동 방정식들은 해석적인 접근 방법으로는 해롤 구하기가 힘들 다. 따라서 인공위성 궤도를 결정하는 데 섭동력을 고려해 줄 경 우 수치적인 적분 방법을 사용하게 된다. 이러한 수치 적분 방법 이란 기본적으로 초기 조건이 주어질 때 다음과 같은 상미분 방 정식의 해를 구하자는 것을 그 목적으로 한다. 뿔=f (x, y) 4-11 일반적으로 수치 적분에서는 5 차 Rung e -Kutt a 방법이 많이 사용된다. 이 같은 5 차 Rung e -Kutt a 방법은 6 차보다 시간이 적 게 걸 리는 반면 끝자름 (tru ncati on ) 오차는 더 크게 나타난다. 보 통 정밀한 계산에서는 7 차 Rung e -Kutt a 방법을 이용한다. 이제 Rung e -Kutt a 방법을 사용하여 인공위성의 운동 방정식 을 수치 적분하는 실제적인 방법에 대해서 생각해 보자. 주어전 기 준점 to 때 인공위 성 의 초기 위 치 와 속도가 f;= (xo, Yo, Zo) , tJo= (uo, Vo, Wo) 라고 알려진 경우 식 4-1 은 다음과 같이 표현할 수 있다. t =-G(me+msa t)r 혹+i支= 1 Fi= 1 4-12
여기서 위 식을 각 성분으로 나누어 주면 硏d2x= —G ( 1129 + 1n sa t ) 픕1 + i~=4 I F,-=/1 굶d2y= -G (m 터 + 11lsat) 갈r -+ l2=4 I F),1 = f2 4-12 7d=2Z- G(112 $ +112sa t)r 유+ i2=4 I FZ1= f3 의 형태로 나타나며, 이것을 dt / dt= u, dy / d t = v 그리고 dz/ d t =w 인 관계를 이용하여 다시 쓰면 다음과 같이 쓸수 있다. 뿜=― G(1n (D +11Zsa t)r속 -+it= I Fx ;= /1 뿜7dvt= = -—GG (( n11Z'lEE BB + + 1n'nl ssaa tt ) )밖rr유 - ++ i2it=4= II1 FFy zi; ==ff2 3 4-14 여기서 f=f(t, x, y, z, u, v, w) 4-15 롤 의미한다. 이 경우 위 식들은 2 계 연립 미분 방정식 3 개가 서 로 꼬여 있는 상태 이므로 Rung e -Kutt a 방법을 적 용시 키 는 데 주의해야 한다. 지금까지 일반적인 Rung e -Kutt a 방법을 이용하여 미분 방정 식을 수치 적분하는 방법에 대해서 알아보았으며, 이제부터는 정 밀궤도 계산에 자주 쓰이는 7 차 Rung e -Kutt a 방법의 알고리즘 울 소개하겠다. 7 차 Rung e -Kutt a 방법은 일반적으로
뿜타(t, y) 4-1 6 의 형태로 주어전 상미분 방정식의 해를 t=t o+h 의 시간에서 구 하는 것을 그 기본 개념으로 한다. 이 방법은 1968 년에 Fehlber g가 시도하였는데, 그는 다음과 같은 과정을 통해 인공 위성의 운동 방정식을 풀이하였다. lo =f ( lo, Yo) /1=/( 三 h, Yo+h 꿈) /2=![ t o+ 강 h, Yo+ h( -f6l o+ 宣 11)] /3=![fo +½h, Yo+ h( 갑 I吐 강서] /4 = f[t 0 군 h, Yo 十 h( 갑 -lo- 쳅 -/2+ 럽)] f5= f[三 h, Yo+h( 蔚 ++/a+½/ .i)] Is=![to + ¾h, Yo+h( 훑f나籠 /3 을f4+船)] lIs1==!![[ tt oo ++ t강 hh,, YY oo++hh((2 옮/fo-o 퉁+ A읊+f 뿡4-f§4f―5뿐+f陶5 )+ ]隱 f6 +3 f7)] /g=![to+ ½h, Yo+ h( 훑 lo+ 읊f3-醫/4+船멜f6 톱f7 꿉/8)] /10 국〔fo +h, Yo+h( 繼fo-醫f3+黑f4-뿔f5+儒f6
을f7+읊-f8+影)] fu=! [lo, Yo+ h( 志fo-\f5 _ 志f6답-f7+곱f8+衍)] /12=t [to+h , Yo+h(- -H갈-륄h + 鬱鉉-빨f곱關f6 을正읊f8+丑f9+f1 1)] 이러한 과정을 통해 얻어전 식 4_16 의 해는 y=yo+ h( 蓋f5 + 훑f6+훑f7 + 畜I s+ 占f9+晶fu +晶fl 2) 4-17 의 형태로 나타나며, 여기서 h 는 적분 간격을 의미한다. 이 방 법의 끝버립 오차는 읊f0+fl 0_ fI I 玉 )h 4- 18 의 값을 갖는다. 일반적으로 Rung e -Kutt a 방법은 총 가속도를 시간에 대하여 적분하여 속도와 위치를 계산하는 알고리즘을 가지고 있기 때문 에 지정해 준 적분 간격, 죽 시간 간격에 따라 서로 다른 결과를 보여준다. 대체적으로 주기 /50 에서 주기 /100 까지는 큰 차이를 보 이지 않지만, 이보다 더 큰 경우에는 그 편차가 급격하게 증가한 다. 이러한 계산 결과에 의하면 주기 /70 이 가장 적당한 시간 간 격으로 알려져 있다. 지금까지 설명한 바와 같이 Cowell 방법은 인공위성에 미치는 모든 힘을 하나의 운동 방정식으로 통합하여 표현할 수 있으므로
그 계산 과정이 간편하고, 시간 간격을 줄여 줌으로써 원하는 정 밀도의 해를 얻을 수 있다. 또한, 이 방법은 어떠한 섭동력에도 쉽게 적용할 수 있고, 섭동 궤도가 큰 경우에 있어 더욱 좋은 결 과 를 나타내므로 대부분의 인공위성에 많이 적용된다. 4.1. 2 Encke 방법 이 방법은 1849 년 Bond 가 처음으로 개발하였으나 보통 Encke 방법이라는 이름으로 많이 불린다. 특수 섭동론의 여러 가지 방 법 중의 하나인 Encke 방법은 Cowell 방법에 비하여 그 형태가 복잡함에도 불구하고 반세기 이상이나 앞서서 1857 년에 개발되었 다. Encke 방법이 Cowell 방법보다 먼저 개발된 것은 그 당시 의 계산 능력을 고려할 때 물체에 미치는 가속도의 항을 전부 적 분하는 Cowell 방법보다는 섭동력만을 적분하여 주는 이 방법이 보다 쉬웠기 때문이다. 이 방법은 섭동력을 받는 실제 궤도와, 임의의 시점에서 2 체 문제의 실제 궤도에 접하는 기준 궤도를 설정하고, 이들 기준 궤 도와 실제 궤도와의 가속도 차이인 섭동력만을 적분해 줌으로써 두 궤도의 차이가 일정한 범위를 유지하도록 보정하는 방법이다. Encke 방법은 기준 궤도에 대한 항이 포함되기 때문에 Cowell 방법에 비해서 그 형태는 복잡하지만, 섭동력에 해당하는 가속도 가 비교적 작으므로 큰 적분 간격을 쓸 수 있어서 계산 횟수가 줄어들고 이에 따라 계산 시간이 줄어든다는 장점을 가지고 있 다. Encke 방법은 기준 궤도와 실제 궤도 사이의 거리가 커짐에 따라 그 효과가 줄어들기 때문에 주기적으로 축적된 섭동을 설명 하기 위해서 기준 궤도의 요소들을 다시 맞추어 주는 것이 필요 하다. 이 러 한 과정 을 궤 도의 교정 (recti fica ti on ) 이 라고 한다.
 \ \ \ \ `` `'~l` `I`A 1 v_'주二。-,l _- -----l -- —__-x-=__ 二-X _-o ―了茂-- }--궤 -' 요— \二//// l
\ \ \ \ `` `'~l` `I`A 1 v_'주二。-,l _- -----l -- —__-x-=__ 二-X _-o ―了茂-- }--궤 -' 요— \二//// l
Encke 방법에서 쓰이는 기준 궤도는 보통 원, 타원, 포물선, 쌍곡선 등으로 가정되고, 섭동이 포함된 실제 궤도와 한 번 이상 만나기 때 문에 〈 k i ss i n g 〉 의 과학적 용어 인 〈 oscula ti on 〉 을 써 서 접촉궤도 (oscula ti n g orbit ) 라고도 한다. 이와 관련해서 기준 궤도 롤 간단히 케플러 궤도로 택하지 않고 섭동항 중에서 주요 영년 항과 주기항을 포함한 기준 궤도를 쓰며 궤도 교정 간격을 늘리 기도한다. 그립 4-1 에서 나타낸 바와 갇이 섭동이 없는 경우 우주선은 계 산의 시간 간격 동안에 기준 궤도를 따라 움직이며, 이 경우 우 주선의 위치 벡터는 5 가 된다. 그러나 섭동이 고려되면 우주선 의 궤도는 보다 복잡하게 변화하게 되므로, 우주선의 위치 벡터 와 속도 벡터 역시 각각 다음과 같이 나타낸다. r=fJ + or v= if+o v 4-19
이제 궤도 계산에 있어서 남아있는 단계는 7 과 5 를 사용해서 앞 철에서와 같은 과정을 통해 운동 방정식을 계산하는 것이다. 이러한 과정은 전 궤도를 통해서 계속되며, 일반적으로 기준 궤 도는 f와 g 급수를 이용해서 계산한다• 4. 1. 2. 1 기본 방정식과 적분 방법 일반적으로 섭동을 받는 인공위성에 대한 운동 방정식은 다음 과 같이 표현된다. f+µ—r7 T =F一 4-20 여기서 r=r(x, y, z) 이고 µ=G(mEB+msa t)를 나타낸다. 이 경우 인공위성에 작용하는 섭동력 F 에는 지구의 비대칭 중력장 에 의한 섭동, 태양과 달의 인력, 태양의 복사압에 의한 섭동 가 속도가 모두 고려되어야 한다. 반면에 섭동을 받지 않은 2 체 문 제의 경우 그 운동 방정식은 'if+µJ!’r =o 4-21 pµ 의 형태로 표현되고, 여기서 5= 5(f, TJ, g)가 된다. 만약 인공위성이 다양한 섭동력을 받는다면, 식 4-19 에서 보듯 이 인공위성의 실제 궤도와 기준 궤도 사이에는 Br= r— p = 8xz+8y ]+o죠 4-22 만큼의 차이가 생기게 되며 이 식을 이용하여 식 4-20 에서 식 4-21 을 빼주면
~=F+µ 信―fa-) 4-23 의 관계식을 얻을 수 있다. 위 식에서 87 이 작아지기 위해서는 괄호 안의 값이 작아져야 하는데 이것은 인공위성이 기준 궤도를 벗어나지 않아야 함을 의미한다. 만약 임의의 초기점에서의 위치 와 속도 벡터를 안다면 그 점을 지나는 기준 궤도를 구할 수 있 으며, 이것을 섭동된 계산과 비교하여 4 t후의 인공위성의 위치 와 속도를 알아내면 다시 그 시각의 기준 궤도를 얻을 수 있다. 식 4-23 에서 우변의 항들은 급p군 =1+2 q 짜r = (1+2 q)-홍 =l- fq 4-24 晟―:)=꿈(fq r ― or) 4-25 의 형태로 나타낼 수 있으며, 여기서 r2=(x2+y 2 +z2), P2=( 판 +1J 2+ t 2) 을 의미한다. 위 식에서 이들을 Tayl o r 급수로 전개하 면 q와f는 q= 군2-pp 2 2 =써(~+亨 )ax+( 7J+우 )8y +(t우 )az)] /=3(1- 웅q+醫q 2_ 醫%+…) 4-26 으다시로 쓰구면해 낼다 음수과 있 다같.이 식표 현4-할26 의수 q있와고, f 를여 기이서용 해h서= y 식, ~4-큰2 3 수을 직 단반경을 의미한다.
~=F+hfq r -h8r 4-27 또한, 식 4-23 에서 그 우변항을 信―곱)= 〔냐―占)-릅 4-28 의 형태로 나타내고, 여기서 or • < r + p) = < r -p } • < r + p) = r2-p2 4-29 의 관계가 성립한다는 사실을 이용하면, 식 4-27 을 f에 관한 급 수를 피하여 나타낼 수 있다. 죽, 〉-눈(~)(군 +r p+p 2) =(W)(~ 「: ;P2) 4-30 =(~)(군~) 이 되므로, 식 4-27 은 다음과 같은 형태로 다시 나타낼 수 있다. 업 ;-=F+µ( Q~-합) 4-31 여기서, Q는 Q=(~컴g)(군~) • 4-32 의 값을 갖는다. 한편 식 4-31 의 수치 적분을 위해
d(dot r ) =ov 4-3 3 ~=F+µ( Q r- 뚜)=g(t fp’ -} , , P, r. F) 으로 두면, 식 4-33 을 수치적으로 적분해 중으로써 실제의 속도 벡터와 섭동을 받지 않은 속도 벡터의 차이와, 실 재의 위치 백더 와 섭동을 받지 않은 위치 벡터와의 차이 를 각각 얻어낸 수 있 다. 이 경우 일반적으로 Cowell 방법보다는 보다 차수가 낮은 4 차 Rung e -Kutt a 방법이 많이 이용된다. 벡터 5 와 5 는 이전 단계의 위치, 속도와 간기 때문에 각각의 적분 구간의 시작 단계에서 이미 알려져 있다. 따라서, 기준 궤 도와 섭동을 받은 궤도 사이의 차는 각각의 적분 단계에서는 적 은 상태를 유지한다. 이 경우 초기 조전은 실제 궤도와 섭동을 받지 않은 궤도가 같은 점에서 시작되므로 or=O ov=o 4-3 4 의 값을 갖는다. 이것은 결국 이러한 초기 상황에서 인공위성의 궤도에 실제로 영향을 주는 가속도 항은 F 밖에 존재하지 않는다 는 것을 의미한다. 한편, 시간이 경과할수록 섭동력 F 의 영향으로 식 4-34 의 값 이 접점 증가하여 실제 궤도와 기준 궤도는 점점 그 편차가 커지 게 되며, 결국에는 두 궤도의 중심력의 차이가 섭동력보다도 커 지게 되므로 식 4-33 이 섭동력에 별로 영향을 받지 않아 계산의 정밀도가 떨어지게 된다. 이러한 문제는 궤도 교정, 죽 실제 궤 도로부터 얻은 접촉 궤도 요소로 기준 궤도를 다시 설정함으로써 해결할 수 있다. 다시 말해서 궤도 교정 때는 식 4-34 가 성립하
고, 이후의 실제 궤도에 대한 위치 벡터와 속도 벡터는 계산된 8r 와 85 값에 기준 궤도의 위치 벡터와 속도 벡터를 더해 줌 으로써 얻어진다. 따라서, 식 4 - 26 에서 I 와 q를 구한 뒤 식 4 - 25 의 관계 를 이용하면 식 4 - 23 의 r 값을 구해낼 수 있다. 우리 는 지금까지 이 절에서 Encke 방법을 이용하여 섭동력이 존 재하 는 경우의 인공위성 궤도를 결정해 보았다. 이 방법은 Cowell 방법에 비해 적분 간격을 비교적 크게 취할 수 있으므로 오차와 계산 시간 을 줄 일 수 있다는 장점이 있다. 일반적으로 궤 도 주기의 10 정도로 시간 간격을 잡아주는 것이 가장 적당한 것으로 알려져 있으며, 계산 속도는 Cowell 방법에 비해 약 4 배 정도가 빠르다. 그러나 운동 방정식의 표현이 다소 복잡하고 2 체 문제를 반복적으로 풀어야 하는 단점이 있으며, 기준 궤도를 꼭 계산해야 되는 불편이 있다. 또한, 이 방법은 큰 섭동력이 존재 하 는 경우에는 오차가 크기 때문에 일반적으로 잘 적용되지 않 는 다. 4.2 일반섭동론 일반 섭동론이란 궤도 요소에 대한 라그랑주 (La gr an g e) 방정 식을 급수 전개시켜 해를 구하는 이론이다. 이것은 특수 섭동론 에 비해서 급수 전개되는 함수가 수백 개의 항으로 이루어져 있 어 아주 복잡하고, 정지 위성의 궤도 산출에 적용할 때 약 5m 정도의 오차값을 갖는 단점이 있지만, 영년 변화와 장주기 변화 룰 점검할 수 있기 때문에 수년 혹은 수백년 후의 위성이나 행성 의 궤도를 쉽게 예측할 수 있다는 장점이 있다. 기존의 방법에서는 일반적으로 모든 경우에 대해서 a, e, (J},
i, Q, M 의 6 개 궤도 요소를 사용하여 섭동의 양을 구하지만, 이 절에서는 궤도 이심률에 따라 그 경우 를 나누어 서로 다른 궤 도 요소를 적용할 것이다. 이심 률 e 에서 특 이점이 생기 는 경우, 죽 거의 원 궤도인 경우에는 a, i, 요, ec=e cos (JJ, es= c sin (JJ, l=M+ (JJ의 궤도 요소를, e 와 i에서 특 이점이 생기 는 정지 위성의 경우에는 a, ec=e cos W, es=e sin W, U'c = s in i cos 요, Ws=sin is in Q, L=M 틀(ii] = (JJ+요)의 새 로운 궤도 요소 를 이용하여 섭동 방정식을 만들고 여기에 일반 섭동론옹 적용해 보겠다. 이와 같은 섭동 함수는 손으로 직접 전개하면 많은 시간이 요 구되지만, 현재에는 컴퓨터의 발전으로 인하여 Hearn(1 9 76), Dasenbrock(1982) 등이 개발한 컴퓨터에 의한 수식 처리 를 이 용하여 쉽고 빠르게 전개할 수 있게 되었다. 이것에 대한 방법은 4.3 절에서 자세히 알아보도록 하겠다. 4. 2. 1 매개 변수의 변화법 일반적으로 2 체 문제에 있어서 궤도 요소는 상수로 취급되지 만, 실제의 경우에는 이러한 값들이 시간이 경과함에 따라 조금 씩 변화하는 변수의 형태로서 나타나게 된다. 이러한 접에 착안 하여 섭동을 주는 천체의 위치를 산출하는 방법들이 다양하게 고 려되어 왔으며, 이 방법들을 흔히 매개 변수 혹은 궤도 요소의 변화법이라고 부른다. 이러한 매개 변수 변화법은 18 세기 L. Euler 가 목성과 토성 간의 상호 섭동을 구하는 데에 처음 사용 하여 그 연구 결과가 1748 년에 발표되었으며, 1752 년에는 그 효 용을 인정받아 프랑스 과학 아카데미의 대상을 수상하였다. 그후 J. L. La gr a ng e 가 매개 변수의 변화법을 개량시켜 그 이론을 완
성하였다. 이 절에서는 접 촉 궤도와 실제 궤도와의 관계 를 이용하여 직교 좌 표 계에서의 섭동 을 구하고, 이렇게 구한 섭동을 새로운 좌표 ~. t . TJ, iJ 로 나타내고 Lag ran g e 괄호 를 이 용하여 섭동 방정 식을 구하 는 방법에 대해서 생각해 보도록 하겠다. 일 반 적 으로 임의의 시각 t에서의 위성의 위치는 직교 좌표계 에서 X= X ( t, Ci , C2, Cs) y= y (t, Ct , C2, C5) z= z (t, CI, C2, 어 4-35 의 형태로 표 시 할 수 있으며, 이 룰 벡터의 형태로 나타내면 r=xz+y J+ z k r=r (l, Ci , C2, …, C5) 4-36 가 된다. 여기서 i, j, k 는 각각 x 축, y축, z 축에서의 단위 벡 터 를 의미한다. 보 통 위성이 케플러 궤도 를 그리는 2 체 운동을 하는 경우에는 식 4 - 36 에서 c,. ( k= l . 2, …, 6) 의 값은 일정하게 유지된다 . 그 러나, 다론 질량에 의한 섭동이 존재하는 경우에는 이것은 매우 천천히 변화하는 시간에 대한 함수가 된다. 케플러 궤도에서 C1 t 는 a, e, i, (J), 요, T 또는 이 요소들의 조합으로 이루어지며, 어떤 한 순간의 위성 관측으로부터 c,. 를 구한 궤도를 접촉 궤도 라고 한다. 만약, 그림 4-2 에서와 갇이 중심 질량 m1 의 주위를 질량 m 인 물체가 운동하고 있는 계에서 질량 m' 에 의한 섭동의 영향이 있 다고 하면, 위성의 운동 방정식은 앞에서 살펴본 바와 같이 일
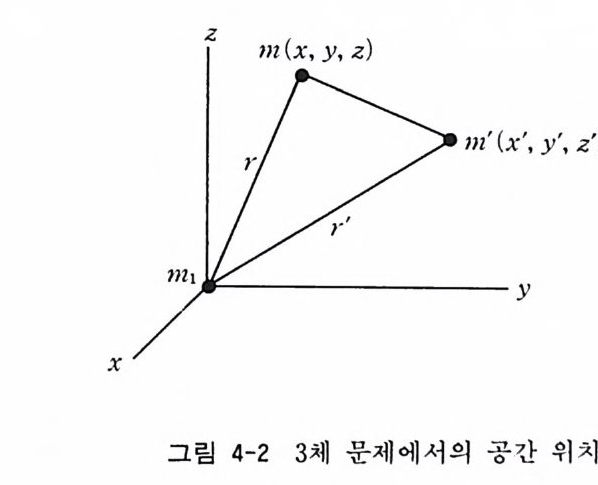 z
z
반적으로 #+r止 =VR 4-3 7 의 형태로 표시되고, 여기서 µ=k2(m1+m ) R=섬 m'( 上p xx'+~ ) 4-3 8 VR= 誓i+뿡J+뿔£ 의 값을 나타낸다. 이제 그립 4-3 과 같이 m 과 m' 이 반경 a, a'(a'>a) 을 가지고 중심 질량 m1 주위를 원운동한다고 가정하고, 이 운동의 x 성분 만을 고려해 보자. 만약 m' 이 없다면 , 짧은 시간 간격 r 에서 질 량 m 은 접촉 궤도 C1 을 따라 운동하므로 Xo 는 그 다음 순간에
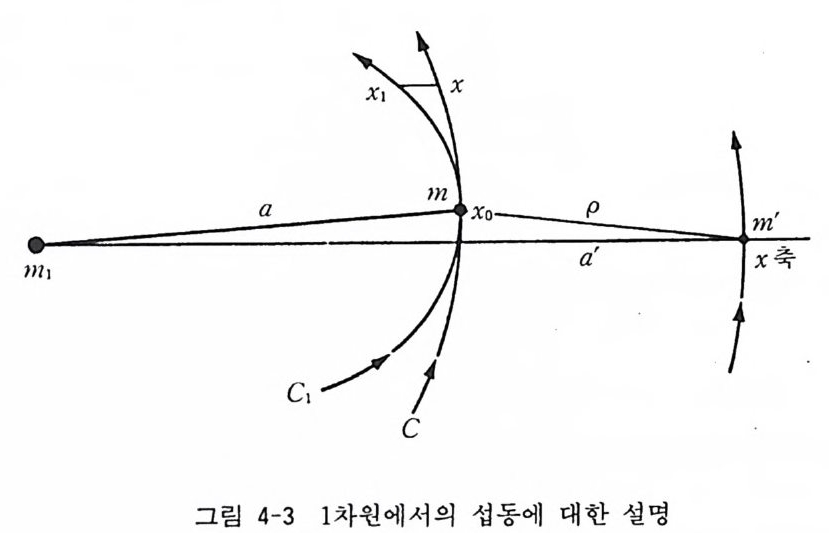 ! m
! m
X1 이 될 것이다. 그러나, 실제로는 m' 의 영향 때문에 m 은 C 를 따라 움직이므로, Xo 는 x 가 되고, 이때 C 는 이 경우에 있어서 실제 궤도가 된다. 이때, 시간 간격이 매우 작아서 x 와 X1 의 값을 충분한 정확도 로 얻을 수 있다고 가정하면, x 와 X1 은 x=xo + 델)。 r+ (열)。f+ ·· · x1 =xo + 傳)。 r + (皇)。-f+ ·· · 4-39 의 형태로 구해낼 수 있다. 이 경우 m' 에 의한 섭동은 x —X1 = & = [(%)。- (틀)。] r+ [(皇)。- (皇)。]f 4-40 으로 나타내어진다. 여기서, 전미분은 실제 궤도, 편미분은 접촉 궤도를 의미하며, 실제 궤도는 궤도 요소들의 변화를 포함한다.
죽, 뿔홉정훑” 의 값을 의미한다. 또한, 접촉 궤도의 정의에 의해 Xo 에서의 속도는 접촉 궤도와 실제 궤도에서 서로 같으므로 델)。-(룹)。 =O 이라는 관계가 성립하고, 이것을 이용하면 식 4-37 은 (1:: )。+뚱=(營)。 4-41 의 형태로 다시 나타낼 수 있다. 여기서 접촉 궤도에 대해 (信)。+탭 =O 4-4 2 의 관계가 성립하므로, 식 4-41 에서 식 4-42 를 빼면 섭동 함수의 변화는 떨)。-(信)。=澤)。 이 된다. 일반적으로 식 4-40 으로 나타난 섭동은 식 4-38 을 적용하여 8x= 강전운)。=강 r li m'(~ _품)。 의 형태로 나타낼 수 있다. 만약 질량들이 매우 근접해 있다면, x'-x 츠 a' -프 나타낼 수 있고, y축과 z 축에서의 섭동은 무
시할 수 있다. 이 경우 시간 간격 r 를 m1 주위를 도는 m 의 주기 P 의 단위로 나타내면, 케플러 제 3 법칙 P2= 4k 군2m a 13 (m1~ m ) 에 의해 섭동은 다음과 같이 표시된다. ox=2 군 a3( 릅)(》『[ (a'] a) 2」 T] 4-43 이해를 돕기 위해 목성 주기의 1/2 의 주기를 가전 소행성에 미치 는 목성에 의한 섭동을 생각해 보자. 케플러 제 3 법칙에 의해 이 소행성은 a=3.3(A.U. )인 궤도 장반경을 갖는다. 이 경우에 있 어서 목성의 장반경은 a'=5.2(A.U.), 이들 사이의 질량비는 부m1 =0.001 이므로, 목성에 의해 이 소행성에 미치는 섭동의 크 기는 8x 탁 0.16( 玉) 2 (A . U . ) 의 형태로 나타난다. 만약, 소행성 주 기의 0.1 %동안 이 섭동이 지속된다고 하면, ox=0.0016(A.U. ) =240000(km) 가 된다. 이런 종류의 섭동을 이용하면 수성과 목 성 궤도 사이의 소행성 궤도 고리에서 나타나는 간격의 원인을 설명할 수 있다. 이를 흔히 Ki rk wood 툼이라고 한다. 이와 비 슷한 현상으로 토성 고리의 카시니 간극을 둘 수 있는데, 이것은 토성의 위성 미마스 (M i mas) 에 의한 섭동의 결과로 생긴 것이다. 다시 섭동 방정식의 일반적인 내용으로 돌아가서, 시간 t의 함수인 Ck 를 포함한 식 4 - 37 로부터 위성의 속도 벡터 #는 戶=불정是 4-44 의 형태로 나타나고, 여기서 Ck 는 다음과 같이 정의된다.
g是 -=O 4-45 또한, 접촉 궤도에서의 속도는 프8=t 호-8t i +쁘8t ? J +쁘8t £ 가 되며, 이것은 실제 궤도에서의 속도 戶 = x z+ y] + z ii와 같 은 값을 갖는다. 식 4-44 를 시간 t에 대해 미분하면 r.: .: =a寄2 Tr +.J 홉..!. 8at82 cr k . 가되고, 이 식을 식 4-38 에 대입하면 인공위성의 운동 방정식은 信-+ µr< 강 ! :t2a:k ¢k =VR 4-46 의 형태로 다시 나타낼 수 있다. 여기서 식 4-46 은 접촉 궤도에 대해서 R=O 이고, Q는 상수이므로 릅 -+~=O 의 관계를 만족한다. 그러므로 이 경우에 있어서 식 4-46 은 결국 설1 :a:k ck=VR 4-47 의 형태로 표현될 수 있다. 또한, Ck 에 대해 식 4-45 와 식 4-47 을 풀면 궤도 요소들의 시 간에 대한 미분값을 직접 구해낼 수 있다. 식 4-47 에서 2 계 편미 분항은
:t28:k =〈(불)=是 로 표시되므로, 식 4-47 은 결국 홀1 望 Ck=VR 4-48 의 형태로 나타낸다. 여기서 식 4-48 과 식 4-45 의 양변에 각각 臺)와 (틀)를 곱하여 빼주면 홀![불·*―if-·불] Ck= 'v R 불 (j=l, 2, …, 6) 4-49 의 식을 얻을 수 있으며, 이때 괄호 안의 항들을 라그랑주 괄호 라 하고 [CJ , Q]로 나타낸다. 이 라그랑주 괄호를 직교 좌표로 서 나타내면 [CJ , Cka(cj], =Ck) I~ a(c+j, Ck~) I +a(cj,~ Ck) 의 형태가 된다. 여기서 aa((cxj,, xC>k) =--- II aaacxxj aaacxxk acj ack 으로 정의되고, 이것은 y와 z 에 대해서도 같은 식으로 나타낼 수 있다. 식 4-49 의 경우 오른쪽 변은 Cj 에 대한 R의 편미분이므로, 식 4-39 는
}J1[C j, Ck] =營 (j=1 , 2, …, 6) 4-50 이 되며, 여기서 이들 6 개 방정식은 ¢ k 에 대해 구해진다. 이 방 정식에서 사용되는 라그랑주 괄호의 일반적인 성질은 다음과 갇 다. [ch cj] =O, [ck, Cj ]= 一 [c j, C 』 i'af [cj, ck]=O 4-51 지금까지 우리는 접촉 궤도와 실제 궤도와의 차이를 이용하여 직교 좌표계에서 인공위성이 받는 섭동에 대해 생각해 보았다. 그러나 실제적인 경우에 있어서 이러한 직교 좌표계는 별로 사용 되지 않고, 대신 2.8.2 절에서 설명한 바와 같은 궤도 평면 좌표 계가 많이 사용된다. 따라서 우리는 지금까지 살펴보았던 섭동식 들을 궤도 평면 좌표계로 바꾸어 주어야 하며, 그 변환 과정을 이제부터 살펴보기로 하겠다. 그립 4-4 에서 P' 은 근일점 방향의 단위 벡터, Q'은 11=90° 방 향의 단위 벡터, R' 은 궤도면에 수직인 단위 벡터라 하자. 그러 면 R'=P'x Q’이 되므로 각 단위 벡터들을 다음과 같이 궤도 요 소에 대한 식으로써 나타낼 수 있다. P'= (cos (J} COS 요 -s i n (J} sin 요 cos i) l Q. '= ++( - ((.ssciionn s (((JJJ}}} scsoiinns i!!)2J -k+~ -c so i ns ((JJ}} ssiinn 요Q ccooss ii)) j?l 4-52 ++ ((c-oss in(J} s(J}i ns iin ) !kJ. + cos (J} COS 요 cos i) J 4-53
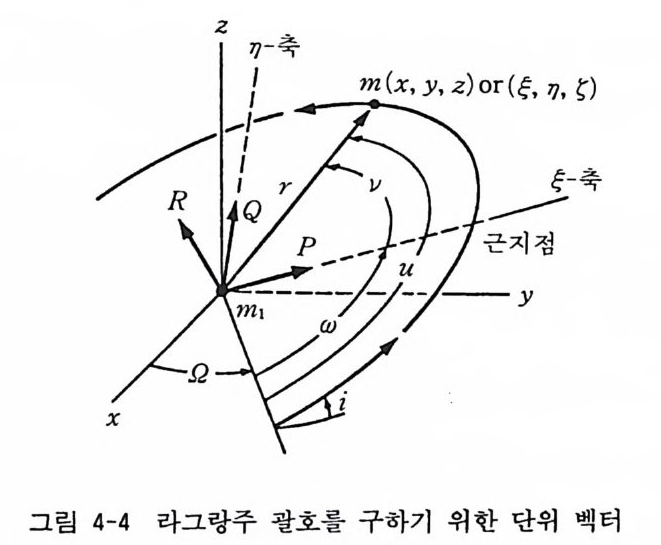 z1 In- 축 —二 (x,` y , z )' o 근-r(지-~-.접 -TE J,- ?축;)
z1 In- 축 —二 (x,` y , z )' o 근-r(지-~-.접 -TE J,- ?축;)
R'= (sin Q sin i) z+ (— cos Q sin i) J+ (cos i) k 4-54 여기서 t, j, i는 각각 x, y, z 축의 단위 벡터이다. 위 식에서 보듯이 이들 단위 벡터들은 궤도 요소 요, (J), i에 의존하지만, 궤도의 모양과 위성의 위치를 정의하는 a, e 등이나, 기준점 통 과 시각 T 와는 무관한 값을 갖는다. 따라서, Q는 각각 3 개씩 두 그룹으로 나누어 줄 수 있는데, 편의상 a, e, T 를 a1, 따, a3 라 정의하고, 요, (J), i를 BI, B2, B3 라 정의한다. 이 경우 라 그랑주 괄호는 [ar, as], [ar, fls], [fln fls] (r=l= s ; r, s=l, 2, 3) 의 세 가지 로 나누어 표시 된다. 식 4-52, 4-53, 4-54 를 다시 간단히 하면 PQ''==QP1i zz ++ QP22 J1 ++ pQ;; kf R'=Ri t+磁}+印i 의 형태로 나타낼 수 있으며, P', Q', R' 의 각 성분들은 x, y,
z 축과 이루는 방향 여현을 의미한다 (McCuske y 1963). 결과적으로 어느 한 순간의 위성의 위치 벡터는 r =xl+y J+ zk=; P'+ r; Q' 4-55 으로 표시할 수 있고, 여기서 5 와 n 는 궤도 평면 좌표계의 성분 을 나타낸다. 또한, 속도 벡터는 식 4-55 를 시간에 대해 미분해 줌으로써 t = x z+ yJ+ z ii= tP' + ~Q'+ tP + TJQ' 4-56 의 형태로 나타낼 수 있다. 접촉 궤도의 정의로부터, 戶=8―87t 이 므로 ~P.... '+ 77Q .... ' =O 이 되고, 이것을 식 4-56 에 대입하면 t=tf>+ 찌 4-57 y처, 럼y ,간 단z, 하갔게는 표 새현로할운 수좌 있표다 .E , 식g , 4-n5,6 과力 로식 나4-타57낼 로 부수터 있x으, 며i, , 또한 라그랑주 괄호 [ar, as] 의 정의로부터 [ar, as]= a8((axr,, ia)s) +I a8((ayr,, yas)) +I a8((azr,, zas)) = 8888aaixTT aaaaaaxxss I1II + 1III aaaaaayyrr 훑 읊+ 훑튤aaaaaazzss 4-58
가 된다. 또한 x 성분에 대해 (:;), (〔:)는 각각 —ac)a_x r =-—aa x~ -aaa~ r +'' —aaxr; — aaa— r;r aaaxr = 보a~ 흐aar+ ' a료~ 오aar 의 형태로 나타나고, 여기서 —aax~ = P,.....1.. ,, —aaxty = P1 호a=n Qi, 오8n후 =Q ; 의 관계가 성립하므로, 식 4 - 58 의 x 항은 (P i틀+Qi틀) (P i틀+Qi麟) (P 를+Q틀) (P 댈~+Qi틀) 로 바꾸어 나타낼 수 있다. 이는 y와 z 의 항에 대해서도 같은 모양을 갖는다. 이들 방향 여현둘은 일반적으로 상호간에 Pi2 + P22+P32=l Qi2+Qz 2+Q ? =l PiQ i + P2Q z + P3Q 3= Q 의 관계를 가지고 있다. 그러므로 식 4-58 에 주어전 라그랑주 괄 호는
[ar, as]= 효aaaaatrr 꿉aaaaatss III + III 호aaaaaTrrJ 蠶훑
= a8((aEr,, ta)s) +I a8((anr,, a力s)) 으로 나타낼 수 있다. 그림 4-4 에서 E 와 n 의 정의와 식 2-2 0 , 식 2-21 에 의하면 ~=r cos v=a cos E-ae 4-59 1J= rsin 11=asin E~ 4-6 0 의 형태로 표시된다. 여기서 자코비안을 계산하기 위해 평균근점 각 M=n (t -T) 가 매우 작다고 가정하면, 케플러 방정식 E-e sin E=n(t — T) 에서 s i nE 를 급수 전개시키고 3 차항 이하를 무시하여 E3 E ― eE+e 힌 =n (t -T) 라는 관계식을 얻을 수 있다. 또한, e 가 아주 작은 경우 eE 와 eE3 은 무시할 수 있으므로 위 식은 E= n(t- T) 1-e 의 형태로 간단히 나타낸다. 여기서 만약 E~l 이라면 sin E~ n(1t__ e T ) cos E=1_T1 sin2 E=1_ n22((1t-_ T e))22이 되고, 이 관계로부터 ~=a[1-~ 『]― ae 7]=~— T) =na 鬪言(t― T) 의 값이 계산된다. 또한, 위 식을 시간에 대해 미분해 주면 £= —(1n _2ae) 2 (t _ T) i; =na 鬪言 의 값도 역시 얻을 수 있다. 여기서, 케플러 제 3 법칙에 의해 n2a3=µ 의 관계가 성립한다. 이해를 돕기 위해서 예를 들어 [ar, as]=[a, e] 라 하면 릅 =[1 ― n;{ i-― e〈 『 ]+a[ ― n( 틀1 )~ te :2T)2]-e 의 형태로 표시되고, 이 식은 t =T 에서 (틀)t =T=l ― e 의 값을 갖게 된다. 같은 방법으로 (틀)t =T= 훑[걸(仁 :))2l=T=[~ ―김 ]t=T =O (틀)t =T=[-~-al=T=-a (틀)t =T=[-~?~l=T=O
의 관계식을 쉽게 얻어낼 수 있다. 그러므로, 자코비안은 결국 迅a(a요, 요e) =O 의 값을 갖게 된다. 또한, 다른 성분들에 대해서도 (틀)t =T=O, (틀)t =T=- 꿍겁 (틀)t =T=O, (틀)t =T= (1 ― e;1 도 의 값을 얻을 수 있으므로, 問 ~=O 이 되고 이것을 통해 [a, e]=O 이 됨을 알 수 있다. 같은 방법으로, 나머지 궤도 요소들에 대해서 섭동 방정식을 구하는데 필요한 라그랑주 괄호를 구해 보면 [요, a] = na cos ;平 [(J}, a]=~ 尸 [e, 요]= naa2e cos i 4-61 [e, (J}]na=2e瓦 [i, 요] = -n a2 sin i ./f=e2 [a, T]= 亨
의 형태로 나타나고, 나머지는 모두 0 이 된다. 만약, 궤도 요소 T 대신에 6=_nT 를 사용하여 나타내면 [a, a]= 問 의 값을 얻을 수 있다. 일반적으로 식 4 - 61 에서 처음 4 개의 괄호 는 [ar, /3 s] 형, 5 번째는 [/Jr, /J s] 형, 마지막은 [ar, as] 형이라고 흔히 불린다. 4.2.2 섭동 방정식 우리는 앞 절에서 인공위성의 섭동을 구하고 그것들을 궤도 평 면 좌표계로 변환하는 방법에 대해서 살펴보았다. 이 절에서는 논의를 보다 더 발전시켜서 앞의 방법을 이용하여 인공위성이 받 는 섭동 방정식을 구해 보고, 새로운 세 단위 벡터 IR', §', W' 를 도입하여 이 섭동 방정식을 일반화시켜 보도록 하겠다. 식 4-61 을 식 4-50 에 대입하고, [ck, c;]=-[c;, ck] 의 성질을 이용하면 이들은 —21 naa. = a8R(J (½na~ 曰麟 )e= 뿔 (강 na cos 홉구) E ( 강펼 L) e — ( na2 sin 這구) 뿔 _뿔 (na2sin 這구)g=뿔 4-62
(-½na cos i平)g _(½na 平 )w - (½na) iJ=誓 (강롭情+(二 )w= 뿡 의 형태로 다시 표시할 수 있다. 그러므로 시간에 대한 미분은 a. = n2a aaRa 4-63 e=( 冒e 2) 誓_(?.)뿔 4_64 d=(_ 1n-ae2e2 胃j ae― 요na 뿌aa 4_65 Q=( na2s i n11· 투멉 4-66 m=( na2 s-icn o is /i i구 胃ai+ 1 (\ n工a2e리 j 쁘ae 4-6 7 뿜=( na2s:n? 노미뿔( na2s i n1這 구)醫 4-68 이 되며, 식 4-65 를 이용하여 평균근접각 M=n( t- T) =nt+ 6 룰 나타낼 수 있다. 이것은 결국 섭동 방정식을 R(a, e, (JJ, i, 요, M) 의 형태로 쓸 수 있다는 것을 의미하는데, 이는 R 가 M 으로 나타낼 수 있는 시간과 T 에 대한 함수이므로 가능하다. 여기서 평균근점각 M 을 시간에 대해 미분하면 M=n+ nt+ a=n+ 뿔 a t+ a 의 형태로 나타내어진다. 이때, d 는 식 4-65 에서 주어지며, 이 식을 이용하기 위해서는 먼저 강:의 값을 알아야만 한다. 휩흡는
케플러 제 3 법칙 µ=n½a 용에 의해서 M=µzI a-t3 t + a 이 되므로. 誓=(첼 )M+ 겔뿔=(핑江+(一붕)醫 4 一 69 의 형태로 표시된다. 또한, 식 4-69 와 뿔=―맵를 이용하면 평균근점각의 시간에 대한 미분은 M=n-l; 『 -(~;)誓 -¾(¥.-)M+ 픕핼 의 형태로 다시 나타낼 수 있다. 그러나 식 4-63 으로부터 d= 굶2 寄aR= 志2 詞aR 의 관계가 성립하므로, 이 식을 위에 대입하고 마지막 항을 무시 하면 M=n-(~ 邊一글뿔 )M 4-70 d= 占훑 4-71 이 된다. 이 식에서 M 이 6 대신 사용될 때는 식 4-65 와 식 4-63 을 각각 위 의 두 식 4-70 과 4-71 로 대 체 하여 줄 수 있다. 지금까지 우리는 인공위성이 받는 섭동의 방정식들을 스칼라 양으로써 나타내어 보았다. 이제 이 논의를 좀더 일반화하여 새 로운 세 단위 벡터들을 도입하고 이를 이용하여 섭동 방정식을
구하여 보도록 하자. u구 을 r 방향의 단위 벡터, u; 를 궤도 평면 에서 r 에 수직이고 V 와 g oo 보다 작은 각을 이루는 단위 벡터, t a 를 궤도 평면에 수직인 단위 벡터라 할 때, 이들 사이에는 uA=u--;.X u 11 의 관계가 성립한다. 만약, u= (JJ+ v 를 중심과 승교점을 연결한 선에서 동경 벡터까지의 각이라고 하면, 인공위성이 받는 힘은 F一 = IR'u_r +§ 'u'e + W'uA 4-7 2 가 되고, 여기서 단위 벡터들은 직교 좌표계에서 다음과 같이 나 타낸다. iir= (cos .Q cos u-sin .Q sin u cos i) z + (sin .Q cos u +cos 요 sin u cos i) j iie= (+- c(soins .uQ ssiinn i u) —k sin .Q cos u cos i) i + (-sin .Q sin u+cos .Q cos u cos i) J iiA= +(s i(nc o .Qs sui ns i in) iz)+ k ( —cos 요 sin i) J+ (cos i) k 이 경우 섭동 함수 R에 의한 가속도를 성분별로 나타내면 VR= 뿔;+磐J+뿔i 의 형태로 표시할 수 있다. R 에 의한 힘의 성분들은 편미분 짚aa ' 낌ae 등의 모습으로 섭동 방정식들(식 4-63~ 식 4-68) 에 적 용되며, 새로운 힘 F 로의 전환은 비교적 쉽게 이루어진다. 만약 C가 궤도 요소들 중의 하나롤 나타낸다면 다음과 같은 식을 얻
어낼 수 있다. —a8Rcj =V, ...,R,.., ·—a8 crj r= 죠+yJ +zk 위의 두 식은 결과적으로 언ac :j =F,. · 요acj 4-73 의 형태로 단순화시켜 나타낼 수 있다. 지의한 편예 미로써분 들힘을 의 이성용 분하 여IR ', ::§ '를, W구'해 과보,자 .식 식4- 634 -에5 5서 로 부식터 4 -71 까 r= 안)'+ 7]Q' 의 관계가 성립하므로, 위치 벡터의 반장경 a 에 대한 편미분은 끄aa =P~ ’ 延aa - +'QG :' a~a 이 되며, 여기서 P’ 와 Q’는 그림 4-3 에 나타낸 것과 같이 단위 벡터를 의미한다. 위 식은 식 4-73 의 우변항과 같은 형태를 취하 고 있으므로 이것을 식 4-73 에 대입하면 우리가 구하고자 하는 편미분의 값을 다음과 같이 얻어낼 수 있다. 誓 =F·P’ 릅 +F· Q'틀 4-74 이제 남아 있는 과정은 식 4-74 의 우변항들을 구하는 것이며, 이 값들은 식 4-59 와 식 4-60 에 의 해
효8a =cos E-e=s_a_ _ , ~8a= sin E If구=꼬a 4-75 의 형태로 얻어낼 수 있다. 또한, 식 4-62 에서 F= JR. 'u-;.+§'u걸 +W'uA 의 관계가 성립하므로 F·P'=IR.'c os v— §' sin v, F·Q' = IR.' sin v+§'cos v t= r cos v, 77= r sm v 의 값을 얻을 수 있다. 위 식들은 결국 F- • P;:;,' =-1r( IR'5— §'TJ) 4-76a F · Q'= +-r< 1R'TJ + §'~) 4-76b 처럼 단순화시켜 나타낼 수 있다. 이제 위에서 얻은 식 4-75 와 식 4-76 을 식 4-74 에 대 입 하면 최 종적으로 莖aa =IR'' .aI_ 의 형태가 되고, 이상과 같은 방법으로 다른 편미분들도 모두 구 할수 있다• 誓=_IR. 'acos 莊 S'as i n v 〔巨 a ( 1: 강) ] 8R IR'ea sin \S'a2 石구 言= g구 r 函8R =S'rcos i- W'rsin ic os u 4-77 쁘8(L) =S'r
寄aR =W'rs i n u 위에서 얻은 값들을 식 4-63 에서 식 4-68 까지의 방정식들에 대 입하면 우리는 각 궤도 요소들의 시간에 따른 변화율을 다음과 감이 모두 구할 수 있다. d = n2e ~sin• I.I I-R'+' 2a frn구 S' 4-78 e=sm I.I n: 구 IR' 十 ::[a2(1 ― ~]s' 4-79 6=[ (1_:2;eCOS I.I ―풀 ]IR'_ (1— ::e sin I.I[ 1+ a(1:e2) ]s 4-80 g = a2nsr ins m 깁 u 言2 W 4-81 m= -cosaI .nI 尸 +sin Ia.I :[1+ a(l:e2) ]S' _ ra: 麟n 룬 밑. W' 4-82 쁘dt= - a~2nW~ ' 4-83 식 4-78~83 에 따르면, 요와 i에 의해 주어지는 궤도의 부분적인 변화는 W' 성분을 가진 섭동력, a 와 e 와 6 는 R 과 S' 의 섭동 력이 가해질 때만 변한다는 것을 알 수 있다. 실제 위성 문제에 섭동을 일으키는 주된 힘은 제 3 의 물체에 의 한 섭동과 편구에 의한 섭동이다. 게다가 많은 인공위성 궤도의 경우 대기항력의 영향도 받게 되며, 편구와 제 3 의 물체에 의한 섭동이 보존되는 데 비해 대기항력은 보존되지 않는다. 따라서,
일반적으로 다음과 같은 두 가지 형태의 섭동 방정식이 실제 문 제에 많이 적용된다. 하나는 라그랑주에 의해 발전된 것으로서 섭동력은 스칼라의 변화로 쓰인다. 다른 하나는 가우스 (Gauss) 에 의해 발전되었으며 더욱 일반적인 것으로, 서로 다른 세 단위 벡 터에 의해 설명된 섭동 방정식의 형태이다. 4.2.2.1 라그랑주형 섭동 방정식 라그랑주는 섭동력을 속도에 무관한 스칼라 양으로 나타내어 이 섭동력에 의한 각 요소들의 변화를 구하였다. 이 절에서는 궤 도 요소들을 다음 10 가지의 경우로 변화시켜 각 경우에 대한 섭 동 방정식을 결정하였으며, 그 개략적인 결과들을 기술하면 다음 과 같이 나타난다 (Taff 1985) . l. a, e, (1), i, 요와 T[M=n (t -T)] 를 이용 ti=—2µa—2 oo—RT e=— µL2—2e —o8RT _ (1e-L 강 ) _8a_(R /) 0= (l;L장 ) (笠 言:' 짱) 4- 84 뿔=뚜.L (cos i邑醫) Q=트L 브華8t t=µ꼬 호aa +I 上µ2e: a호e 2. a, e, (/), i, 요와 6=一 nT[M=n t +a] 를 이용. 이 경우 단 d, ¢, t의 방정식만 변하고, 나머지 것들은 1 과
같은 형태를 갖는다. a. = n2a 88R6 e=~ 뿔 -(1µ-aee:) 년 4-85 6=-((µ 1ae-2e)2 1) 12 —aaRe — —n2a _aaR_a 3. a, e, (J}, i, 요와 島 [M=nU- to ) +Mo] 를 이용. . 2 aR a= 詞詞 e= 1n —a2ee2 8aMRo —(1 n-a2e2e ) tI —aaR(J} 硏=― coLt i 힙a노i -' (ln-ae2 e恒 I 합ae 4-86 쁘dt =또L 무a(인J} -L무 잎a 요 QMo==-L흐 na합82ie —ae _—na —aa (l-e2) aR 2 aR 4. a, e, w, i, 요와 c= w+a[w= (J}+요, M=n t +a] 를 이 용. a. = n2a ooRc e= -무후 cos ¢t an( 운) 革 na2 ow ' na2 oc
젊 = Cn0a 나2 쁘8e + t an 信n).a 2 s ec ¢ a—Rai 4-87 쁘dt= -- csc nias2 e c ¢ 낌a요 i _ tan ([ ]2sec¢ ( 普룹) Q = csc nt aS~: c ¢ 述ai .c = —2na 誓 + c。 s ¢ tan(2In`운 a`J\ _,, _ 誓+ t an( 숭na )~ 2s ec ¢ 述oi 여기서 e =sin ¢의 값을 갖는다. 5. 독립 변수로서 진근점각 y를 갖는 a, e, (J), 1, 요와 Mo[M=1'l (t—to) +Mo] 를 이용. 皇=古信 )2 (1 ― 1강 )1/2 읊 총= (1 급: :1/2 (;『織 7 노(덩픈 dd(vJJ = n2a 털:;:강) 信 )2 誓+ n2 노(니誓 4-88 ddvi = :운국디멜- n2a?e2) (니겔 썩d n흙 詞孔텁떨 뿡v =-告亭집앨 #a(1 2군 )ll 石/ r)\2 志aR 6. 이심률이 작은 경우, ec=e cos w, es=e sin w 인 경우. 앞의 4 번 경우에서 단지 e, 5 의 방정식만이 변화한다.
7. 궤.e도.es =경사다一eos 각e¢gcc이 1=s 1伊:¢2작2』2a 이sceReeasse이莖e 은 ¢s2 ece c경 Io1t우Ia¢sr,1 s —2tang岭―a―RuaRac a c 2p (2 \=―2이 l1.\1c21/ 2 ss \1 e,i -_ne\C 1 )e i1¢s 2s l ¢i (¢n 誓 Q)— S챌 , cq2 l= 2 sin i c o4s-8Q 9 인 경우. 4 번의 경우에서 겅}, g의 방정식만이 변화한다. ) = cos( µia s)e 11c2 ¢ 쁘aq p cos i 2se (cµ2a () 숭1l2) sec (I aR志 ,+ aR걸 4-90 q, =_ _ cos( µia s)e 1cl2 ¢ 겅iJR q cos i 2se (cµ2a () 1숭/2) sec (I aR詞 ,+ aR길 8. 궤도 경사각이 작은 경우, P=t an is in Q, q=tan i cos 요 인 경우. 4 번의 경우에서 겅~, .Q의 방정식만이 변화한다. pq==-뿌Lse c후L3 i쁘a q商a R p sqe c et. Ssec2Z(L _2.etSc)22 .2t(_2 i_! Lc`醫) (`( —a+w a뿔+ R言aR ) \' _) _ 4-91
9. 이심률과 궤도 경사각이 작은 경우, ec=e cos w, es=e sin w, P=s i n i s i n 요, q =s i n i cos 요인 경우. ci., i의 방정식 만이 변화한다. ¢s= COnSa2¢ 뿔+ ec COt t t an\\ 강) sec ¢ (폴+q營) — esCOS 少 sec2 信) 革 2na 8c ec= _털뿔_ esCOt it::숭 )sec¢ (폴三) ec Cos ¢ sec2 信) 莖 2na 8c p= cos nias2 e c ¢ 革dq 4-92 _ p cos t se2cn2a\숭 ) ~ (ec 塾+ e 훌룹) q=_. COS nt as2 e c ¢ 莖ap q cos i s~뀝 sec¢ (틀틀룹) 10. 이심률이 작은 경우, ec=e cos (/J, es=e sin (/J, x=(/ J _nT 인 경우. ci =2 信)상뿔
¢s= (1 ―L궁 ) —aaeRc _ ec cLo t i —aaRi ¢c=_ (1 군L ) 産8es나 ecCLo t 1· 筑ai _ L[1 e+c ((11 구_ )e2) Il2] 한8:x 뿔 =L-1[co t i (ec 뿔― es 笠+뿔)― cos 겔] 4-93 Q=L호 한ai X.= L[l+\; :2e 2) 때(틀 +e 훑 )_2 信)년_ cT 뿡 4. 2. 2. 2 가우스형 섭동 방정식 가우스는 일반적인 문제들을 다루키 위해서 라그랑주의 방정식 둘을 더욱 확장시켰다. 그는 인공위성에 작용하는 섭동력을 크게 3 개의 수직 성분으로 나누고 이것들을 다음의 방법과 같이 새롭 게 계산하였다. 이제 I R.’을 동경 벡터의 성분(반지름의 거리가 증가하는 방향 이 +방향), S' 을 궤도 평면에서 IR' 에 수직인 성분(경도가 증가하 는 방향이 +방향), W' 을 궤도 평면에 수직인 성분(궤도 운동이 반시계 방향으로 나타나는 방향이 +방향) 이라고 정의하자. 또, r 울 동경 벡터, A 를 경도, z 를 궤도면에 수직인 좌표라 하면 섭 동력의 각 성분들은 IR'= 慕 S'= 뿔 w= 뿔 의 형태로 표시가 된다. 또한 a 를 6 개 궤도 요소 중의 어느 하 나라고 가정하면
莖aa= 안ar호 aa+ ' 革aJ썬 a-a +' a안z 호aa 라는 편미분이 성립하며, IR', S', W' 의 항으로 이루어진 위 식 울 계산하기 위해서는 타원 운동의 경우에 있어서 각 궤도 요소 에 대한 r, 11, z 의 편미분을 구해야만 한다. 이러한 경우 일반 적으로 흔히 사용되는 a, e, (J}, i, 요, T 의 궤도 요소들을 사 용하는 것보다는 a, e, w(=( J}+Q)i, 요, E(=M+w-nT=w _nT) 로 정의된 새로운 궤도 요소를 사용하는 것이 더 편리하 다. 이들 편미분들을 계산하면 다음과 같은 결과를 얻을 수 있 다. —ddar =ar- ' —a der =_acos v —8<1a,1 = 2+1e_ ceo2s v sm. 11 훑=룹 (1 구 )1/2=~?: 겁 )2 函a-r = (1— a~e si.n v , aar& =―a꿇r —a8@A = 1— 88—Ac ' —88gA = _1+cos i 또한, u=v+(/} 로 나타낼 수 있으므로 수직 좌표의 변화량 dz 는 dz=r sin u di- r cos u sin i dQ 가 되고, 이런 관계식들을 이용하면 각 궤도 요소에 대한 섭동함 수의 변화는 결과적으로 oR r oR aa a or
뿔=― acos 홉-+(占三 )s i n 첼 a8R1. =r sm. u a8Rz 誓 = 『-빨)盆 誓+릉 (1 구 )1/2 뿔 4-94 普= 갑 e― s ;?) :誓 +[1 ―판 (1 군 )1/2] 뿔 뿔= -r s in i cos 룹― 2 sin 2 (망)뿔 과 같은 형태로 얻어진다. 위 식들로부터 각 궤도 요소의 시간에 따른 변화량을 구해보면 다음과 같이 나타난다. 뿜= n(1: 강 )m(IR'es i n 11+ 군) —ddet = (l 구na )1 /2 [IR' sin v+§'(cos £+cos 11)] 간d-i = na2(1 군1 )mW'r cos u 뿜= na2 ?1뜨 ;2)1/2 W'r sin u 4-95 툼= (1— nae:) Il2 [— IR'cos 11+§'(j +1 ) sin 11] +2 펩 s i n2 (강) 뿜=_픕 IR'+ 1+(1e:g l/2 툼 +2(1 군 )1/2 뿜 s i n2( 송) 여기서, P=a (l_강)의 값을 갖는다. 이 밖에 다른 경우들에 있어서도 지금까지 설명한 과정을 그대 로 적용할 수 있으며, 여기에서는 그 과정을 생략하고 아래에 그 결과들만을 간단히 제시해 보도록 하겠다 (Ta ff 1985).
1. a, e, (J), i, 요와 <1 =-nT[M=n t+<1]를 이용. d = n2(e1 _sien 2 )V Il2 'R.'+ 2a (1 n군r) Il2S' .e (1 군 ~I R.'+~(완 r)s' m=_ (1 군; ;~IR'+~s i n 1.1 (1 급)§' —rs m. Lu cot t. w 쁘dt = rsLin u w 4-96 Q= r cscl.s.m u w d=- 』;_ (1-e2:cos v]IR'- 노白 ~1+ -f )s 2. a, e, w, i, 요와 c=w+a[w=(J )+Q, M=n t +a] 를 이용. a=~e lR. s i n11+ 處) e = (1-nea2) Il2 [IR' sin v+(1e++e?。 ~ )s'] 젊 =2Q sin 2 (강) + (1 —~[-IR' cos 11 + (1 급 )S' sin 」 쁘dt =rcLo suw 4~97 Q= r csclsm u w e=- 풀 E'+ 1+ (1e군 2 )1/2 젊 +2 .Q (1 구 )ll2s i n2 (당• ) 3. 또다론 형태로서 e=sin ¢룰 이용.
d= 군 )½[IR' t an ¢sin v+§'sec ¢(1+ ecos 11)] e= 군 )½cos v[IR.' sin 莊 §'(cos v+cosE)] 젊 = cs::l: 가 _ alR.' cos 나 cos 1.1 + r§' (2 + e cos v) sin 1.1 + rW' tan (선 sin ¢ sin u] id=t rWs(eµca) ¢1 12c os u Q= ~(µa) s1,2 in u 4-98 C = —(2µ raE'l 2 + 2 젊 s i n 信) + 2 Q cos ¢ sin 2 (王) P =2 r(?)½§, cos ¢ n = -~[IR.' sin ¢ sin v +§' (l + e cos v) ] 6 = (?a\ 沼~ [ (a cos2 ¢ cos v— 2r sin ¢) IR .'-r §' (2+ e cos 11) ] 4.2.3 섭동 함수 이 절에서는 섭동을 미치는 인자에 따른 섭동 함수 R 을 각각 의 경우에 대해서 구해 보도록 하자. 여기에서는 먼저 축대칭인 물체의 편구에 의한 퍼텐셜의 형태를 소개하고, 위도 l 과 경도 L 인 지구에 대해 퍼텐셜을 나타내어, 이를 다시 위도만의 함수 인 zonal harmon i cs 와 주로 경도에 의존하는 tes seral and secto ria l harmon ic s 로 나누어 정의하였다, 또한, 위성에 대해
섭동을 미치는 제 3 의 물체에 대한 퍼텐셜의 형태를 정의하고 이 때의 운동방정식을 간략하게 소개하였으며, 마지막으로 위성체에 미치는 대기항력과 태양의 복사압력에 의한 섭동 함수를 구해보 도록 하겠다. 4.2.3.1 편구에 의한 섭동 일반적으로 어떤 축대칭인 물체에 대한 의부 퍼텐셜은 U(r, 0, ¢)=r도 [1- in=22 ~] 4-99 의 형태로 주어전다. 여기서 z 는 대칭축으로서 z=r cos 0 의 값 울 갖고, m 은 총 질량, r 은 질량 중심에서 구면 좌표 r, 0, ¢ 인 임의의 점까지의 거리를 나타낸다. 이 경우에 있어서 축대칭 으로 가정하였기 때문에 식 4-99 는 ¢에 의존하지 않으며, 또한 질량 중심을 원점으로 하기 때문에 U 에 n=l 인 항이 존재하지 않는다. (더욱 정확하게 말하자면 이 항은 0 이 된다.) 만약, 이 퍼텐셜을 위도 l, 경도 L 인 지구에 대해 나타내면, U(r, l, L) =~[1 정 효 (~rPnm (sin l) ( Cnm cos mL + Snm sin mL) ] = Gmr 터 + Uz(r, l) + U1(r, l, L) 4-100 의 형태로 나타나며, 위 식에서 사용되는 상수들은 Gme=3 . 986005 x 1014 m3/s2=1. 407646853 x 1016 ft3/s 2 Re=6378 .16 km=2 . 092572178 x 107 ft
와 같은 값을 갖는다. 식 4-100 에서 Uz(r, l) 는 위도 l 의 함수 로 나타나는 퍼텐셜의 zonal harmonic 부분을 의미하며, 위의 상수들을 이용하면 그 값은 다음과 같은 형태로 주어전다. Vz(r, /)=-~ 홀 ]n( 은 )nPn(s i n l) 4~101 위 식에서 만약 m=O, ]n= ― Cno 의 값을 갖는다면 이 경우 식 4-101 은 Uz(r, l) = -ii7 fil -[Ji(전 )2R(s i n l) +k( 전 )3A(s i n l) +…] 4-102 처럼 풀이하여 나타낼 수 있다. 반면에 U1 (r, l, L) 는 경도 L 에 의존하는 함수로 t esseral 과 secto ria l harmonic 부분을 의 미 한다. 이 함수는 U1 ( r, l, L) =~r nnt=OoO o mmt=O 톤 )nPnm (sin l) ( Cnm cos mL +Snm sin mL) = Gmr ° (\ ~r yA2 (sin l) ( C22 cos 2L + S22 sin 2L) + … = —G ?e 론 )23 cos2 tlcfi+효 (~這- cos 2L 十 k:? 료 sin 2L) + … 4-103 = Gmr e (\& 1r -)33 JJ 2> cos2 l cos (2L— 2a ) +… 의 형태로 나타낼 수 있으며, 여기서 Ji 2) 는
I}2)= ― ✓ 璃 +S% = —j(l.5 78 X 10-6)2+ ( 一 0 . 905 X 10-6)2 =― 1.819 X 10-6 국 의 값을 갖는다. 위 식에서 B 는 지구 적도의 편평도로, /3= aeq - beq aeq 의 형태를 나타내며, 또한 식 4-103 에서 a= 강t an-•( 三S\ 22 =75 °18 ✓ c g 2+S g 2 의 값을 갖는다. 만약 지구를 적도면에 따라 절단했다고 가정할 때, 지구 적도면에서 지구 중심으로부터의 거리 r 과 적도면에서 의 장반경과 단반경의 차이는 16reJq f. s >u Rrf aE B c =e6~9R .e 6 +( m3)J f= >2 C2O8S (f(t2) L= -a2e9a —) abEe!l q 로부터 얻어낼 수 있다. 또한, 지구 형태에 대해 지구의 장반경 과 단반경의 차 ae-be=2l(km) 에 의한 J항의 값은 다음과 같 이 주어진다. ]2=1087.10-m6 呼=~ e =으3] k= ― 2.56X10-6 국 C; 仁춥 H k= —1. 5 8 x 10-6= -告 K= 툴
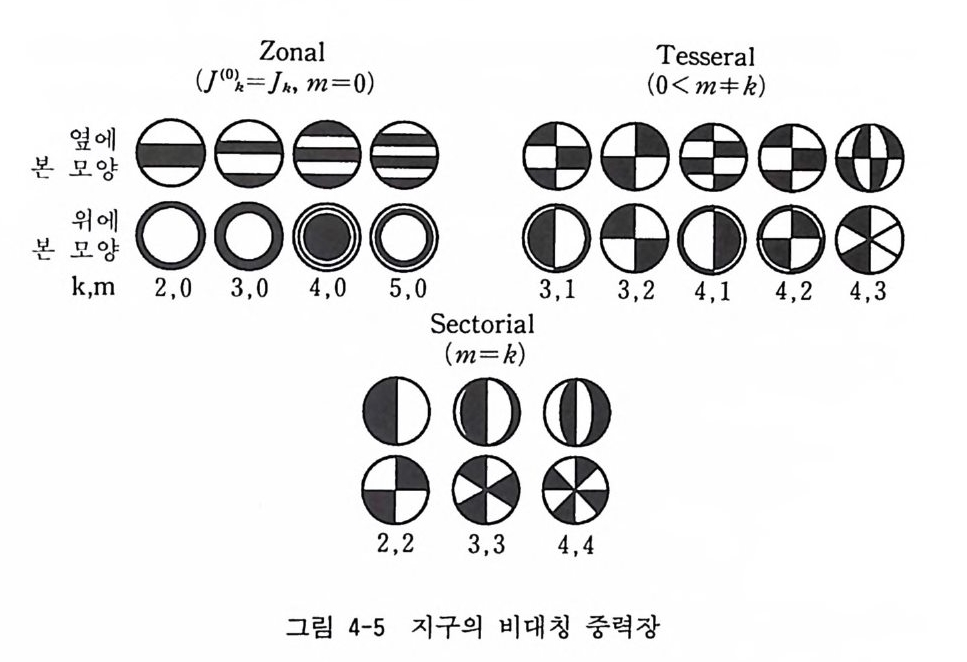 (]<0~= ZJ o,.n, aml =O) (OTe
(]<0~= ZJ o,.n, aml =O) (OTe
여기서 C, A, H, K, D, J항들은 이전의 퍼텐셜을 나타내 는 상수이다. 지구 중력장에서 섭동을 미치는 J2, J3, J4 항에 대 한 도식적인 이해를 돕기 위해 그립 4-5 에 각각의 형태를 나타내 었다. 4.2.3.2 제 3 의 물체에 의한 섭동 일반적으로 위성이 섭동을 받지 않았을 경우 그 위성은 원 궤 도를 따라 움직이게 되며, 이 경우에 다음과 같은 식으로 그 위 성 의 궤 도를 나타낼 수 있다 (Taf f 1985) . r = a, 11=p2 'l(•t 24 'jl(far3 =µ= GMe 여기서, v 는 전근접각을 의미한다.
만약 궤도 평면에 섭동을 주는 질량 Mp 가 놓여 있고, 그 질량 이 지구 주위를 원 궤도로 돈다고 가정하면 이 물체의 궤도는 rp= ap, l)p= 閃 +¢, 맡=µ 로 나타낼 수 있으며, 이때 ¢는 임의의 위상을 나타내고, ap » a Pp ~P 의 값을 갖는다. 이 경우 섭동을 미치는 물체가 위성 의몇 번의 공전에 대해 고정되었다고 생각하면 이때의 퍼텐셜은 u= _쓰r _ I YGp M—P r l µ_r [a 伊+ ?/2 _ 2raGPM CPO S (I/— 미 ]1l2 4-104 의 형태가 되며, 위성의 운동 방정식은 #― r 訖=_ aaur ' rii + 2 r ii = -—1r a8uu 와 같이 나타낼 수 있다. 만약, 섭동체가 정지 상태라면 위의 식 은간단하게 戶국도읍+(信 )cos (11-
의 값을 기지므로, 이들을 운동 방정식에 대입하여 c 에 대해 선 형화하면 #1_ 12;2m _ 47 [:il = 信) cos (擊규) a ii I+ 부=― (7)s i n( 뭉기 의 식을 얻을 수 있다. 여기서 초기 조건은 r (O) =a, 1.1 (0) =O r1 (0) = 111 (0) =O r (0) =O, Ji (0) =樣 또는 f1 (0) = ii1( 0) =O 으로 주어진다. 위 식에서 l/ I 의 방정식을 적분하여 rl 방정식에 대입하고, 이룰 두 번 적분하면 -fz= l +c[B cos (꿉마(릉) sin (루 가 2 cos 니 u= 擊― c{2B sin (부仁야(유 )[cos (유기 +cos 니 +2sin (뿔규 )+5s i n 나 의 식 이 얻어지고, r1(0) =O, ii10 ) =O 와 r1(o) =O, 1.11 (O) =O 의 조건으로부터 적분상수 B 와 ¢는 다음과 같이 결정할 수 있다. B cos ¢=2 cos
동량 등을 중심으로 하여 자세히 알아보도록 하겠다. 4.2.3.3 그 밖의 요인에 의한 섭동 우리는 지금까지 4.2.3 절에서 인공위성의 궤도에 섭동을 일으 키는 요인으로서 지구의 비대칭 중력장과 제 3 체의 영향에 대해서 알아보았다. 그러나 인공위성의 궤도에 섭동을 주는 요인에는 이 들 두 가지 만이 있는 것은 아니며, 이들 의에 대기항력, 태양의 복사압력 등의 영향이 존재한다. 이 절에서는 이들의 영향에 대 해서 간단하게 살펴보기로 하겠다. 먼저 대기항력이 인공위성에 작용하는 섭동력은 FD=A?tc DP | V_ V니 ( Va-V ) 4-105 의 형태로 표시된다. 여기서 V 는 위성의 관성 속도, Va 는 대기 의 관성 속도, p는 위성 위치에서의 대기 밀도 (1976 년 미국 표준 대기 밀도이나 Jac chia - walker 모델 등을 사용하여 구함), Adf 는 위 성의 유효 단면적을 나타내고, cD 는 차원이 없는 항력상수로 cD 츠 1~2 의 값을 갖는다. 또한, 태양의 복사압력은 태양의 전자기 복사가 에너지, 운동 량, 각운동량을 지니는 것으로 i=―휠仁)(폰 )2h 4-106 의 형태로 나타내어진다. 여기서 So 는 태양상수(1 037W/m2) 이 고, R 는 위성에서 태양을 보는 단위 벡터로 i=(::: :)(;)
의 값을 갖는다. 이때 ¢는 위성과 태양과의 사이각을 의미한다. 식 4-106 에서 Aef f는 위성의 유효 면적, msa t은 위성의 질량, r 9 는 위성과 태양의 거리이며, 지구에 가까운 저궤도의 경우 r 9 ~ 1( A.U.) 정도의 값을 갖는다. 이 경우 태양의 복사압력에 의 한 섭 동함수 Rsolar 는 Rsolar=- K lz· r =-Ka sin ¢{cos(A ―L 사 +e[½cos(A+M-L 씨 -f cos(A ― M ―口]} 4-107 로 주어지며, 여기에서 K= 요C( \ 1 Ar.9 U . )/ m4sa 도t 4 . 536 X 10-s (•N /• m2)• 1ms 따at 를 의미한다. 또한, ,1= @+11, LH 는 태양의 적경을 나타낸다. 식 4-107 의 섭동함수는 다시 단주기 섭동 Rso/ar.sP 과 장주기 섭 동 Rso/ar.lP 으로 나누어 지 며 , 이들은 각각 Rsolar.sp= —Ka sin
의 값을 갖게 된다. 여기서 LH 는 태양의 경도로서 춘분점과 태 양 사이의 각이고, M 은 평균근점각이므로 11=w+M 가 된다. 4.2.4 지구 중력장에 의한 섭동 우리는 앞에서 인공위성의 운동에 영향을 주는 여러 가지 섭동 함수들에 대해 알아보았다. 이들 섭동 함수들 중에서 실제로 인 공위성에 가장 큰 영향을 미치는 것은 지구가 완전한 원이 아닌 편구이기 때문에 발생하는 섭동력이며, 이 절에서는 이처럼 지구 가 비대칭이기 때문에 생기는 지구 바대칭 중력장에 의한 섭동을 정의하고 이를 각 궤도 요소에 따라 영년 섭동 함수, 장주기 섭 동 함수, 단주기 섭동 함수로 나누어 보다 자세히 나타내어 보도 록 하겠다. 또한, 앞 절들에서 설명한 것과 같이 이심률 e 가 아 주 적어서 거의 원 궤도를 이루는 경우 특이점이 발생하게 되는 데, 이를 제거하기 위해 사용된 궤도 요소에 따라 두 가지의 경 우로 나누어 특이점을 제거한 섭동 방정식을 구할 것이다. 그리 고 이렇게 구한 섭동량을 고려한 실제 궤도 요소를 구하고, 이로 부터 평균궤도 요소를 구하는 방법도 알아보기로 하자. 지구가 완전한 점 질량이 아니며, 그 모양이 비대칭이기 때문 에 생기는 지구 비대칭 중력 퍼텐셜의 섭동은 4.2 . 3.1 에서 본 바 와 같이 크게 두 부분으로 나눌 수 있다. 죽 위도에 의해서만 변 화해 가는 zonal harmon ic s 와 경 도와 위도에 따라 섭동력 이 변 화하는 non-zonal harmon i cs 가 그것 이 다. 한편 지구 비대칭 중력 퍼텐셜 함수를 푸리에 급수로 전개시킬 때 지구 중력장 계수 Cl,m 과 Sl,m 이 나타나는데, 이 계수의 결정 은 인공위성의 운동 특성을 관측함으로써 가능하다. 궤도 요소의 변화율을 시간에 따른 궤도 요소의 1 차 미분 형태로 나타낸 섭동
방정식은 통신위성과 같은 정지 위성의 경우, 궤도의 이심률 e 와 궤도 경사각 i가 0 에 가깝기 때문에 궤도의 이심률 e 와 궤도 경사각 i는 물론이고 근지점 인수 (L}와 평균근점각 M 및 승교점 경도 요에 특이점이 발생하게 된다. 이러한 특이점을 제거하기 위해서 일반적인 궤도 요소 e, (L}, i, 요, M 대신에 ec=e cos w, es=e sin w, L=M+ w, l=M+ (L}( w= (L}+요)의 형태로 치환한 새로운 1 차 미분 방정식을 사용한다. 앞 절에서 설명한 것처럼 일반적으로 지구에 의한 중력 퍼텐셜 함수는 u=u。 +R 4-109 로서 주어진다. 그러므로 식 4-99 로부터 U=~[1+ 방 ]2 혼 (½-s i n 냐)-J 3 부(응 s i n 냐국) sin o 틀] 4 황(젊냐 s i n2 o--¼-sin 2 2o)+… ] 가 되고, 여기서 Uo= G? 민 sin o=sin i s i n(11+ (JJ)이므로 섭동 함수 R 은 R=U— G mr e 4-110 =Gm a,{출 h 홉 H 운)評― ½s i n2 i+강 s i n2 i cos 2(v+w)] -]3 왕(운 )4[( f s i n2 i공 )s i n(v+w) 읍 sin 2 i sin 3 ( v + w) ] sin i
틀] 4 활信 )5[ 갑―-f s i n2 i+fsin 4 i +sin 2 i.(今건 s i n2 z-) cos 2 (1.1+(JJ) +\sin4 i cos 4 (1.1+ (JJ) ]} 의 형태로 나타낼 수 있다. 이 식에서 (:)와 전근접각 /)가 이 심률 e 와 평균근접각 M 의 함수이므로 섭동 함수 R 은 M 과 근 지점 인수 (J)의 주기 함수가 된다. 일반적으로 궤도 방정식 r= 1a+(e1 -c o강s) / ) 에서 으r=- 1+ le- eco2s /) 로 주어지고, 케플러 제 2 법칙에 의해 옮= · 곱투 의 관계가 성립하므로 이 두 식을 이용하면 冒 i2)2 ::;dM 꿀『信 )3dM= (1 구) -3l2 。 (운 )3s i n 2v = 信 )3cos 2v =O ITT= e (l 군) -5/2 (운 )4s i n v = (운 )4cos 3 v = (1)4s in 3 r = O
ID= (1-e2)- 7/2 (1+ 長) (운 )5 cos 21.1 =}강 (1 군 )-7/2 (인 5sm 2v = 信 )5cos 41.1 = 信)\i n 41.1 =O 의 식들을 구해낼 수 있다. 이렇게 구해전 식들을 식 4-110 에 대 입하여 정리하면 섭동 함수 R 을 다음과 같은 형태로 얻을 수 있 다. R1 = Gm 국] 2 홉 H} ―½ sin 2 i) (1 —강 ) -3/2 R2=GmE B [―뿐J4 합(훑一f s i n2 i +fsin 4 i)(1군 )-7/2(1+ 長)+…] R3=Gm EB [-½h 信 s i n i(fsin 2 i -1)e(1 군 )-512s i n (J) -뿐J4 부 s i n2 i.(끓곱 s i n2 i.)강(1구 )-112 cos 2(J )+…] R4 = Gm 거f1 2l합 (은『{(}랍 sin t.)[ 1 —信 )3 (1 구 )-3/2] +½ sin 2 i cos 2 (v+ (J}) } 4-111 이 경우 위 식들에서와 같이 M 과 (1)에 모두 무관한 항들을 영년 섭동이라고 정의하고 이룰 R1, R2 로서 나타내는데, 보통 R1 를 1 차 영년 섭동, R2 를 2 차 영년 섭동이라 한다. 반면에 M 에 무관 하고 (1)에 의존하는 항들은 장주기 섭동 R3 으로 나타내고, M 에
의존하는 항들은 단주기 섭동 R4 로 나타내며, 이들 사이에는 R4 =R-R1-R2-R3 의 관계가 성립한다. 궤도 이심률 e 가 아주 적은 경우(거의 원 궤도)에 발생하는 특 이접을 제거하기 위해서 보통 위성 궤도 요소에 관한 섭동 방정 식의 이심률 e, 근지점 인수 (J}, 평균근점각 M 에 해당하는 방정 식 대신 &=ecos w, es=esin w, L=M+w(w= (J}+요), 위 도 인수 l=M+ (J}의 형태로 치환된 방정식이 사용된다. 여기에 서는 궤도 장반경 a, 궤도 경사각 i, 승교점 경도 요에 관한 방 정식을 그대로 사용하고, 궤도 이심률의 2 차항 이상은 무시하였 다. 이 경우 각 궤도 요소들의 시간에 대한 변화는 ddat n2a aaRt ddets =-__ nla 2 —aaeR c __n_eac2_ lc..,o.V t~L •1 .— a aRi — 2 nesa 2 —aaRt 뿜=-士뿔-옵 -co t 뿔方臣뿔 뿜= ¼,cot i (ec 뿔― es 笠+普) 4-112 寄d요 =言l cscz. 경aR fdl =n+, ~l( e/ s 詞aR +,e c faR} \ ;2) -aR下 c言ot 二i a言R 의 형태로 나타난다 (Danb y 1989). 여기서, n 은 평균 궤도 운동 각속도로 n2a3=GmEB 의 관계를 가지며, 모든 궤도 요소들은 평 균 궤도 요소가 된다. R 은 섭동을 일으키는 섭동 함수를 의미한 다. 지구 중력 퍼텐셜의 zonal harmonic s ]2, la 섭동 함수는 영년 섭동 함수 Rs, 장주기 섭동 함수 Rip , 단주기 섭동 함수 Rs p로
이루어진다. 이들은 각각 Rs= fµJ 2 합(}_小 sm2 t) (1 군 )-3/2 R1 p=-fµJ3 信 s i n i(f s i n 도 1)e(1 군 )-512s i n (JJ 4-113 Rsp= fµJ2 완(:)\(\―½ sin 2 i)[ 1 長 )3 (1 —강) -3/2] +½ sin 2 i cos 2 (다 (JJ) } 로 표시되며, 여기서 µ=GmE B, R EB 는 지구 적도 반경, r 은 위 성의 궤도 반경, II 는 전근점각을 나타낸다. 이러한 특이점의 제거는 사용되는 궤도 요소의 형태에 따라 크 게 두 가지 경우로 나누어지며, 이들의 각각에 대해서 다음 두 절에서 자세히 알아보도록 하겠다. 4.2.4.l e~I 이고 춘분점을 기준으로 할 경우 이 철에서는 자세하게 논의하기 위해 es=esin w, ec=e cos w, L=M+w(w+ (JJ델)의 궤도 요소를 이용하여 특이점을 제 거하고, 각 궤도 요소별 섭동량을 구해보도록 하자. 단주기 섭동은 위성이 지구를 한 바퀴 돌 때 평균근점각 M 이 변함에 따라 일어나는 섭동이므로, 궤도 요소별 단주기 섭동량은 단주기 섭동 함수 Rs p를 식 4-112 에 대입하여 적분해야 한다. 그러므로 RsP 의 u 와 r 을 평균근점각 M 과 이심률 e 로 바꿔 주 어야만 하는데, 그러기 위해서는 먼저 식 4-111 의 단주기 섭동 함수 m 에서 (운)가 포함되어 있는 항들을 평균근점각 M 의 함수 로 나타내어야 한다.
信 )3=1+3e cos M+ :궁내 e2cos 2M+… (운 )3 ― (1 군 )-312=1+3e cos M+ 붉 =3+e— 29c o강s cMos+ 2fM +e·2· c· o ―s 21 M― —32 강 (은 )3 cos 211=cos 2M 一 ½e cos M+f e co s 3M-f e2 c os 2M +-17y 궁 cos 4M+··· (폰 )3 sin 211=sin 2M 간 e sin M+f e si n 3M 군 e2 sin 2M 홉궁 s i n4M+··· 또한, w=w+ 요이므로 cos 2w=cos (2w-2 요) =cos 2w cos 2Q +sin 2w sin 2 요 sin 2w=sin (2w ― 2 요) =sin 2w cos 2Q — cos 2w sin 2 요 로 정리되고, 위 식들을 섭동 함수에 대입하여 이심률 e 의 1 차 항만을 취하여 R p 1 이라 하면, R p 1= 뇽합] 2{(1 당 s i n2 i)e cos M +숭 s i n2 i cos 2 Q[송 cos(2M+2w) +½cos (2M-2w) 거 -cos (M+2w) _운 cos(M ― 2@) +fe co s(3M+2w) +fe co s(3M-2w)]
—½sin2 i cos 2Q [½ cos (2M-2ii i) -½ cos (2M+2 iii) -f cos(M ― 2 節 +fcos (M+2ii i) 나 e cos (3M -2 iii) -fe cos (3M +2 iii) ]} 4-114 의 형태로 나타난다. 여기서 es=e sin ii5, ec=e cos ii5, L=M+ ii5 (ii5=(J}+요) 01 므로, e cos M= e cos (M 훌) = e cos ii5 cos L+ e sin ii5 sin L =ec cos L+es sin L e cos(M+2ii J) =e cos (L+ iiJ) = e cos ii5 cos L+ e sin ii5 sin L =ec cos L-es sin L e sin ( M+2ii J) =e sin (L+ iiJ) =esin ii5 cosL+ecos ii5 sin L = es cos L + ec sin L e sin ( 3M+2ii J) =e sin (3L-iiJ ) == eec csoisn i3i5L s—i n e 3s L co-s e3 sLin ii5 cos 3L e cos(3M+2ii J) =e cos(3L 一 iiJ) = e cos ii5 cos 3L + e sin ii5 sin 3L = eccos 3L + es sin 3L 으로 나타낼 수 있고, 따라서
R p 1=½µ 합] 2{(1 군 s i n2 z)(ec cos L+es s in L) +½ sin 2 i cos 2Q [cos (2L) —½ COS (ec cos L— e s sin L) 국 (ec cos 3L+ es sin 3L) ] 댜 s i n2 i sin 2Q [sin ( 2L) 간 (es cos L+e c sin L) 국 (ec sin 3L+ es cos3L) ]} 4-115 의 형태가 된다. 이 경우 섭동량은 식 4-115 를 식 4 - 114 에 대입하여 적분하면 얻을 수 있다. 그러나 ]2~10-3 이고 원 궤도에 가까운 (e <{ l) 경 우, ec 와 es 를 포함한 항들은 매우 작아 무시할 수 있다. 그러므 로 각 궤도 요소의 단주기 섭동량은 결국 (Lles)s p =½]2 합 [(1 ―f sin 2 z)sin L— - ¼-sin 2 i s i n(L ― 2 요) +꼽 sin 2 i sin (3L —2 요) ] (L1ec) sp = 골~ ~[(1 룹 sin 2 i) cos L +-¼ sin 2 i cos (L —2 요) +꿉 sin 2 i cos (3L-2 요) ] (Lla)sP 국 晶~ s i n2 ic os (2L-2 요) 켈 (km) (~麟 ) cos (2L-2 요) (Lli) SP =춥 ]2 왕 sin 2 i cos (2L 一 2 요) 4-116
(4 요 ) s p = ¾]2 信 cos is in (2L ― 2 요) (4L) s p = 방] 2 信 (-¾—-1 +CO ~S l) sin ' i sin (2L ― 2 요) 의 형태로 주어진다. 여기서, e= & 흥i=er, w = t an - 다e츠c 이다. 반면 에 장주기 섭 동 함수는 zonal harmonic s ]a로만 구성 되 어 있는데, 단주기 섭동의 경우에서와 같은 방법으로 구해보면 a, i, ec, 요, l 은 장주기 섭 동량이 없고, es 에 대 한 장주기 섭동량 만이 존재한다. 영년 섭동 함수 RI p는 위성의 궤도 요소를 시간 에 따라 거의 일정한 비율로 변하게 하며, a, e, i는 영년 섭동 을 받지 않는다. 영년 섭동은 h 에 의한 영년 섭동과 k 와 h 의 제곱항에 의한 2 차 영년 섭동의 두 가지가 있는데 대개의 경우 h 의 1 차 영년 섭동만을 취급한다. 일반적으로 장주기 섭동은 e 의 2 차항 이상을 무시하고 영년 섭동은 h 의 1 차 영년 섭동만을 취급하는데, 이것을 R s ,IP 로 나타내면 Rs,1p =½µ합] 2(½-½ sin 2 i) (1 구 )-3/2 내µ왕] 3 sin i (4 —5 sin 2 i) e (1 군) -512 sin (J} 의 형태가 된다. 여기서 e;= esin w, ec=ecos w 의 관계식을 이용하면 이 식은 e sin (J} = e sin ( iiJ -.Q) = e sin iiJ cos .Q-e cos iiJ sin .Q = es cos 요 _ ec sin .Q 로 바꾸어지므로, 결국
Rs,IP= 흥운] 2(} 검 sin 2 i)[ 1 +½
의 형태가 되고 , 따라서 장주기 섭동과 영년 섭동에 의한 섭동량 은각각 (Lles ) s ,1p = e sin (J)= eo sin ((J)o + ciJt) ―요2a ~ 4J-2- si n i (Llec ) S, {p = e cos (J)= eo cos ((J)o + 0t ) 4-120 로 나타난다. 이 경우 영년 섭동량은 0 =훙J2 합 - n(2 ―훙 sin 2 i) 이고, eo 는 기준점에서의 궤도 이심률을 의미한다. 4.2.4.2 e ~ I 이고 승교점을 기준으로 할 경우 이러한 경우에 있어서 ec= e cos(J J, es= esin ( JJ, l = M+ (JJ의 관계식을 이용하여 특이점을 제거하며, 나머지 사항은 4.2.4.1 절 의 과정과 같다. 단주기 섭동의 경우, Rp 1 = fµ합[(十―½ sin 2 i)3 e cos M +강 s i n2 i cos 2(L) ( cos 2M- 강 e cos M+f e co s 3M) 건 s i n2 i sin 2(L) ( sin 2M- 송 e sin M+f e si n 3M)] 국µ완] 2{(½-½ sin 2 i-) 3e cos M +½ sin 2 {cos (2(L ) + 2M) 랍 e cos (2 (L) + M) +fe co s (2 (L) + 3M) ] } 4-121
이 되고, ec=e cos (J), es=e sin (J), l=M+ (J)이므로 ecosM=ecos(l -(J))= eccos l+essin l cos (2(J )+2 M) =cos (2/ —2 (J )+2 (J )) =cos 2l e cos (2(J ) + M) = e cos (2(J ) + l _ (J)) = e cos (/ + (J)) = e cos (J) cos l-e s in (J) sin l e cos(2(J )+3 M)= = eec ccooss (l 3—/—e s 3s(iJ n) + l2 (J )) =e cos(3/-(J) ) =e cos (J) cos 3/+e sin (J) sin 3/ =ec cos 3/+ es sin 3/ 의 형태로 나타난다. 그러므로, e 의 2 차항 이상을 무시하여 Rp 1 으로 나타내면 다음과 같이 표시할 수 있다. Rp 1 = 방µ합] 2{(1 군 sin 2 i) (e c cos l + es sin l) +½1 sin 2 i[c os 2l-½l ( ec cos l + es sin !) 국 (ec cos 3l+es sin 3 기} 4-122 또한, 각 궤도 요소별 단주기 섭동량을 구해 보면, (L1es) s p =½]2 상 [(1 군 sin 2 i) sin l +sin 2 i(- -¼sin l+ 占 s i n 3l)] (L1ec) s p=훙J2 합 -[(1 군 sin 2 i) cos l +sin 2 i( -¼ cos l +꿉 cos 3l)]
(Lla) sP =방 ]2 ..Jar :- sin 2 i cos 2 / (Lli) SP =곱2 꽝 sin 2 i cos 2/ 4-123 맥) sp =}]2 부 cos i sin 2/ (4l)s p=―\f2 합 (7cos2 i— 1) sin 2 / (Llr) s p=罰墓a _ s i n2 i cos 2/ 의 형태가 되고, k 에 의 한 장주기 섭 동 함수를 Rs3 으로 나타내 면 Rs3 국 µ]3 꽝 -s i n i(4 — 5 sin 2 i) e (l 군 )-5 12 sin {J) 4-124 로 나타난다. 그러므로 임의의 시각 t에서 섭동량을 고려한 각 궤도 요소들은 e=eo— k 2R]2Pe sm· z· sm· w i=io+ 霜 e cos is in (J) M=Mo+ nt+ 2f]fz ea e 瓦=-7 s i n i cos (J) 4-125 (J) = (J)o + dJ t -~2-]2-P: -e- s=in h i (sin 2 i-e2 c os2 i) cos (J) g=SJo+Qt— ~e cot i cos (J) 의 식으로 표시할 수 있다. 여기서, 영 년 섭 동량 (Kozai 1959) 은
n=no+ 끔합 -T 學국-총 s i n2 t.) 0 =응 성幻 n(2 홉 sin 2 t.) 4-126 Q= ―討옹 R (B 2 n cos i 룰 의미하며, no 는 섭동이 없는 경우의 평균 궤도 운동 각속도 이고, 針토 수직 단반경이고, t는 임의의 시각을 나타낸다. 이러한 영년 섭동량 때문에 기준점에 따라 위성의 공전 주기는 다르게 표시된다. 케플러의 제 3 법칙에 따라 섭동이 없는 경우의 주기는 쩌하 =Gm EB 의 관계로부터 P=2 김 no 의 형 태로 나타나고, 여 기서 aB 는 Brouwer (19 59) 의 평 균 장반 경이고, 위성이 근지점에서 다음 근지접까지 돌아오는 데에 걸리 는 근점주기(下)는 祀 a}= GmEB[1 당] 2 今\g구 (1- 방 sin 2 i) ] 에서 P=2 깁万 가 된다. 여기서 乙 K 는 Koza i (1959) 의 평균 장반경이다. 또한, 위성이 승교점을 통과한 후 다음 승교점을 통과할 때까지 걸리는 시간인 교접 주기 (P사 는
PN= n2+7wf 으로 표시한다. 전형적인 태양 동주기 위성인 기상 위성 NOAA 는 파 =7192.14km, i =98.7° 의 궤도 요소를 가지고 지구 주위 를 돌고 있다. 이 위성의 근지접 인수의 변화율은 dJ= -2.89°/ da y이므로, 매일 근지점 인수가 2.89° 씩 감소하고, 승교점 경도 의 변화율은 .Q =O.989°/da y이므로 위성 궤도면이 ]2 의 섭동 때 문에 세차 운동을 하여 매일 승교점 경도가 0.989° 씩 증가하고, 공전 주기 는 ?= 101. 2289 분, PN = lOl. 2862 분이 된다• 지금까지 살펴본 것들 의에 e~l 인 경우의 e 의 2 차항을 취한 단주기 섭동 함수를 R p 2 라 하고, 1 차와 2 차 영년 섭동 함수를 각각 Rs1, Rs2 라 할 때, 단지 그 섭동 함수만을 기술해 보면 다 음과같다. R p 2= 拉완 (1- 방 s i n2 i-)[출 (e~+e~) +옹 (e 흥 -eD cos 2/+9eces sin 2/] 나µJ2 信 s i n2 曰 (e 흥 +e 詞 )cos 2l 꼴 (e~- e 홍) cos 4/ + 17eces sin 4/] Rs1 = 전 EJ 가1- 강 )-3/2(½ 국 sin 2 i) 4-127 Rs2=3µ 品]g (1 군 )-712[5(8-16 sin 2 i+ 7 sin 4 i) +4 /i二군 (2-3 sin 2 i)드 (1_ 강) (8— 8 s in 2 i一 5 sin 4 i)] 인공위성 추적을 통해 얻는 최종 자료는 기준점의 시각 t o 에서
위성의 위치 벡터와 속도 벡터이다. 이로부터 6 개 궤도 요소 a, e, (1), i, 요, M을 결정할 수 있는데, 이러한 궤도 요소롤 접촉 궤도 요소라고 한다. 접촉 궤도란 임의의 시점에서 위성의 궤도 에 집하는 케플러 궤도를 말하며, 이 궤도 요소에는 지구의 중심 인력과 섭동력이 포함되어 있어 시간이나 위성의 운동에 따라 변 하게 된다. 그러나 위성에 영향을 준 모든 섭동력을 실제 궤도로부터 제거 하면 위성은 지구 중심의 인력에 의해서만 그 영향을 받아 항상 일정한 케플러 궤도를 갖게 되는데, 이 궤도를 평균 궤도라 하고 그 궤도 요소를 평균 궤도 요소라 한다. 이 평균 궤도 요소는 시 간에 따라 변하지 않고 항상 일정한 값을 가지므로, 섭동력에 의 한 변화량을 더해 주면 실제 궤도를 얻을 수 있다. 하지만 일반적으로 평균 궤도 요소를 직접 구할 수는 없고, 관 측을 통해 얻어지는 접촉 궤도 요소를 이용할 수밖에 없다• 섭동 방정식과 섭동 함수에도 평균 궤도 요소가 포함되어 있기 때문에 New ton -Rap s on 방법을 통해 다음과 같이 평균 궤도 요소를 구 해낼 수 있다 (Ca i n 1962, Walte r 1967). aos= li+ (Lla) sP ( es) 。 s = e; + (Lles) sp + (Lles) LP ( ec) 。 s = ~ + (Llec) sp + (Llec) LP eos= ( (es) 盆 + (ec) 盆) 1/2 ios = Z+ (Lli) sP+ (Lli) LP 요 os= g+ (4 요 )s p+ (4Q ) lp + (4 요 )s 4-128 las = T+ (Lll) sp + (Lll) tp (1)o s=t an -1 ( 益:)+ (4(1 ))s
Mos = las —(L)。 s +( LJM ) s r= l + 老百 c(o1s- ( 합T)- w ) 여기서, Xos 는 시각 t에서의 접촉 궤도 요소, 굿은 t o 에서의 평 균 궤도 요소이다. 또한, (Llx)sP 는 단주기 섭동량, (Llx)1 p는 장 주기 섭동량, (Llx)s 는 영년 섭동량이며, t o 는 기준점의 시각, t 는 구하고자 하는 시각을 나타낸다. 4.2.5 달과 태양에 의한 섭동 이 절에서는 지구 주위를 운동하는 인공위성에 미치는 제 3 의 물체에 의한 섭동을 설명하기 위해, 가장 일반적인 태양과 달에 의한 섭동을 저궤도의 인공위성의 경우와 정지 궤도 인공위성의 경우로 나누어 각 경우의 태양과 달이 미치는 섭동을 구해 보도 록하자. 제 3 의 물체에 의한 섭동은 편구에 의한 섭동보다 그 형태가 더 욱 복잡한데, 이는 섭동을 미치는 물체가 시간에 의존하기 때문 이다. 이 경우 일반적으로 퍼텐셜의 형태는 U=G(~+-¥+¥) L12= r'2-2rr cos s+ r2 z1 = (r'2-2rr' co1s SJ5+ 군) 1l2 = r'[1-2 곰 cos1 范 + (?)2] 송
=불 1 +흠(터j Pj (cos 515) ] 로 주어지며, 여기서 msat, ma ,, m' 은 각각 위성, 지구, 달의 질량이고, r, r’ 은 지구와 위성, 지구와 달 사이의 거리를 나타 낸다. 또한, 4 는 위성과 달 사이의 거리이고, sJ5는 r 과 ? r ' 이 이루는 각으로 cossl5=~' 의 값을 갖는다. 그러므로, 퍼텐셜은 결국 U=G{~+~+¥[1+(7 )2 A(cos 范) +(7)3A (cos 范) ···]} =G{~ +판 (mm+msa t )+¥[(7rA(cos 范) + (?r[)3 (cos 范) …] } 4-129 의 형태가 되고, 운동 방정식으로부터 d2x l au dt 2= 굶二경 =G 훑-[ mr\ +」:뿡+판 (?)2P2(cos 范) +딧 ?)3R(cos 范)+…] 의 식을 얻어낼 수 있다. 여기서 우변의 두번째 항은 x 를 포함 하지 않으므로 x 에 대해 편미분하면 0 이 된다. 위 식에서 우변 의 제 1 항은 섭동이 미치지 않을 때이고, 제 3 항과 제 4 항은 조석력 의 항 또는 달의 섭동항이다. 제 3 항과 제 1 항의 비는
판 (?)2卓P2 (c os 范) 玉(二 )(?)3 r =(¼)(7) I (f-r ) I 3 이 되며, 여기서 a ’ 은 달의 궤도 장반경, nm 은 달의 평균 운동 울 나타낸다. 그러므로, 달에 의한 섭동 함수를 전개해 보면 Rm = n;r2~ (충)3[ A (cos 范) +-f,;A (cos 蜀 + …] 4_130 의 형태가 된다. 이 경우 제 1 항과 제 2 항의 비는 매우 작기 때 문에 -rfm,P;2 A(c (ocso 蜀s 范)) 2 —6l0 로 근사하여 나타낼 수 있다. 만약 제 2 항 이하를 무시하는 경우 섭동함수는 Rm = n;r2~ 는 )2[A (cos SD) ] • ·- 4-131 로 주어지며, 케플러 제 3 법칙에서 위성에 대하여 n2a2=Gmo, 달에 대해서는 n 젊 a~=G(me+mm) 의 관계가 성립하므로, 이 두 식을 식 4-131 에 대입하면, 달에 의한 섭동 인수는
m; :m 'nm (문 )2(r: \) 3 4-132 이 된다. 또한, 태양에 의한 섭동의 경우에도 달의 경우와 마찬가지로 n ~ a ~ =Gm 0 를 대입하면, 태양에 의한 섭동 함수는 R0 = n ~ 군( 틀 )3[A (cos SD) ] 4-133 의 형태로 나타낼 수 있다. 여기서 태양에 의한 섭동 함수의 제 1 항과 제 2 항의 비는 다음과 같이 주어진다. rro =_ PA2( (ccooss 范范)) 2 4010 마찬가지로 태양에 의한 섭동 인수는 른 )2( i )3 4-1 3 4 이 된다. 죽, 달과 태양의 경우를 비교해 보면 달의 섭동 크기는 二노군 )2 4-1 3 5 태양의 섭동 크기는 톤 )2 4-136 의 형태로 나타난다. 예를 들어, 저궤도 인공위성의 경우에 평균 운동은 n=5000°/ day 정도이므로 달에 의한 섭동은
m ®門 m mm (『 )2 = 82 .1302 (War = 0 . 9 x 10-7 이 되고, 태양에 의한 섭동은 (퉁『=( °·0 006)2=O . 4 X 10 구 의 값을 갖는다. 이 경우에 있어서 ]2 항의 섭동은 J 2부 a =10-3 으로 나타난다. 저궤도 인공위성의 경우 달과 태양에 의한 섭동 력은 lo-7 단위 정도이므로 J2 항에 비해서 무시할 수 있을 정도로 작다. 반면에 정지궤도 위성의 경우에는 저궤도 위성과는 달리 원 궤 도로 운동하고, a=6.6l R9 , n=360X l. 002738(0/da y)의 값을 가지므로, J2 항의 섭동은 J2 의a~ 드6무.61 =2 . 477 x 10-s 이 되며, J3 항의 섭동은 J3 요 a3 노 6l0.- 661 -+ 무시 가능 으로 상대적으로 작은 값을 가져 무시할 수 있다. 이 경우 달에 의한섭동은 mEmB+mm m (\ n느 )I 2= 82.13 02(\ 360X1l3..02 0 2738 『 =l.625X10-s
의 값을 갖고, 태양에 의한 섭동은 (톤 )2=(~ 『 =0.745 X 10-5 으로 주어진다. 위에서 보면, J2 항과 달에 의한 섭동, 태양에 의 한 섭동이 같은 차수로 나타나므로, 정지궤도 위성의 경우는 이 롤 무시할 수 없다. 이제 지금까지 살펴본 내용들을 바탕으로 이심률과 궤도 경사 각이 아주 작은 정지궤도에 떠있는 위성에 작용하는 달과 태양의 섭동에 대해서 생각하여 보자. 먼저 위성이 적경 a, 적위 &인 위치에 있다고 가정하고, 이때 섭동을 주는 물체의 위치는 적경 a', 적위 o', 궤도 경사각은 i', 위도 인수는 L', 승교점 경도는 요' 이라고 생각하자. 이 경우 위성과 섭동을 주는 물체와의 방향 여현은 구면삼각형 의 cos 과 s i n 의 법칙을 사용하면 다음과 같이 나타낼 수 있다. cos 范 =s i n 8 sin 8'+cos 8 cos 8' cos (a— a') =sin i' sin L' sin 8+cos L' cos 8 cos (a- 요') +cos i' sin L' cos 8 sin (a ―요') 4-137 ::::::o sin i's in L'+cos2—i 2' co s (a- 요'― L') +s i n2 느2 cos (a-Q ' +L') 또한, 식 4-130 에 서 P2 (cos sJ5) 만 사용한 섭 동 함수는 R=n2r2 리me 우r )\1+3::s 2i' 나 cos 망 cos 2(a- 요 ' - L') +~43 si•n 4d -:i2:'- -cos 2 (a- 요 '+L')
+—38 sin 2 i'[c os 2(a- 요') +cos 2L'] 며 8 sin i'[c os i' s i n(a- 요') -cos 宁i n(a- 요 '-2L') +s i n 宁i n (a- 요 '+2L') ]} 4-138 의 형태로 나타내어지고, 따라서 W=+(lfl -t=O = n-2c ro 그sm2 Ef (B 2 \ s터ri'n I ( 겔2a s:in' —i'[2 c L o's) +i' ssiinn 2 (f a2 -s요in' ) ( a ―요 '+2L'] 4-139 ., ., 의 값을 갖게 된다. 여기서, 섭동을 주는 물체와 정지위성의 궤 도가 원 궤도라고 가정하면 r'=a', r=a, a=A=w+Q +v, e=O 의 관계가 성립한다. 이제 Wc=s i n i cos 요와 Ws=s i n · i s i n 요의 섭동량을 구해 보 도록 하자. 이 경우 달과 태양에 의해 작용하는 섭동의 변화량은 墨 =cosAw dt na =n(7) 3~fsin i' {cos i' [s i n(2 /l.-요') -sin 요'] -cos2 느2 [s i n (2 /l.―요 '-2L') -s i n(2L'+ 요') ] 4-1 4 0
+sin 2 f2 [sin (2.A ―요 '+2L') +sin (2L'_ 요') ]} dWs=sin Aw dt na = n( 티a' I 3 mmE' B 요4 sin i'{ cos i'[ —c os (2.A _ 요') + cos 요'] —c os2 身2 —c os (2A 갑 2' —2 L') + cos (2L' + 요') ] +sin 2 身2 -cos (2. A-Q' + 2L') + cos (2L' _ 요') ]} 4-141 의 형태로 나타낸다. 식 4-140 과 식 4-141 에서 요'항만 포함한 두번째 항은 영년 변화를 나타내고, A 항을 포함하고 있는 첫번 째, 세번째, 다섯번째 항들은 각각 단주기 섭동항들을 의미한다. 또한, L' 과 요'만을 포함하고 있는 네번째, 여섯번째 항들은 각 각 장주기 섭동항들을 나타낸다. 단주기 섭동항 중에서 제일 큰 항의 진폭은 (a리' I 3 mmEB' 요8 s i n 23.44°=1 .4 0XlQ- 4 deg for moon =O . 64 x 10-4 deg for sun 이므로 현재의 위성 추적 기술로는 달과 태양의 단주기 섭동항들 은 무시할 수 있다. 반면에 장주기 섭동항 중에서 제일 큰 항의 진폭은 디n'\우 a' I) 3브 m-e 으8 s i n i'= O.0038° for moon =O.0232° for sun 와 같이 비교적 큰 값을 가지므로 무시할 수 없으며, 특히 태양
의 경우는 매우 큰 값을 갖고 있는데 이때 주기는 6 개월이 된다. 이들 여러 가지 섭동항 중에서 가장 홍미 있는 섭동은 영년 변 화이다. 죽, 영년 섭동은 달과 태양의 경우에 각각 [(망 )2 + (망 )2] }= n 信 )3~ f sin 2i' = l. 61 X l0-3 0/day for moon =O . 735 x 10- 3 0/day for sun 의 값을 가지므로, 이둘의 영년 섭동량을 합치면 2.34Xl0-3 0/ da y =0.854°/ y r 와 같이 비교적 큰 값을 갖게 되어 정지위성의 경우 위치 보존을 위해 2~3 개월마다 남북 방향의 궤도 보정을 해주어야 한다. 또한, 궤도 평면에서 동경 방향에 수직인 섭동 가속도는 S'= 杜틀 )8 = 0 = n_2으r2 교 ms i(E n B 4\ 우 f2r '『 sI inL[ 2국(2a -c-o -요s-4 ' f+ 2L 's)i n - 2오 4(a s ― i n요2 'i'- sLi'n ) 2(a- 요')]4 -142 의 형태로 나타내며, 이 경우 달과 위성이 원 궤도로 돈다고 가 정하면 r'=a', r=a, a=/1 , e=O, V=na 와 같은 관계가 성립한다. 여기서 장반경에 대한 섭동량은 쁘d=t- -4n-2-a- S' V
=2―11요 二2 sin信 4 f2 ) s3ain[ ―2 (f/l 一co 요s' 宁 + iL') n - 2으(4 A s-in 요2 i''- sLi'n ) 2 (/l-요'4 )- 1] 43 이 되며, 이것을 적분하면 4a= 부me 리a' 3a[ 요2 n-~nc'o s4f2 cos 2(A— Q' -L') +23- n+ nn ', s--i.n- -• 4 i-2'c os 2(A 一요 '+L') 4-144 +요4 sin 2 i' cos 2 (A —요 ') ] 의 값을 얻어낼 수 있다. 위 식과 같은 달과 태양의 장반경 섭동 량은 보통 영년 변화와 장주기 변화는 전혀 없고, 오직 단주기 변화만이 나타나는데, 이와 같은 달의 섭동에 대한 장반경의 단 주기 변화량은 (Lla) m=O.986 km cos 2(A- 요 -Lm) +O.081 km cos 2 (A ―요) +0.0017 km cos 2(A- 요다 Lm) 4-145 이 되고, 반면에 태양의 섭동에 대한 장반경의 단주기 변화량은 (ila) 0=0.4 3 6 km cos 2(A-L0) +0.037 km cos 2(A) + 0 . 0008 km cos 2 (A + L0) 4-146 의 값을 가지므로(SJ 0=0), 위성은 정지궤도상에서 하루에 2 번씩 0.986km 와 0.436km 의 큰 진폭으로 장반경이 변화하게 된다. 동경 방향에 대한 섭동 가속도는 R= (풍 )a=o=2n% 二信)\ 1+3::s 2i'
+—34 cos 4 느2 cos 2(A ―요 '_L') +—34 s- -i.n - -4, — i 2' c os 2 (A ―요 '+L') 4-147 +으8 sin 2 i'[c os 2 (A —요') + cos 2L'] } 의 형태로 나타내며, 이 경우 달과 위성이 원 궤도로 돈다고 가 정하면 위성의 평균 적경 M= (J)+Q +M 에 대한 섭동량은 —ddLt = n•• - — n2a IR .' =no— — 23 —an 4--a-_ —n 2a IR .' =no-n 교mE( B \ 우a' I) 3L-[1 :2 s-- i- n-2 -i '-+2요 s i n2 i' cos 2L' +(3+f ~) cos 딸 cos 2(A-Q ' -L') +(3+ f*-)s i군f cos 2(A ―요 '+L') 국 sin 2 i' cos 2 (A ―요') ] 4-148 의 형태로 나타내고 괄호 속의 첫번째 항은 영년 변화를 나타내 고, 두번째 항은 장주기 섭동항이고, 나머지 3 개 항은 단주기 섭 동항들을 나타내고 있다. 영년 변화를 달과 태양에 대해 합하면 릅〉 =no[1- 二信 )3(1-}s i n2 i')] m+0 =no[l-1.25 X 10-5-0. 57 X 10 기
=O . 9999818no 4-149 가된다. 장주기 변화는 (LIL) IP = 그1디n$ 우\ a)' I 겔4 혹n sin 2 i' sin 2L' =-0.0030°sin 2Lm for moon 4-150 =-0.0185° sin 2L0 for sun 으로 태양의 섭동량이 달의 섭동량보다 6 배가 크다. 식 4-148 에 서 가장 큰 항을 달의 섭동으로 계산하면 뿔= — n( 二)信 )3+(~ 그 :'l) co 갛 f cos 2 (A —요 ' ― L') =-0.0 2 86°/day COS 2(A-Q m -Lm) · 4-151 가 되고 이 항을 접촉 경도 표류 속도라고 부른다. 이제 ec=e cos ((J)+요)와 es=e s i n( (J)+요)의 섭동항을 구해 보도록 하자. 쁘dt드 sinn a A ·,·R~ '+• 2 cnoas A S' =(二 )(?)3n{( 강 \s i n2 i') sin A __34 COS 나2 [s i n (3A -2 요'- 2L') + 3 sin (A -2 요' —2L ') ] -요4 sin 4 -2f. [si n (3A-2 요' + 2L') + 3 sin (A -2Q + 2L') ] ―요8 s i n2 i '[s i n(3A-2 요') +3sin (A-2 요')
-sin (/l +2L') -sin (/l-2 L') ]} 4-152 쁘dt 드 _ coms aA ·I·~R '+• 2 snina As = -(二)信 )3n{(} ―f sin 2 i') cos A + +34c os4 ~2[ 3 cos (A -2 요' -2L') -c os (3A —2 요' + 2L') ] + —43 sin 4 ~2[ 3 cos (A —2 요' + 2L') —c os (3A-2 요' + 2L') ] +—83 sin 2 i'[3 cos(A-2 요') 一 cos(3A-2 Q') +cos (A+2L') +cos (A-2L')]} 4-153 의 형태로 나타낸다. 식 4-152 와 식 4-153 을 적분하면 단주기 섭 동항만을 구해 낼 수 있다. 죽, (ec)SP= (二)(리{-(강국 s i n2 i')c os A +요4 cos4 f2〔 n-~2cno' s(A-2 요 '-2L') ++요34 n s-—·i~ ·n· 24 nf2 ' [ Lc o n¼s+ (23nA,'- 2co 요s '(-A2L-'2)Q ] ' +2L') +3n+~2n' c os (3A-2 요 '+2L') ] 국 s i n2 i'[3 cos(A-2 요') +½cos(3A-2 요')
-*nc+o2ns'( A+2L') —11 -~2cno' s(A-2L')]} 4-154 (es)sP= ―(二)信)\(½-f s i n2 i') sin A +요4 cos4 f2 [¼n— 2n, ' sin (A-2 요' —2L ') -3~n— 2ns ' in (3A ― 2 요 '_2L')] +요4 -s- i- n-4 f 2 L[ n+¼2ns' i n(A 갤 '+2L') _국 3n s+inn2 2 ni'' [s 3i ns i n( 3 (AA ―- 22 요 요' ')+ _2L½') s]i n (3A —2 요' ) +n+*2ns' in( A +2L') +n--±2n,' sin (A— 2L ')]} 4-155 이고, 단주기 섭동항 중에서 제 일 큰 항의 진폭은 ~m@J )a3' -4} cos4 f2 ¼n-2=n' 3 . 63 X 10-s for moon = 1. 55 x 10-s for sun 이 되며, 주기는 1 일이다. ec 와 es 의 영년 변화와 장주기 변화 등 자세한 섭동항에 대한 계산뿐만 아니라, 다른 궤도 요소에 대 한 달의 섭동항들도 100 여 개의 항들로 이루어졌기 때문에 다음 절에서 논의할 컴퓨터에 의한 수식 처리의 과정을 거쳐야만 보다 빠른 시간 내에 정확한 결과를 얻을 수 있다.
4.3 컴퓨터에 의한 수식 처리 인공위성이 궤도 운동을 하는 동안에 이 위성은 앞에서 살펴본 바와 같이 여러 가지 섭동 요인들에 의해서 힘을 받게 된다. 우 리는 지금까지 4 장의 앞 절들에서 이둘 섭동을 고려한 인공위성 의 두 가지 섭동 함수와 운동 방정식들을 구하고 이들을 실제 상 황에 응용해 보았다. 하지만 일반적으로 이들 섭동 함수들을 손 으로 직접 전개하는 데에는 엄청나게 많은 시간이 요구되며, 이 절에서는 이런 불편을 해소하기 위해 이들을 보다 빠른 시간에 전개시키는 방법으로 컴퓨터에 의한 수식 처리 방법에 대해 간단 히 소개하도록 하겠다. 4.3.1 기본 이론 레이저 기술의 비약적인 발전으로 이제 위성 추적 기술은 한총 더 전보하게 되었다. 이러한 추적 기술의 진보에 힘입어 위성의 궤도를 기술하는 이론적인 면에서도 역시 비약적인 진보가 이루 어졌다. 이렇게 더욱 발전된 이론과 기술로 인해 습득된 각종 자 료의 처리도 더욱 높은 정밀성을 요구하게 되었고, 또한 이러한 자료들로 위성의 운동을 표현하기 위해서는 수식의 연산 및 급수 전개가 필요하게 되었다. 그러나 이러한 수식의 전개와 연산울 일일이 사람의 손으로 행 한다면 시간도 많이 걸리고 오차도 많이 생길 것이다. 따라서, 주어진 수식을 허용 오차 내에서 전개하고 연산하는 컴퓨터 프로 그램의 필요성이 절실하게 요구되었다. 수식 전개와 연산을 프로그램화하려는 최초의 노력은 1958 년
Her g e t에 의해 시도되었다. 그러나 그 당시 사용되던 IBM-650 의 한계성 때문에 고속 컴퓨터가 등장한 60 년대까지는 그다지 큰 성과를 얻지 못했다. 1964 년 FORMAC 이 소개되었고, 이어서 MATHLAB (1966) , REDUCE (1967) , 그 리 고 I. A. M. (Inte r -acti ve Alge braic Manip u lati on , 1970) 등이 몇 년 뒤 에 연 이 어 소개 되었다. 이러한 프로그램들은 사용이 간편하고 컴퓨터에 대한 사 전 지식이 없이도 사용할 수 있었으나, 사용자들을 만족시킬 만 큼 정밀도가 높지 못했다. 특히 천체역학 분야에 종사하는 사람 들이 그런 문제점에 많이 부딪혔다. 간단해 보이는 계산에도 CPU 시간이 수 분씩이나 걸렸고 약간 큰 프로그램을 계산해 본 사람들은 거의 대부분 메모리 부족이라는 한계에 부딪혀 애를 태 우곤했다. 결국 이러한 특별한 요구 조건을 만족시키기 위해서 몇몇 연구 자들이 그들 자신의 분야에 알맞는 수식 처리 프로그램들을 자체 개발하기 시작했다. 예를 들어 De p r it는 달의 위치 계산을 위한 E. S. P. (Echeloned Serie s Processor, 1970) 라는 프로그램 을 소개 했고, J e ff e ry s(1970) 는 고전적 인 섭동 이론에 나타나는 푸아송 (Pois s on) 급수 전개를 위해 비슷한 프로그램을 만들었다. 그러 나 이 것 은 LISP (General Lis t Processin g Lang ua g e) 로 작성 된 것 이어서 LISP 1.5 컴파일러가 있어야 했으며, 그 당시에는 텍사 스 대학의 CDC-6600 을 제외하면 그 어느 CDC 컴퓨터에서도 LISP 가 실행되지 않았다. (대부분의 IBM 에서는 가능했다.) 게다 가 해군 연구소의 CDC-3800 컴퓨터로는 기억 용량의 한계 때문 에 프로그램을 원활하게 작동시킬 수가 없었다. 반면에 비전문 프로그래머를 위해서는 I. A. M. (Inte r acti ve Alge braic Manip u lati on ) 이 라는 프로그램 이 해 군 연구소에 서 사용 되었다. 이것은 범용 수식 처리 프로그램이었으나, 속도가 느리
고 비용이 많이 들었으며 결정적으로 삼각함수를 처리하는 기능 이 들어있지 않았다. 수작업으로 3 시간 가량 걸리는 계산울 PDP-10 컴퓨터에서 I. A. M. 을 사용하면 20 여 초가 걸렸다. 물 론 500 분의 l 에 불과한 시간이었지만 더 확장된 계산을 위해서는 보다 효율적 인 프로그램 이 필요했다. 효율적인 계산울 위해서는 소위 말하는 Delauna y의 독창적인 달운동 이론을 그 당시의 컴퓨터 상에서 몇 분 이내의 CPU 시 간으로 해결할 수 있어야 했다. 이러한 기준은 현실성이 없는 것 처럼 보였지만 적정한 CPU 시간 이내에 그러한 문제를 해결할 수 있어야 하는 것이 최소 요구 조건이었다. 그러면, 여기서 일반적으로 대부분의 컴퓨터에서 단일 연산에 걸리는 시간으로 정의되는, 컴퓨터의 계산 능력을 나타내는 지표 를 정해 보기로 하자. 인간 한 사람에게 20 년 이상의 계산울 요 구하는 문제가 무의미한 것처럼 컴퓨터가 몇 시간 이상을 계산한 다는 것은 사실 무의미한 것이다. 수식 연산 프로그래머들이 정 한 요구 조건은 Delauna y가 수작업으로 20 년 동안 계산한 것을 컴퓨터는 몇 분 이내에 할 수 있어야 한다는 것인데, 이것은 컴 퓨터가 인간보다 수십만 배 빨라야 함을 의미한다 (Delauna y가 이 문제에 대해 매일 하루에 서너 시간씩 매달렸다고 가정했을 때이다). 그러나 이 정도의 속도를 만족하는 프로그램은 현재에도 매우 드 문 것이 사실이다. 최근의 컴퓨터들은 보통 인간보다 계산 능력이 107 배 정도 빠 르다고 한다. 그러나 컴퓨터에 수식 연산 프로그램을 실행시키면 이 비율이 1000 분의 1 정도로 저하된다. 그래서 하드웨어가 향상 된 만큼 소프트웨어 면에서도 더 나은 것이 요구되게 된 것이다. 앞에서 기술한 여러 가지 이유 때문에 여러 방면에 응용될 수 있고 모든 욕구를 충족시킬 수 있는 범용 수식 처리 프로그램을
만든다는 것은 실현 가능할 것 같지가 않았다. 그래서 대다수 프 로그래머들은 프로그램을 특정 목적과 특정 컴퓨터에 제한시킴으 로써 프로그램의 효율을 높이는 방법에 주의를 집중하게 되었다. 여기에 소개되는 컴퓨터에 의한 수식 처리는 미해군 연구소에 서 개발된 것으로 해군 연구소의 CDC - 3800 에서 효율비를 100,000 : 1 까지 향상시키는 것이 그 목적이었다. 이 프로그램은 다른 컴퓨터와의 호환성과 사용자의 편의를 고려하여 FOR- TRAN 으로 작성되었으며, 천체역학에 등장하는 푸아송 급수와 같은 긴 수식도 처리할 수 있도록 고안되었다. 이 프로그램에서 는 긴 수식의 가감승제, 미적분 등과 같은 복잡한 연산도 가능하 다. 결국 이 프로그램의 개발로 천체역학 문제에서 더 높은 차수 의 해롤 구하는 것이 사실상 가능해졌다. 4. 3·, 2 컴퓨터 알고리즘 4.3.2. 1 내부 구조 이 절에서 소개하고자 하는 컴퓨터에 의한 수식 처리는 하나의 프로그램이라기보다는 기본적으로 수십 개의 서브루틴들의 모임 으로 구성되어 있는 프로그램군이다. 사용자는 이 서브루틴들을 조합하여 자신의 목적에 알맞는 주프로그램 (FORTRAN) 을 짜면 되는 것이다. 컴퓨터에 의한 수식 처리는 다음과 같은 형태로 이 루어진 푸아송 급수를 이용한다. ( (유:R?a,tti oin oa;l 수) ) (sePvoelryanl ov mair aila b olfe s ) (csoins ) (cAomugb uimn a e tni ot n i nov fo slveivn eg r a al Iainnge a ler s ) 고전적인 섭동 이론에서 나타나는 많은 문제들은 대다수가 이
러한 형태의 식으로 표현되며, 다음과 같은 몇 가지 중요한 특징 때문에 이러한 급수들은 수식 처리에서 중요한 역할을 하게 된 다. -두 개의 푸아송 급수의 합, 차, 곱은 역시 푸아송 급수가 된다. -하나의 푸아송 급수를 다른 식에 대입해도 역시 푸아송 급수가 된다. -기호 미적분을 해도 급수의 형태는 변하지 않는다. 기 계 내 부적 으로 푸아송 급수의 각 항은 6 개 의 48-bit word 에 대응되며, 이 word 들은 모든 부프로그램에서 공통으로 적용된 다. 죽, NEXT(k) Lis t 상에 서 다음 항의 address 를 지 정 한다. N(k) 정수분자 M(k) 정수분모 IEX (k) 여덟 개의 p acked 된 정수 지수를 포함하는 다 항식의 지수로 그 값은 ― 32~+31 이다. 여기서 Packed 됐다는 것은 몇 개의 작은 word 둘을 한 개의 큰 48-bit word 로 압축시켰다는 것을 의미한다. ITRIG(k) sin e , cosin e 함수를 표시 : ― 1 은 sin e 함수, + 1 은 cosin e 함수를 뜻한다. IRG(k) 삼각함수의 입력 변수는 그 범위가 —3 2~+31 이어야 하며 개수는 8 개로 한정된다. 위 의 각 항들 중 IEX (k) 와 IRG (k) 는 48-bit 8 진수 word
fo rm 으로 iijj kkllmmoop pqq 의 형태로 나타나며, 여기서 ii, jj 등은 0 에서 77 사이의 8 진수 정수를 의미한다. 8 진수 40 을 0 으로 간주하면 46 은 +6 이 되고 35 는 ― 5 가 된다. 그래 서 0 은 4040404040404040 (oct) 로 표시 된 다. 반면 에 CDC- 3800 에 서 는 하 드 웨 어 의 한 계 성 때 문 에 O- in dex 가 2040404040404040 (oct) 로 나타나고, 따라서 정 수항과 삼각함수의 계수는 -16~+15 의 범위로 제한된다. 앞에서 설명했듯이 컴퓨터에 의한 수식 처리는 프로그램이라기 보다는 서브루틴둘의 집합이다. 이 서브루틴둘을 얼마나 효율적 으로 사용하느냐에 이 프로그램의 성능이 좌우된다. 컴퓨터에 의 한 수식 처리는 크게 내부에서만 쓰이는 서브루틴들과 사용자가 불러다 쓰는 서브루틴으로 나눌 수 있으며, 이들 각각의 서브루 틴들도 그 내부에서 다른 서브루틴둘을 호출하여 연산에 사용한 다. 이 책에서는 이 수식 처리 프로그램에 등장하는 각각의 서브 루틴들에 대한 자세한 설명은 생략하였으며, 보다 자세한 내용을 필요로 하는 독자는 Dasenbrock (19 73, 1982) 을 참조하기 바란다. 4.3.2.2 메모리 운용 일반적으로 모든 수식 연산 프로그램의 성능은 기억 장소의 활 용에 달려있다고 해도 과언이 아니다. 이 절에서는 연산의 중간 과정이나 결과에 나타나는 기다란 수식 처리를 위해 그림 4-6 에 서 와 같은 기 본적 인 배 열 처 리 방법 (list pro cessin g tec hniq u es) 을 사용했다. 그립에서 한 개의 급수를 구성하는 일련의 요소둘을 〈리스트(li s t)〉라고 하며, 보통 한 개 이상의 원소를 가지고 있으
면 활성 화된 (acti ve ) 리 스트, 그렇 지 않으면 (null, 0) 비 활성 화 (ina cti ve ) 된 리 스트라고 한다. 이 프로그램 에 서 는 메모리 가 허용 하는 한 급수의 개수에는 제한이 없다. 다시 말해서, 메모리는 0 이 아닌 항에 대해서만 제공되며, 때로는 인접한 원소 또는 다른 리스트의 원소들과 얽혀 있을 수도 있다. 리스트 상에서의 첫번째 항의 address 는 head p o i n t er 인 MSTART(I) 에 기록되고 마지막 항은 MAX(I) 에 기억된다. 이 둘 각 리스트의 모든 원소들은 포인터에 의해서 연결되어 있으 며, 이러한 원소들의 연결 구조 (cha i n) 는 역방향으로는 호출되 지 않는다. 이들이 실제로 기억장치에 기록된 모양은 그림 4-7 과 갇다.
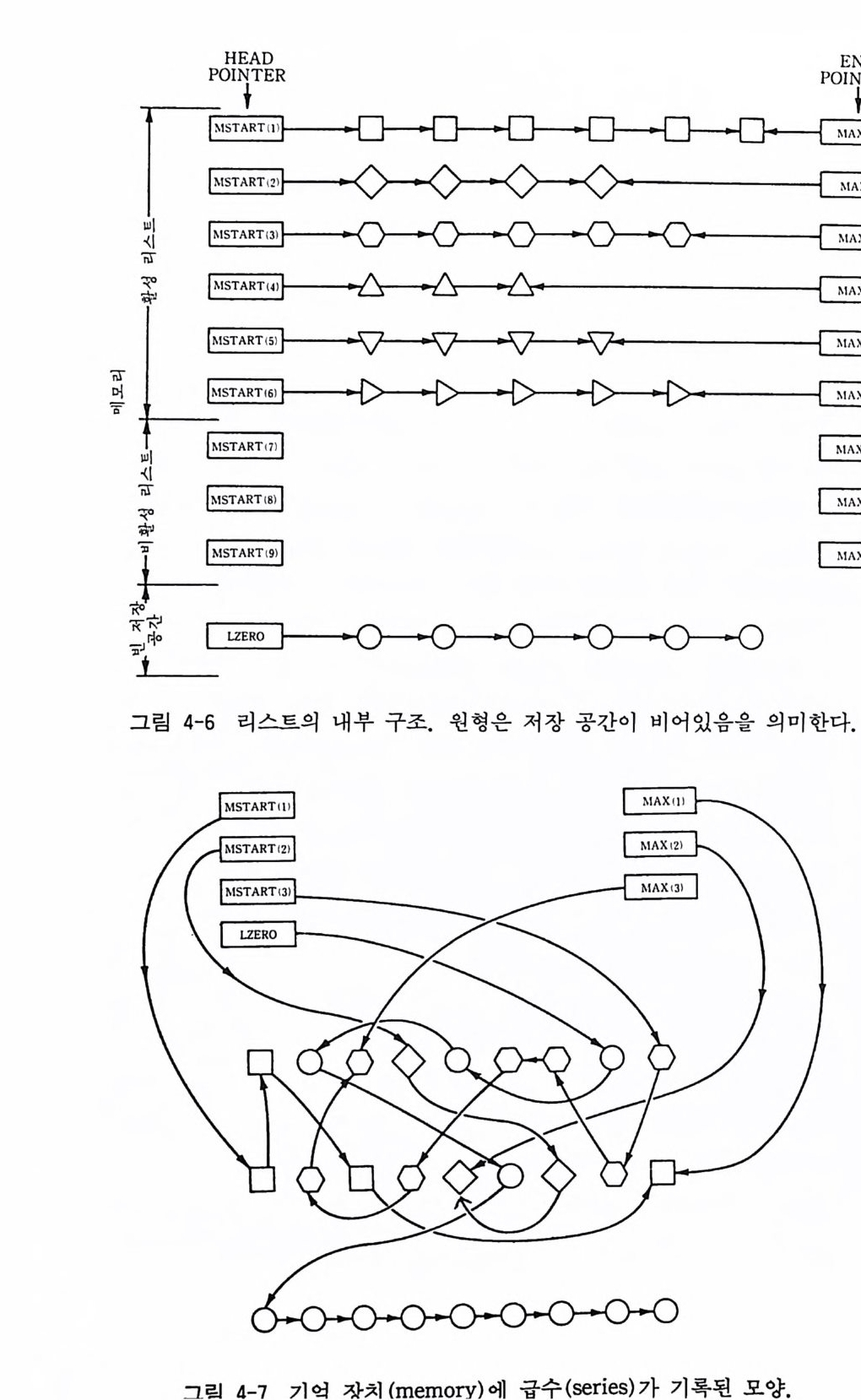 'w드드러ADTE POINtT ER
'w드드러ADTE POINtT ER
참고 문헌 Brouwer, D., 1959 , Astr o n. J., 64 , 378 . Brouwer, D. and Clemence, G. D., 1961 , Meth o d of Celestia l Mechanic s (Academi c : New York) . Boulet, Dan L., 1991 , Meth o ds of Orbit Dete r m i na ti on for the Mi cr o- comp u te r (W illm ann-Bell : Ric h mond) . Cain , B. J., 1962, Astr o n. ]., 67, 391 . Chris t e n sen, C. and Karr, M. , 1 970, I. A. M., A Sys t e m for Inte r acti ve Alge br aic Manip u lati on , CA-7010- 29 11 (Ap pl Data Res : Wakefi eld ) . Danby, J. M. A. , 1989, Fundamenta l s of Celestia l Mechanic s , 2nd edit ion (W illm ann-Bell : Ric h mond) Dasenbrock, R. R., 1973, Alge braic Manip u lati on by Comp u te r , NRL Re po r t 7564 (NRL : Washin g ton D. C.) . Dasenbrock, R. R., 1982, A FORTRAN-Based Prog ra m for Comp ut e r - iza ed Alge braic Manip u lati on , NRL Rep o rt 8 611 (NRL : Washin g ton , D. C.). Duby a g o , A. D., 1961 , The Dete r mi na ti on of Orbit s (The Macmi llian Comp a ny : New York) . Escobal, P. R., 1975, Meth o ds of Orbit Dete r mi na ti on , 2nd edit ion (Jo hn Wi ley & Sons : New York) . Fehlberg, E., 1968, NASA TR R-287. Jef f er ys , W. H. , 1 970, Celestia l Mechanic s , 2, pp. 474-480 Hearn. A. C., 1967, REDUCE User's Manual (Sta n fo r d Comp u ta t i on al Cente r : Sta n fo r d) . Henric i, P., 1962, Dis c rete Var iabl e Meth o ds in Ordin ary Di ffere nti al Eq u ati on (Jo hn Wi ley & Sons : New York) . Herge t, P. and Musen, P., 1959, Astr n . ]., 64, pp. 11-20. Hori, Gen ich ron, 1988, 『天體力 學講議 』 (東京大學 出版會 : 東京) .
Kaula, W. M., 1966, Tlieo ry of Sate l lite Geodesy (Blais d ell : Walth a m) . Kozai, Y., 1959, Astr o n. ]., 64, 367. Manove, M., Bloom, S. and Eng el man, G., 1966, Rati on al Functi on s in Math / a b , MTP-35 (Mi tre Corpo rati on : Bedfo rd ) . McCuskey, S. W., 1963, Intr o ducti on to Celestia l Mee/ za nie s (Addis o n- Wesley : Readin g ) , pp. 128-178. Roy , A. E., 1982, Orbit al Moti on , 2nd ed. (Adam Hige r : Bris t o l ) , pp. 156-194. Sammet, J. E. and Bond, E. R., 1964, Intr o ducti on to FORMAC, IEEE Trans. Electr o n. Comp u t. EC- 13 , pp. 386- 39 4. Taff , L. G., 1985, Celestia l Mecluznic s (Jo hn Wi ley & Sons : New York) , pp. 288-322. Townsend, G. E., Jr., 1963, Orbit al Fligh t Handbook vol. 1, pa rt 1, NASA SP-33 (NASA : Washin g ton D. C) . Walte r , H. G., 1 967, Astr o n. ]., 72, 994.
제 5 장 천체역학의 응용 5. 1 인공위성 관측 자료의 미분 보정 인공위성뿐만 아니라 비행기, 화학 공정, 국가 경제 등의 대부 분의 시스템의 경우에 이들 시스템으로부터 얻는 관측 자료는 이 시스템의 행동을 대표하는 수학적인 모델이 완벽하지 못하고, 시 스템의 행동을 관측하기 위해서 사용되는 관측 측정 장치가 잡음 을 항상 포함하고 있기 때문에 실제 상황과 일치하는 해를 구해 내는 것은 사실상 불가능하다. 따라서, 이와 같은 불확실성을 갖 는 관측 자료의 부정확함으로부터 실제 상황에 가장 근접한 정보 를 얻기 위한 방법이 지금까지 많은 학자들에 의해서 연구되어 왔다. 그 결과 관측 자료의 선정과 관심을 갖는 변수들의 특성에 대한 제한이라는 조건에 의해서 최적 추정 이론이 개발되었으며, 현재 여러 분야의 연구에서 다양하게 사용된다. 최적 추정 이론이란 한마디로 말해서 어떤 시스템의 상태에 포 함될 수 있는 모든 오차를 실제 관측 자료의 처리 과정을 통해 최소화시켜 주는 자료 처리 알고리즘이다. 초기의 추정 이론은
망원경을 이용해서 관측한 행성과 혜성의 관측 자료들로부터 이 들의 궤도를 결정하고자 하는 목적으로 만들어졌으며, 1795 년에 당시 18 세였던 K. G. Gauss 는 천체의 공전에 관한 문제를 해결 하기 위해서 최초로 최소자승법을 개발하였다. 이러한 추정 이론은 어떤 현상에 대한 측정값이나 관측값은 참 값에 대한 근사값에 불과하고 이것을 이용한 계산 역시 근사값일 수밖에 없다는 사실을 바탕으로 하여 가능한 한 실제적으로 참값 에 가장 가까운 근사값을 얻어내자는 데에 그 주된 목적을 두고 있다. 예를 들어, 어떤 시각에 있어서 천체의 상태는 6 개의 요 소, 죽 위치 (x, y, z) 와 속도 (x, y, z), 또는 그 천체의 궤도 요소들에 의해 정의된다. 이 경우 만일 관측이 완전하게 참값을 표시해 주고, 천체의 운동이 완전한 케플러 운동을 나타낸다면 단지 세 번의 관측에 의해서 천체의 운동에 대한 참값을 계산해 낼 수가 있다. 그러나 사설 관측시에 생기는 오차에 의해서 이들 관측 자료는 참값에 가까운 근사값에 불과할 뿐이며, 천체의 운 동 역시 완전한 케플러 운동이 아니라 섭동력을 포함한 운동이기 때문에 3 번의 관측에 의한 계산은 그 한계가 있다. 그러므로 가 능한 한 많은 관측 자료를 바탕으로 궤도를 계산하고, 운동 방정 식 역시 많은 섭동항들을 포함시켜야만 참값에 가까운 근사값을 얻어낼 수 있다. 일반적으로 추정 이론은 운동계의 특성, 관측 자료의 처리 방 식, 그리고 최적화 기준에 따라서 표 5-1 과 같이 분류할 수 있다. 표 5-1 에서 볼 수 있듯이 추정 이론은 우선 운동계가 선형인 가 비선형인가에 따라서 크게 두 가지로 나누어전다. 보통 관측 자료를 모두 저장한 후에 초기 상태 벡터의 값을 수정함으로써 실제 상태를 결정하는 방법을 배치 모드라 하고, 반면에 실시간
표 5-1 추정 이론의 분류 운동계 관측 자료 처리 방식 최적화 방식 선형 배치 모드 최소자승법 최소분산법 Jac kson 방법 RIDGE 형 추정 비선형 연속모드 Kalman-Bucy 필터 확장 Kalman 필터
궤도 추적을 하여 예측된 혹은 수정된 초기 상태 벡터 값에 의해 실제 상태를 추정해 가는 방법을 연속 모드라고 한다. 이 두 가 지 모드는 운동계의 종류에 상관없이 자료 처리 방식에 따라 나 누어지는데, 일반적으로 배치 모드는 많은 관측 자료를 바탕으로 전체적인 운동계의 특성을 분석할 때 주로 사용되며, 연속 모드 는 관측된 자료를 실시간에 처리하기 때문에 관측 시점의 운동계 의 특성을 연속적으로 점검하고, 원하는 상태로 계롤 조정 또는 제어하기 위한 작업의 기초가 되므로 실제 운동계의 운용에 주로 사용된다. 관측 자료의 최적화 기준은 최소자승법에 기초하여 다양한 방 법이 개발되었다. 일반적으로 최소자승법과 최소분산법 등은 배 치 모드에 주로 사용되지만, 이들 방법의 원리를 연속 모드에 적 용한 것 이 칼만 (Kalman) 과 부시 (Bucy) 등에 의 해 고안된 필터 의 개념이다. 보통 선형계의 경우에 있어서는 칼만-부시 필터를 사 용하고, 비선형계의 경우는 확장 칼만 필터를 사용하여 관측 자 료를 실시간 처리한다. 특히, 선형 칼만 필터라고도 하는 칼만 -부시 필터는 실시간 궤도 추적을 하여 하나의 기준이 되는 공칭 궤도에 따라 상태 벡터를 추정해 나간다. 이에 반해서 확장 칼만
 실제 궤 도 X (t)
실제 궤 도 X (t)
필터는 실시간에 따라 관측값을 기초로 하여 관측 시간이 경과할 때마다 공칭 궤도를 수정해 가면서 운동계를 추정하는 방식을 취 하고 있다. 그 의의 필터로는 최적화 과정에서 사용되는 상호 분산 행렬의 예측 _ 수정 형태에 따라서 i ) 안정화된 (Jo seph 형) Kalman 필터 ii ) Pott er -Schmi dt 연속 모드 필터 iii) Bie r man-T hornto n 인수분해 필터 등의 것들이 있다. 이와 같이 최소자승법에 대한 효율적인 컴퓨터 해라고 할 수 있는 칼만 필터는 현대의 확률, 통계 이론과 디지털 컴퓨터의 발 전에 힘입어 개발되었으며 , 1960 년 칼만은 불연속의 시간, 순환 평균 자승 필터에 대한 최초의 논문을 발표하였다. 이처럼 칼만 필터는 가우스의 최소자승법에 대한 재귀해로 볼 수 있으며, 다 음과 같은 특칭을 가지고 있다. 칼만 필터 방정식은 디지털 컴퓨터로 처리하기에 아주 편리한 형 태로 되어 있다. 칼만 필터의 개발에 관련된 이론적인 이해가 없어도 어떤 문제에 대해서 칼만 필터를 이용한 프로그램을 비교적 쉽게 만들 수 있다. 가우스의 최소자승법에 의한 계산은 모든 관측 자료 세트를 일괄 적으로 처리하기 때문에 하나의 상태를 계산하기 위해서 모든 관측 자료 세트롤 계산하고 저장해야만 한다. 칼만 필터의 이와 같은 특칭은 많은 계산 시간과 컴퓨터 메모
리를 필요로 하기 때문에 실시간 계산에 적용시키기 어렵게 만든 다. 하지만, 칼만 필터는 최소한의 데이터로부터 얻은 초기 조전 또는 가상적인 초기 조건으로부터 계산을 시작하고, 각 관측 자 료 세트를 하나의 포인트로 취급하여 새로운 포인트는 이전의 변 수 계산에 합해져서 상태를 개선시키면서 진행되어 나간다. 이러 한 과정은 새로운 관측 자료 포인트가 입력될 때마다 반복되며, 어떤 때라도 그때까지의 시스템 상태와 오차를 확인해 볼 수 있 다. 이러한 방법에 의해서 계산 속도와 메모리를 절약할 수 있기 때문에 실제로 칼만 필터를 실시간 계산에 응용할 수 있다• 5.1.1 배치 모드 5.1.1. 1 상태 벡터와 상태 방정식 일반적인 경우에 인공위성의 궤도와 자세 등의 역학 시스템은 항상 의부의 힘에 영향을 받고 있으며, 그 운동은 어떤 방식으로 든 관측이 되는 운동체들로 구성되어 있다. 예를 들어, 인체는 매우 복잡하기는 하지만 일종의 시스템이고, 시계추도 역시 하나 의 시스템으로 볼 수 있다. 각 시스템에 대해 상태라 불리는 양 울 기술하고, 이 양들을 시간과 같은 독립변수들의 변화에 따른 시스템의 진행을 기술하는 데 사용한다. 시스템의 전행을 기술하 는 데 사용되는 상태는 과거에는 주로 주파수 영역을 사용하였으 나, 최 근에 는 Pontr y a g in, Bellman, L y a p unov 와 Kalman 등의 주도에 의해 시간의 영역을 많이 사용하고 있다. 시스템의 상태는 일반적으로 X (t)의 형태로 표현되는데, 이 때 t는 독립변수로서 운동하는 물체의 좌표인 경우도 있으나, 많은 경우에 있어서 대개 시간을 나타낸다. 보통 우리가 관심을 갖는 시스템의 상태는 유한 개의 벡터의 형태를 갖기 때문에 다
음과 같이 나타낼 수 있다. XI(t) K_(t) = , X2(t) 5-1 Xn(t) 이때 죠(t)를 상태 벡터라고 하며, 밑줄 〈 — 〉 는 벡터를 의미한 다. 일반적으로 상태 벡터는 인공위성과 같은 운동하는 물체의 시간에 따른 운동 상태의 변화를 정의하는 데 필요한 모든 시간 에 대한 종속변수들과, 위성 운동을 유일하게 결정하는 상수 요 소들을 모두 포함한다. 예를 들어 상태 벡터에 기본적으로 포함 되는 변수들은 위성의 관성 좌표계 상에서의 위치와 속도, 위성 의 운동방정식을 구성하는 불확실한 요소 등이 있다. 시간에 따른 상태 벡터의 변화를 나타내는 식을 상태 방정식이 라 하며, 운동계의 경우에 있어서 상태 방정식은 츠(t) =F(t)_ K(t) + G (t).!Y_(t) +L (t)브(t) 5-2 X(t) =F(X(t) , t)+브(t) 5_3 와 같은 형태로 표시된다. 식 5 - 2 는 선형계의 경우이고, 식 5-3 은 비선형계의 경우를 나타낸다. 여기서 쁘(t)는 위성의 경우 우 리가 알지 못하는 임의의 의력으로서 임의의 의력 함수라 정의하 고, 브(t)는 시스템의 제어를 위해 작용한 힘을 의미하며 제어 입력이라고 한다. 운동계의 운동은 식 5-2 와 식 5-3 에 의해서 유일하게 결정된 다. 이 경우 방정식의 해는 일반적으로 죠(t) = 0 (츠 . , to, t) 5-4
의 형태로 나타난다. 위 식에서 보면 임의의 시간 to 에서의 위성 의 상태 벡터 죠(t)는 초기 상태인 죠 6, to 의 함수로 표시됨을 알 수 있다. 그러나 실제 궤도를 결정하는 경우에는 죠 6 의 값을 완 벽하게 알 수 없으므로, 실제 궤도에 대한 실제 해 쓰(t)는 공 칭 궤도에 의한 공칭 해 죠*(t)와는 차이가 있다. 결국 상태 방 정식을 풀기 위해서는 죠 5 를 가능한 한 알아야 하고, 관측으로부 터 X.O를 추정해야만 한다. 이 경우 모든 관측 자료는 오차를 포 함하고 있으므로, 오차에 의해 왜곡된 상태 벡터와 실제 상태가 어떤 관계를 갖는가를 알게 되면, 이 둘 사이의 관계를 이용하여 관측 자료로부터 실제 상태를 추정해 낼 수 있다. 5. 1. 1. 2 관측과 상태의 관계 앞에서 살펴본 바와 같이 일반적으로 상태 벡터 효(t)는 직접 관측되지 않으므로, 궤도 결정 문제는 위성의 운동을 직접 관측 함으로써 해결해야 한다. 이 경우에 관측되는 자료는 상태 벡터 X( t)를 반영하는 그림자로서 생각할 수 있다. 일반적인 물체의 그림자는 광원의 세기, 광원과의 거리, 그리고 물체와 그림자가 맺히는 공간의 특성 등에 의해서 결정되지만, 무엇보다도 물체 그 자체에 크게 의존한다. 마찬가지로 운동계의 운동을 관측하여 얻은 자료 역시 상태 벡터 죠(t)와 밀접하게 관계되어 있으며, 이들 관측 자료와 상태와의 관계는 Zk=Hk설 E+ 으 k 5-5 Zk=Hk (Kk) +!!_k 5-6 의 형태로 나타낼 수 있다. 이때, 식 5-5 는 관측 자료와 상태 벡터가 모두 선형인 경우이 고, 식 5-6 은 비선형인 경우를 나타낸다. 으 k 는 관측 오차를 의
미한다. 대부분의 있어서 관측된 자료는 실제 상태에 대한 비선 형 함수라는 것과 관측값은 관측 과정에서 발생하는 임의 오차의 영향을 받는다는 것이 중요한 문제로 대두된다. 이해를 돕기 위해 관측 자료와 상태 벡터와의 관계를 예로 들 어 생각해 보기로 하자. 위성의 궤도를 결정하기 위해 도플러 변 이 관측값을 측정하였다면, 이때의 관측 자료는 시선거리 변화율 p가 되고, 이것이 식 5-5 와 식 5-6 에 나타나는 Zk 에 해당하게 된다. 이 경우 시선거리 변화율과 상태 벡터로 사용한 궤도 요소 와의 관계를 식 5-3 과 같은 형식으로 나타내면 아래와 같이 표시 할수있다. p = p (a, e cos (J}, e sin (J}, Q, i, M, T) 5-7 p = p (x, y, z, x , y , z ) 5-8 여기서 식 5-7 은 상태 벡터를 궤도 요소인 쵸 =(a, ecos (J}, e sx,i n y(J,}, z요), 로 i,정 의M,한 T경) 우로이, 다식. 5 - 8 은 상태 벡터를 죠= (x, Y, z, 또한, 상태 벡터의 시간에 대한 변화율을 나타내는 상태 방정 식과, 상태 벡터와 관측 자료 사이에 나타나는 관계식은 선형계 와 비선형계인 경우에 각각 쵸(t) =F( t)죠(t) + G (t)뜨(t) +L( t)브(t) Zk=HkKk 十브 k 5-9 효(t) =F( 츠(t), t) +쁘(t) Zk=Hk( 설,.) +!!._k 5-10 의 형태로 정리할 수 있다. 그러나 식 5-10 의 경우에 상태 벡터 는 F 와 H 의 비선형 함수 형태를 갖는다. 일반적으로 최소자승법을 기초로 하는 최적 추정 이론의 기본
구조는 상태 방정식을 적분하여 tk 一 t k+1 에서의 상태 벡터를 예 측하고, 이것을 관측 자료와의 관계식에 대입하여 얻은 계산된 관측 자료와 실제 관측 자료 사이의 차이가 최소가 되는 상태 벡 터를 구하는 과정으로 이루어져 있다. 따라서, 이와 같은 추정 이론을 적용하기 위해서는 비선형 방정식은 부적절하며, 반드시 선형화의 과정을 거쳐야만 한다. 5.1 .1. 3 비선형 방정식의 선형화 실제 상태 벡터 죠(t)와 이론적인 상태 벡터인 공칭 상태 벡 터 죠*(t)가 특정 시간 간격 t os t s t;에서 충분히 근접해 있다면 Tay lo r 급수 전개를 이용하여 공칭 상태에 대한 선형화한 방정 식을 구할 수 있다. 죽, 쵸(t) =F(]S_ _(t), t) +쁘(t) 5-11 Zk=Hk (설k , tk) +으 k 5-12 롤 공칭 상태 벡터 죠*(t)에 대해 Tayl o r 급수 전개하면 쵸갈* + 澤 ]1 죠―죠*] 十 … + Wk J k=h( 죠도) +[률][설k 홉]+… +Vk 5-13 의 관계식을 얻을 수 있다. 이때 츠(九)=죠(t k) ―죠*(t) ; fo :S::t입 1 Zk=Zk ― h( 효:(t k), tk) ; k=l… l 5-14 라고 정의되며, 만약 죠(t k) 와 죠*(九)가 충분히 근접하다면, 2 차 이상의 항은 무시하여 나타낼 수 있다. 또한, 식 5-13 에서
A( t) =[醫『, H (tk) =[률]* 5-15 라고 정의하면, 위 관계식들에 의해서 식 5-14 는 결국 아래와 같 은 형태로 나타내어진다. _i (tk) =A (tk) 상九) , x (to) =쓰 Zk=Hk Xk+ Vk 5-16 위 식에서 보면 미지의 상태 벡터 설o 는 실제 상태 벡터와 공칭 상태 벡터의 차 츠 o 로 치환되었으며, 비선형의 문제는 관측 자료 가 선형화 상태와 관계 있는 식으로 바뀌었음을 알 수 있다. 이제 식 5-9 의 일반 해롤 구해보도록 하자. 여기에서는 문제를 간단히 하기 위하여 임의의 의력 함수인 브(t)는 없다고 가정하 기로 한다. 이 경우 식 5-9 의 상태 방정식은 쵸(t) =F( t)죠(t) +L (t)브(t) 5-17 의 형태로 주어지며, 이때 시간 간격 (r-Llr, r) 에서 브(t)가 i 번째 상태 벡터에 주는 영향은 다음과 같이 L(r) 브 (r) 와 4 t의 곱으로 나타낼 수 있다. LJX ;(r) = (L(r 난 (r)) 먀 5-18 이 식은 모든 상태 벡터에 대해서는 L1X1 (r) 4죠 (t) =| 4X2: (r) |=L(r) 브 (r)Llr 5-19 oXn(r) ~ 가 되므로, . 상태 벡터의 변화에 의한 영향은
4죠 (t) =
의미하는데, 이런 의미에서
가 된다. 이와 같은 과정을 통하여 일반적으로 나타나는 비선형 방정식을 최소자승법 또는 최소분산법을 사용할 수 있는 선형의 방정식으로 바꾸어 줄 수 있다. 이제 지금까지 설명한 선형화 과정을 식 5-7 에 적용하여 보도 록 하자. 이 경우 도플러 관측 자료는 p가 되고, 관측 오차를 무시한다면 상태 벡터와의 관계는 다음과 같이 주어진다. Zk=Hk (죠k , fk) -+ p = p (a, e cos (JJ, e sin (JJ, Q, i, M, T) 이때, 선형화를 위해 p를 상태 벡터에 대해 식 5-13 과 같이 Tay lo r 급수 전개 하고 식 5-14 로 치 환하면 관측 자료의 변화량은 4 p 1= 뭉 L1a+~ (J)L 1e cos (J)+ 8e:<\ (J) L 1esin (J) +醫4 요+誓 Ll i+醫 4M+ 罰 -LIT 5-30 가 된다. 이 경우에 앞에서 보았던 [::『 논 각각 -¥a-, 8e :Ops (J) ’ …, 붉-가 되고, 4p i= (p。) ,._ 体) i의 값을 갖는 다. 여기서 Po 는 관측 자료, p .c 는 계산값을 나타낸다. 만약 관 측이 모두 n 번 시행되었다면, 식 5-30 은 Ll p 1= 誓 4a+ 8e?길 (J) Lle cos (J)+…+碧 4T 4 p 2= 誓 Lla+~ (J)L le cos (J)+…+停 4T 4 p n= 誓 -4a+ 8e?심 (J)L le cos (J)+…+1/,;-LJT 5-31
와 같은 형태로 표시되며, 식 5-31 을 식 5-28, 5-29 와 같이 행렬 로 나타내어 선형화된 방정식을 구해보면 아래과 같이 나타난다. 4a 4p I L1e cos (1) 4p 2 LJe sin (J) =ND 4.Q 5-32 4p nJ 4LMli 4T 위 식에서 ND 는 식 5-29 에서 나타나는 H와 같은 의미를 갖는 미분 보정 행렬이며, 그 전치 행렬 Nl는 革aa aopa n ap 1 ap n ae cos (J) ae cos (J} ap I ap n ae sin (J) oesin (/) NJ = I 요8 요 뚜a 요 5-33 요ai 호ai 革oM 뚜oM L 뚜aT 뚜aT 와 같은 형태를 갖는다.
일반적으로 식 5-16 에서 Jl. k=O 인 경우, Xk 를 쉽게 결정할 수 있으나, 대개의 경우에 있어서 브 k 는 0 이 아니므로 최소자승법이 나 최소분산법을 사용해서 m 를 구해야만 한다. 5.1 .1.4 최소 분산 추정법 최적화 이론과 추정 이론을 도입하기 위해서는 확률과 통계의 개념을 이해하고 있어야 하는데, 자세한 내용은 확률과 통계를 다룬 교재를 참고하기 바라며, 이 책에서는 최소 분산 추정법의 이해에 필요한 몇 가지 내용에 대해서만 설명하기로 한다. i ) 확률 변수 주사위를 던질 때 나타나는 눈의 수를 생각해 보자. 이때 눈의 수는 1 에서 6 까지의 값을 취할 수 있으며, 각 수 값은 1/6 의 확 률을 가지고 우연에 의하여 나타난다. 이때 주사위를 던져서 나 오는 눈의 수를 확률 변수라고 한다. ii) 확률 분포 한 번 던진 주사위의 눈의 수는 공히 1/6 의 확률을 가지고 1 에 서 6 까지의 값을 취한다. 이와 같이 확률 변수의 수 값들에 확률 을 대응시켜 주는 관계를 확률 분포라고 한다. 예를 들어 2 개의 동전을 던지는 실험을 생각해 보자. 이 경우 표본공간은 {(H, H), (H, T), (T, H), (T, T) }가 된다. 여기서 우리는 앞면 {H} 의 개수에만 관심이 있다고 가정하고, 앞 면의 개수를 나타 내는 변수를 x 라 하자. 그러면 (H, H) 에는 x=2 가 대응되고 (H, T), (T, H) 에는 x=l, (T, T) 에는 x=O 이 대응된다. 이 경우 각각 의 확률 변수 x 에 대응하는 확률은 아래와 같은 확률 분포로 정해전다.
X 。 1 2 합P(x) 1/4 2/4 1/4 1
iii) 확률 변수의 기대값 개개의 확률 변수들의 일어날 확률이 같은 경우 이들의 평균은 확률 변수의 합을 발생 횟수로 나누면 된다. 하지만 확률 변수들 의 확률이 서로 다른 경우 이들의 평균은 앞의 경우처럼 단순하 게 결정할 수는 없다. 이 경우 각 변수들에 대한 기대값을 E(X) 라고 하면 불연속 확률 분포의 경우와 연속 확률 분포의 경우에 그 값은 각각 아래와 같이 나타난다. n E(X) =~ PiX i E(X) =Ji=_ I: x fx ( x) dx -oo 이때 fx (X) 를 확률 밀도 함수라고 정의한다. iv) 확률 변수의 분산과 표준편차 확률 변수의 표준편차는 분산의 제곱근으로 정의되며 그 값은 각각 다음과 같이 나타난다. 분산 :
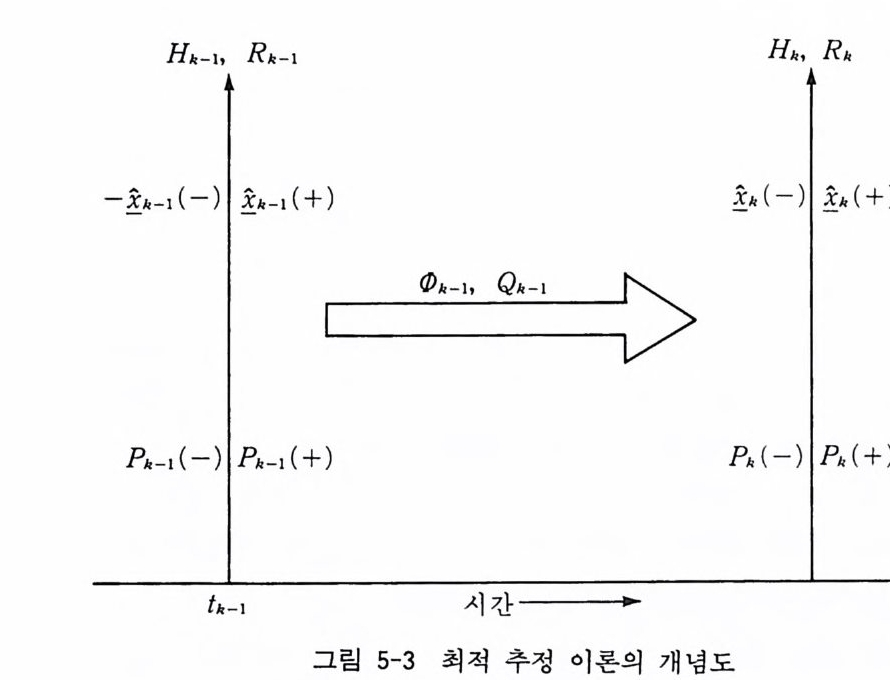 Hk- 1, Rk-1 Hk, Rk
Hk- 1, Rk-1 Hk, Rk
수정된 최적화 상태 벡터를 의미한다. 또한, (-)는 최적화 상태 벡터를 다음 시각으로 전이시켜 예측한 추정값을 나타낸다. 이것 둘을 그림 5-3 에 나타내 보았다. 여기서 gk -1(-) 는 관측 자료 Zk_1 을 얻기 이전의 예측된 추 정값이고, 쵸k -1(+ )는 관측 자료에 의해 최적화된 추정값이다. 또한, &(-)는 앞에서 얻은 효i. -1(+) 를 t=t k 에서 전이시킨 예 측된 추정값이고, lk 에 의해 최적화 된 추정값이 바로 Zk 가 된 다. 표 5-1 에서 보면 배치 모드에 적용되는 여러 가지 추정법이 있 으나, 이 중 최소 분산 추정법은 임의 오차에 대한 완벽한 통계 학적 해석이 필요하지 않고 오차의 분산이 다른 추정법에 비해 작거나 같은 값을 갖는 특성이 있으므로, 지금부터 이 방법에 대 해서 보다 자세히 설명하기로 하겠다.
일반적으로 최소 자승 추정법은 실제 관측 자료와 추정값에 의 해 계산된 관측 자료 간의 차이인 ii-ti의 제곱의 합 ]= (Z-H之 )T(Z-H걷 5-34 가 최소가 되는 것을 추정된 상태 벡터(이하 추정값) 초의 조건 으로 하므로, 추정값은 다음의 식을 만족해야만 한다. 48X= o 5-35 이 경우에 있어서 식 5-35 를 만족하는 추정값은 쵸= (H7H)-1H 望 5-36 의 형태로 나타난다. 반면에 각각의 관측 자료에 가중치 W가 주어전 경우는 J= (K-Hf> Tw-1 (K-Jf걷 5-37 초= (H7w-1H) 가 rw - 1K 5-38 의 값을 가지며, 이것을 가중 최소 자승 추정이라고 한다. 일반 적으로 최소 자승 추정법은 상태 벡터 죠와 관측 자료 Z 에 대한 확률 밀도 함수의 사전 지식이 없을 때 많이 사용된다. 하지만 이들에 대한 사전 지식이 있는 경우는 최소 분산 추정법을 사용 하여 좀더 정밀한 추정을 할 수 있다. 우선, 대부분의 운동계는 비선형계이므로 5. 1.1. 3 절에서 살펴 본 바와 같은 선형화 과정을 거쳐 식 5-26 과 식 5-28 을 얻었다고 가정하자. 일반적인 경우에 있어서 이 식들은 아래의 통계학적인 조건을만족한다. E[ 피 =O 5-39a E[ 판만 ]=R, . 5-39b
E[ (쓰―쵸 _!'.!.n=o 5-39c 여기서 식 5-39a 는 관측 오차의 평균이 0 임을, 식 5-39b 의 R 는 관측 상호 분산울, 그리고 식 5-39c 는 추정 상태 벡터와 관 측 오 차가 서로 무관함을 의미한다. 이 식들은 식 5-28 과 같이 행렬로 값은 치 환할 수 있으며 , 이 경 우 식 5-39a 와 식 5 - 39b 는 E[ 브!] R 。 E[ 파 =|EE[[ 터 .퍼 I ’ E[ 으 군]= ,o R2 R:3 Rk 5-40 의 형태로 나타난다. 일반적인 경우 R1=R2= … =Rh 의 관계가 성립하지만, 문제를 해결하는 데 반드시 필요한 조건은 아니다. 그러나 E[ 브i 깝 ]=R u 이고, R 행렬의 비대각선 성분이 0 이 아닌 관측 오차의 경우에는 최선의 선형 비편향 최소 분산에 입각하여 다음과 같은 방법으로 디루어야 한다. i ) 선형화 선형 추정이 요구하는 사항은 추정과 관측의 관계가 선형 결합 으로 이루어져 있음을 의미한다. 죽 츠 k=M 츠 k 5-41 의 형태로 표현된다. 식 5-41 에서 M 은 최적의 추정을 얻기 위해 앞으로 결정해야 할 (nXn) 행렬로서 관측값으로부터 최적의 추 정값을 구해내는 선형사상 행렬이라고 한다. 일반적으로 식 5-41 의 선형사상 행렬은 다음에서 설명할 가정과 조건을 이용하여 구 할수있다.
ii) 비편향 위에서 설명했듯이 추정값 츠 k 의 평균값이 실제값의 평균값과 같은 경우에 흔히 추정값이 비편향되었다고 한다. 만약 추정값이 비편향되었다는 가정을 하면 E[ 츠 d= 꾹 5-42 의 값을 갖게 되고, 이 경우 식 5-41 에 기대값을 취하면 E[Mz]=E[MH 硏모』=쟌 5-43 가 된다. 이때 가정에서 E[ Y,』 =0 이므로, MH 쟌=꾹가 되고 여기서 M 은 다음의 조건을 만족해야 한다. MH=I 5-44 식 5 - 44 는 선형사상 행렬 M 과 H 의 관계를 나타내는 식으로, 추정값이 비편향이라고 가정한 경우 선형사상 행렬 M 은 반드시 식 5-44 를 만족해야 한다. 이제 이 조건을 이용하여 최소 분산법 울 적용해 보도록 하겠다. iii) 최소 분산 추정값이 비편향이라는 가정 하에서 구한 식 5-44 를 이용하여 분산 행렬을 나타내면 아래와 같이 나타난다. Pk=E[( 츠 k_E[ 츠』) (츠 h_E[ 츠 k ]T)] =E[ (츠 k ―킵 (츠 k_츠 k) T] 5-45 이제 식 5-43 과 식 5-44 를 동시에 만족하고, 최소분산법에 의 해서 분산 행렬인 식 5-45 를 최소화하는 츠 k 를 구해 보도록 하 자. 이를 위해 식 5-43 을 식 5-45 에 대입하여 정리하면
Pk=MRMT.R=E[!j_k 싼月 5-46 의 관계를 얻을 수 있다. 이때, 분산행렬 Pk 는 대칭 행렬이므로 성능 지수 A 를 이용하여 나타내면 Pk=MRM7+A7( I-M H) r+ (I-M H) A 5-47 의 형태가 된다. 여기서 성능 지수 A 는 nxn 의 라그랑주 미정 계 수 행렬이다. 이 경우 최소분산법의 의미 그대로 분산 행렬 P따 최소이기 위한 필요조건은 aPk= (MR-A7H 까 8MT+8M[RMT-HA] +oA7[I -M HF+ U-MH) oA= o 5-4 8 이 되며, 식 5-48 은 임의의 8M, 8A 에 대해서 항상 성립해야 하 므로, 이로부터 MH-1=0, MR-A7H7=0 5-49 의 관계를 얻을 수 있다. 식 5-49 에서 비편향이고 동시에 최소 분산울 만족하는 선형사 상행렬을 구하면 M= (HTRH-1)-1HTR-1 5-50 이 된다. 이 경우 식 5-50 을 식 5-46 에 대입하면 최소 분산 행 렬은 PK= (HTR-1H)-1 5-51 의 형태로 나타나며, 식 5-50 의 선형사상 행렬을 식 5-41 에 대입 하여 분산울 최소화하는 관점에서 최적 추정을 구하면 아래와 갇 이 표시할 수 있다.
츠 k= (H7R-1H)-1H7R-1 츠 5-52 위 식은 관측 때마다 항상 잡음값을 알 수는 없으므로 관측소의 관측 잡음의 평균값에 대한 분산을 고려하여 처리한 점이 특칭이 라 할 수 있다. 여기서 만약 R-1=W 라고 생각하면 식 5-52 는 가중 행렬이 W 인 가중 최소 자승 추정법과 같은 형태를 가 전다. 5. 1. 1. 5 배치 모드에의 적용 우리는 앞 절에서 최소 분산 추정법에 의해 추정값 츠 h 와 상호 분산 Pk 를 식 5-52, 5-51 과 같이 구하였다. 이제 이 절에서는 앞에서 설명한 배치 모드를 적용하여 실제 계산 과정을 단계적으 로 하나씩 살펴보도록 하겠다. i ) 제 1 단계 이 장의 처음에서 설명했듯이 배치 모드는 전체 관측 자료를 모두 저장한 후에 초기 상태 벡터 Ko 의 값을 반복해서 수정함으 로써 그 운동계를 결정한다. 그러므로 상태 벡터의 추정을 위해 대략적인 초기 상태 점 5 와 관측 자료, 그리고 최소분산법을 적용 하기 위한 관측 오차 상호 분산 R 이 주어져야 한다. 츠 a : t=t o 에서의 초기 상태 ii-I : t=t .--1 에서의 관측값, i= l, …, 1 R: 관측오차상호분산 ii ) 제 2 단계 식 5-11 에서 임의의 의력 함수 쁘(t)가 없는 경우를 가정하자. 이 경우 상태 방정식과 상태 전이 행렬은
v) 제 5 단계 제 4 단계의 방법을 마지막 관측값까지 반복 처리하여 이들의 총합을 구한다. L1=H7R-1H M1=H7R- 1z 5-57 vi) 제 6 단계 위에서 얻은 결과를 식 5-51 과 식 5-52 에 대입하여 완, Pt 의 값을 구한다. vii) 제 7 단계 이 츠j, PJ 의 값으로부터 다음과 같이 개 량된 초기 상태 벡터 룰 구할 수 있다. xt+ ' =XJ + 굿。i 5-58 여기서 죠d +1 는 제 1 단계부터 i번 계산울 반복하여 얻은 값으로 초기 상태 벡터로부터 i十 1 번 개량된 것을 의미한다. viii) 제 8 단계
매번의 계산마다 Ll=I 츠i+ l_ 전 1 5-59 S=[L! (감) / (m+ 1) 1112 5-60 의 값을 결정하여 미리 정한 기준 TOLl, TOL2 에 대해 각각 LJ< TOLl, RMS5.1.2 연속 모드 추정 알고리즘 우리가 관심을 갖는 인공위성의 운동계를 포함하는 모든 시스 템은 수많은 변수들로 이루어져 있다. 이 시스템을 조정 혹은 제 어하기 위해서는 이들 변수들의 시간에 따른 변화를 가능한 한 정확히 알아야만 한다. 이와 같은 변수들의 시간에 따른 변화를 알기 위해서 다양한 방법으로 시스템을 관측하여 관측 자료를 얻 게 되는데, 이 관측 자료들을 관측 순간마다 실시간으로 처리하 여 최적의 변수를 구해내는 방식을 연속 모드라고 한다. 이러한 연속 모드를 대표하는 것이 바로 칼만 필터이며, 이것은 실시간 추정을 위해 과거의 관측 자료를 저장할 필요가 없는 최적화 순 환 알고리즘이다. 여기서 참깐 칼만 필터의 특칭인 순환 알고리즘의 정의에 대해 서 간략히 알아보기로 하자. 예를 둘어 정지위성까지의 거리를 레이저 광선을 이용하여 k 번 측정하는 경우에 이 위성에 섭동이 작용하지 않아 위성 자체의 위치가 변화하지 않는다고 가정하자. 이 경우 최소 분산 추정값 )(k 는 (xk = —1k 고k Zi_ 5-62 타
의 값을 가지며, 이는 측정값들의 평균을 의미한다. 만약 이후에 새로운 관측이 수행되어 Z k+ I 의 관측값을 얻었다면 이때의 새로 운추정값은 Xk+l= 갑접 z i =」i 집 z,) +같군 +1=¾i x다 같 Z k+ I =Xk+k~+(1Z k+I- Xk) 5-63 의 형태로 얻어낼 수 있다. 위 식에서 볼 수 있듯이 여기에는 과 거의 측정값을 포함하는 항이 존재하지 않는다. 여기서 (Z1< +1 ― Xh) 는 관측과 관측 이전의 추정값의 차를 의미하며 관측의 횟 수 k 가 증가할수록 이둘이 새로운 추정값에 기여하는 정도는 작 아진다. 또한, 위 식에서 G= k1+ l 은 일종의 가중값을 의미한 다. 만약 G 가 관측 횟수가 아니고 1 에 가까운 값을 가지면 식 5-63 은 _ xk+1 터 ?k+l 5-64 이 되므로, 추정값보다 관측값에 의존함을 나타낸다. 반면에 G :::::: 0 이면 식 5-63 은 xk+1:: :::x h 5-65 가 되어 관측 자료를 신뢰하지 않음을 의미한다. 칼만 필터에서 는 이러한 G 의 값울 칼만 이득이라고 하며, 이것은 칼만 필터의 중요한 특징이 된다. 이제 이러한 특칭들을 바탕으로 흔히 선형 시스템에 많이 사용 되는 선형 칼만 필터에 대해 알아보도록 하자. 먼저 t=t k 에서 상태 벡터가 설k 이고, 임의의 의력 함수가 쁘 k 로 주어지는 불연속 운동계를 가정하고, 이 운동계의 관측 자료 가 상태 벡터와 선형의 관계를 가지고 있으며 관측 오차 2k 의 평균은 0 이라고 생각하자.
Xk = (J)k -lXk-1 + Wk-1 Zk=HkXk+Vk 5-66 tk 에서 운동계의 이전 추정값 gk( -) (pr io r esti m ate , t k 에서 관 측 자료에 의해 수정되지 않은 예측치)가 주어졌을 때 Z k 에 의해 개량된 추정값 홈k (+) 를 구해 보면, 앞에서 설명한 바와 같이 칼만 필터는 연속 모드아므로 과거의 관측값을 포함하지 않고 단 지 이전 추정값과 관측 자료만으로 다음과 감이 나타낼 수 있다. 多(+) =Ki 쓰(_) +K& 5-67 식 5-67 에서 K와 Kk 는 앞으로 결정해야 할 시간에 따라 변하는 가중치 행렬이며, 이 경우 효k (+) 와 gk (- )는 각각 &(+) =선다쯔 k(+) 5_68 효k ( ―)=참k +~k(-) 5-69 의 형태로 표시된다. 식 5-68 과 5-69 를 식 5-67 에 대입하여 쟌(+)에 대해 정리하 면 츠 k=[K!,+KkHk-1] 죠~ +Kf ,_! k (-) +K屯 k 5-70 의 관계를 얻을 수 있으며, 이때 꾹(+)와 츠 k(- )는 비편향이어 야 한다. 앞의 가정에서 E[ 으』 =0 이므로 식 5-70 에 기대값을 취 하면 E[ 츠 k(+) ]=E[ (Kf , +KkHk ― I) 죠』 +E[K f,_! k (—) ] +E[K러 =E[K!,+KkHk-I]E[ 죠』 =0 5-71 의 값을 갖는다. 여기서 위 식이 만족하기 위해서는 K,,=J - KkHk 5-72
의 관계가 만족되어야 하며, 식 5-72 를 식 5-67 과 5-70 에 대입하 면, gk( +) =홍(키 +Kk[Ik ― H 홉(一)] 5-73 쯔 k(+) = (I― KkHk) 쯔 k( 一) +K따 5-74 의 값을 구해낼 수 있다. 이제 식 5-73 과 5-74 를 이용하여 개량된 오차 상호 분산을 구 해보자. 일반적으로 오차 상호 분산은 A(+) =E[ 츠 k(+) 간(+)] 5-75 의 형태로 주어지므로, 식 5-75 에 식 5-74 를 대입하고 E[ 쯔 k (-) !I<-) ]=A (-) E[ 으 k 판 ]=Rk E[ 쯔 k(-) 리 =E[ 으 k 츠깁=O 의 관계를 이용하여 정리하면 개량된 오차 상호 분산은 pk (+) = (I-K kHk)p k (-) (I-K kHk)r+KkAKl 5-76 와 갇이 계산해 낼 수 있다. 이러한 오차 상호 분산을 이용하면 우리는 쉽게 칼만 이득 Kk 를 구해낼 수 있다. 이 경우 Kk 는 오차 상호 분산 pk 의 대각선 성분의 합이 최소가 되는 조건을 만족해야 하므로 ]k =E[ 간(+)츠 k(+)] 의 값이 주어졌을 때 다음의 관계가 성립해야 한다. 깊드 -2 (/-KkHk) pk (-) Hl+2KkA =O a츠 k 여기서 칼만 이득은
표 5-2 불연속계의 선형 칼만 필터 역학모델 Xk= (JJk -lXk- 1 + Wk- I, Wk~ N(O, Qk ) 관측모델 Zk = HkXk + Vk, Vk~N(O, Rk) 초기 조건 E[ 쪼 (0)]= 혼 E[ (즈 (0)- 훈) (쪼 (0) -多)기 =P。 가정 E[wk 퍼 ]=O for all j, k 상태 벡터 추정 Xk(-) = q;k- lX k- 1(+) 오차 상호분산 추정 A= (/Jk -1A- 1( +) (/)k- i7 +Qk -1 개량된 상태 벡터 홍(+) =훈(-) +Kk[?_k-Hk 훈(-)] 개량된 오차 상호분산 A(+) =[1-KkHk]A(-) 칼만 이득 행렬 Kk =A (-) HZT.H k A (-) H[+ Rk]-1
Kk=A(-)HZIH 따 (-)Hl+R 』 -I 5-77 와 같은 값을 갖는다. 위 식을 식 5-76 에 대입하여 정리하면 결 국 pk (+) =[/-KkHk]A (-) 5-78 가 된다. 지금까지의 결과를 표 5-2 에 정리해 보았다. 5.1.3 확장 칼만 필터 확장 칼만 필터는 비선형의 운동계를 실시간 궤도 추적을 하여 관측 시간마다 공칭 궤도를 수정하면서 그 궤도를 추적해 나가는 방법이다. 이 방법에서는 5.1. 2 절과 마찬가지로 관측 자료의 처 리를 위해 최소 분산 추정을 그 조건으로 적용한다. 일반적으로 이 계의 운동 방정식과 관측 자료는 X(t) =f(X (t) , (t)) +타) 5-79 zk=hk (X(t) , t) +브 k 5-80
와 갇이 주어진다. 여기서 식 5-79 는 운동계가 연속적임을 의미 하고, 뜨(t)는 평균이 0 인 가우스 분포의 의력 함수를 나타낸다. 또한, 식 5-80 은 관측이 불연속으로 행해짐을 의미하며, 이때 므 k 는 상호 분산이 Rh 이고 평균이 0 인 관측 오차이다. 식 5-79 와 5-80 을 5. 1.1. 3 절과 같은 방식으로 선형화하면 이때 의 운동 방정식과 상태는 다음과 같이 나타난다. 초(t) =F( 초(t) , tE (t) , 츠(t o) =츠0 5-81 쯔 k= 旦 h (多 (—) )츠 k+!!_k 5-82 여기서 F 와 H 는 각각 F( 효(t)' t) =[ 멸(t)t) ]즈(/) = 즈(/) 5-83 Hk( 多(―)) =[~ 〕산·) = 촌,(-) 5-84 와 같은 형태를 갖는다. 이제 개량된 추정값 효k (+) 가 &(+) =으 k+Kki k 5-85 가 된다고 가정하여 관측 자료들과 선형의 관계를 갖도록 하고 이때의 으 k 와 Kk 를 구해보자. 개 량되 기 이 전의 추정 오차는 식 5-68, 5-69 로부터 츠(+) =多(+) ―삼k 5-86 상-) =&(—) _죠k 5-87 와 갇이 주어 진다. 이 경 우 식 5-80, 5-86, 5-87 을 식 5-85 에 대 입하고, 츠 k(+ )에 대해 정리하면 츠 k(+) =으 k+Kkl !:.&쯔~) +Kk!:!.k 다(―) -多(-) 5-88
가 되며, 이때 추정값은 비편향이어야 하므로 추정 오차도 역시 비편향을 만족해야 한다. 죽, E[ 츠k(+)]=O 이므로 이를 식 5-88 에 적용하여 정리하면 으 k =& ( —) —K kfi_ k (]{_k ) 5-89 가 되고, 식 5-85 와 5-86 은 多(+) =홍(―) +Kk[Ik-Jj_k (}{_k)] 5-90 쟌(+) =츠 k 仁) +Kk[ l!:_ k( 설k ) ―Jj_ k(]{_k)]+K 싼 k 5-91 의 관계를 만족한다. 또한, 오차 상호 분산은 식 5-75 에서와 같이 나타나므로 식 5-91 을 식 5-75 에 대 입 하면 pk <+)=Pk(-) +KkE[[!J:.k 맥) -Ek 맥) ][l!:.k ( 츠k ) -Ek (Kk) Y]Kl +E[ 쯔 k (-)[!J:.k ( 잡k ) —Jik ( ]{k) Y]Kl +KkE[[l!:.k (]{k-.i_ k (Xk)]xk (-)Y+KkR, J(l 5-92 의 형태로 나타내어 줄 수 있다. 이 경우 최소 분산은 ]k=E[ 츠,.(+) 쯔 k(+) 기 의값을가질때 急 =O 의 관계를 만족해야 하므로, 결국 K,. = -E[xk ( -) [hk (Xk) -hk (Kk) Y] 5-93 x {E[[l!:.k (Kk) -Jik ( 죠k ) ] [l!:.k ( 죠k ) -Ek 맥) ] 기 + Rk}-1
표 5-3 확장 칼만 필터의 기본 구조 역학 모델 X (t) =J( X( t), (t)) +w( t), Wk~N(O, Q(t)) 관측모델 Zk=Hk(Xk(V 키k~ )N-X(kO +,U -k,R k )k =l , 2, ••• 초기 조건 X(O) ~N( 요, Po) 가정 E[w (t) , vk (t) ] =O for all k and all t 상태 추정값의 전파 X(t) =f(X (t) , t) 오차 상호분산의 전파 P(t) =F( 굿(t), t)P ( t) +P (t )F 지X(t), t) +Q(t) 개량된 상태 백터 Xk(+) =Xi. (-) +Kk[Z i.玉 (Xk(-))] 개량된 오차 상호분산 一 A(+) =— [I-K kH,.(X= k(--)) ]— A (-) 칼만 이득 행렬 Kk=A(-)Hl( 요 (-))[H~Xk(-))A(-) H:(Xk( 一)) +Rk]-•
과 같이 표시된다. 여기서 식 5-93 을 식 5-92 에 대입하여 정리하면 A(+) =A(-) +KkE[[ f!:. k 맥) ―Ji. k 맥] 쵸k (-) 기 5-94 가 된다. 위 식에서 계산의 단순화를 위해 Ek( 참h ) 를 효h (_) 에 대하여 Tayl o r 급수 전개하면 !!:.必) =Ek( 多(―)) +Hk(il k(-) ) 맥훌(-)) + Hk (多 ( —) ) = \:) IX= x.( -) 5-95 와 같이 나타내어지며, 여기서 위 식의 두 항만을 택하여 식 5-90, 5-93 그리고 5-94 에 대입하면 확장 칼만 필터의 개량된 방 정식을 다음과 같이 구해낼 수 있다. 쓰(+) =&(—) +Kk[J k- !!:,k(JI .k( -))] 5-96
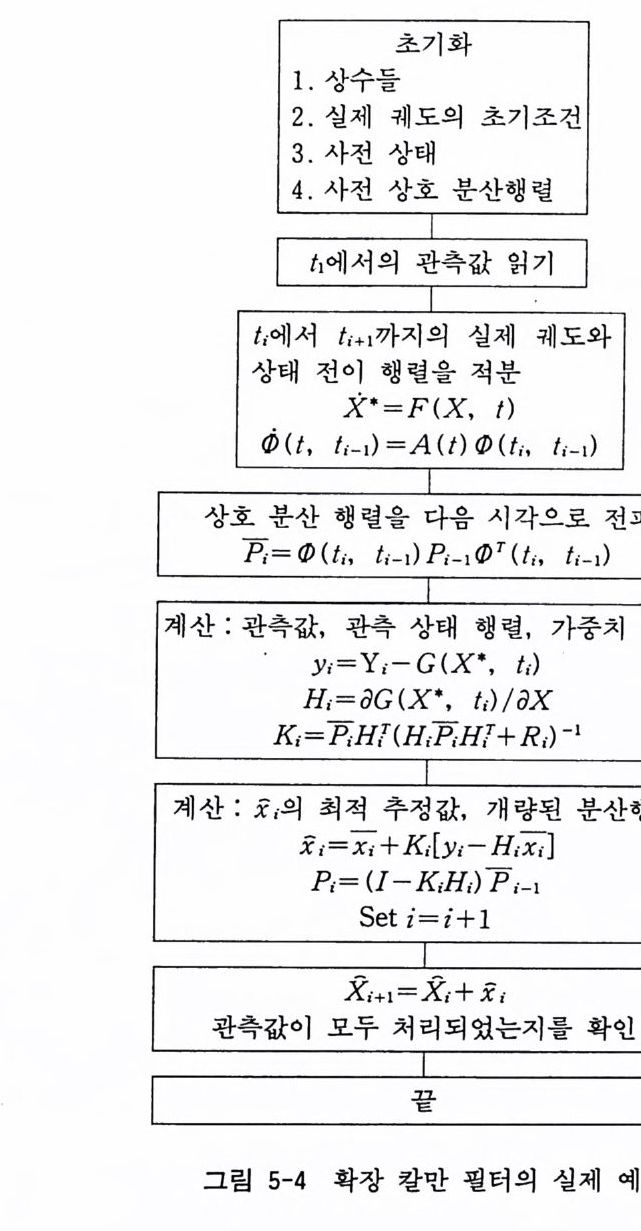 초기화
초기화
Kk=A (-) Hl( 多 (—) ) [Hk (多 (-) ) A (—) Hl( 홍 (-) ) +R 』 -I 5-97 A (+) =[l-KkH1, ( 多 (-) )]A (-) 5-98 이와 같은 확장 칼만 필터를 실제 상황에 적용하기 위한 알고 리즘을 그림 5-4 에 나타내었으며, 확장 칼만 필터의 기본 구조를 표 5-3 에 정리해 보았다. 일반적으로 확장 칼만 필터는 여러 분야에서 많이 사용하고 있 으나, 실제 상황에 적용하는 경우 발산현상이 나타나는 것이 가 장 큰 문제로 지적된다. 이러한 발산 현상은 추정의 정확성을 떨 어뜨리는 가장 큰 요인으로 흔히 다음과 같은 원인들에 의해서 나타난다. i ) 상태 방정식에서의 오차 2k 와 관측 오차 쁘 k 의 상호 분산 행렬 P, R, 상태 진행 잡음 상호 분산 행렬 Q의 구조를 부정확하 게 모델화했거나, 또는 시스템 모델에서 정확히 구현하지 못한 요소들을 사용한 경우 ii) 비선형 운동계를 완벽하게 선형화시키지 못한 경우 iii) 컴퓨터 컴파일러의 성능과 관련된 반올립 오차 효과 이중에서 선형화 과정에 의한 오차는 흔히 Tayl o r 급수 전개 롤 사용할 때 고차항을 제의하기 때문에 생기는 끝자롬 오차에 의해서 발생한다. 또한, 계산 과정에서의 오차는 궤도 결정뿐만 아니라 모든 추정에 있어서 주의해야 할 사항으로, 사용하는 컴 파일러나 수치 적분 방식에 크게 의존하며, 특히 필터링에 있어 서는 사용되는 상태 벡터들의 차원이 크므로 구하는 방법에 따라 서 크게 좌우된다.
5. 2 정지위성 궤도에의 응용 위성의 운동을 기술하는 데 흔히 사용되는 섭동이라는 말은 위 성의 운동에 실제로 영향을 주는 여러 힘들 중 지구의 중력장에 의한 힘을 제의한 다른 힘에 의한 영향을 가리킨다. 이러한 섭동 의 영향에 의해서 위성은 사용자가 정해 놓은 위치에서 벗어나게 되며, 따라서 위성을 일정한 위치에 계속 유지시키기 위한 노력 이 필요하게 된다. 이런 상황에서 소위 허용 범위로 일컬어지는 정해전 지역 내에 위성을 위치하도록 하는 것이 바로 위치 유지 의 목적이다. 위치 유지는 위도나 경도에서 士 0.5° 의 허용 범위를 가지는 것 에서부터 우리나라의 무궁화 위성과 같은 지역 통신위성의 士 0.05° 허용 범위에 이르기까지 그 목적에 따라 각기 다른 위치 유지의 범위를 택하게 된다. 다행히 경도 방향과 위도 방향에 섭 동을 일으키는 원인이 서로 다르므로, 이 절에서는 동서 방향 위 치 유지와 남북 방향 위치 유지의 두 가지로 나누어 생각해 보도 록 하겠다. 5.2.l 동서 방향 위치 유지 섭동에 의한 위성의 위치 이동 중 위성의 경도가 바뀌는 것을 보정해 주는 것이 바로 동서 방향 위치 유지이다. 이와 같이 위 성을 동서 방향으로 움직이게 하는 섭동력의 원인에는 크게 두 가지가 있는데, 그 중 지구가 완전한 구형이 아니라 적도 방향으 로 찌그러진 타원체의 모습을 하고 있다는 것이 가장 큰 원인으 로 작용하며, 그 밖에 위성에 미치는 태양의 복사압도 커다란 영 향을 주고 있다.
5. 2. 1. 1 3 축 지 구 모형 지구의 모형을 정확히 만들려면 지구의 적도 단면이 타원이라 는 사실과 지구의 편평률이 고려되어야만 한다. 죽, 지구는 세 축의 길이가 모두 다른 타원체의 모습을 가지고 있으며, 따라서 지구에 의한 중력장은 단순한 모양이 아니고 여러 고차항으로 전 개된 급수의 형식으로 기술된다. 다행히 위성의 고도가 높아지면 중력 고차항의 영향이 급속히 줄어들어 지구 동주기 위성의 경우 뇨 이상의 항들은 거의 영향을 주지 못하게 된다. 지구의 3 축성 에 의한 영향은 그립 5-5 에 보인 대로 위성의 궤도 상에 횡방향 가속도로 나타난다. 지구 동주기 위성의 경우 지구의 자전과 위 성의 공전이 거의 일치하므로 위성의 경도는 거의 변화하지 않거 나, 변화하더라도 아주 느리게 변화하게 된다. 이럴 경우의 섭동
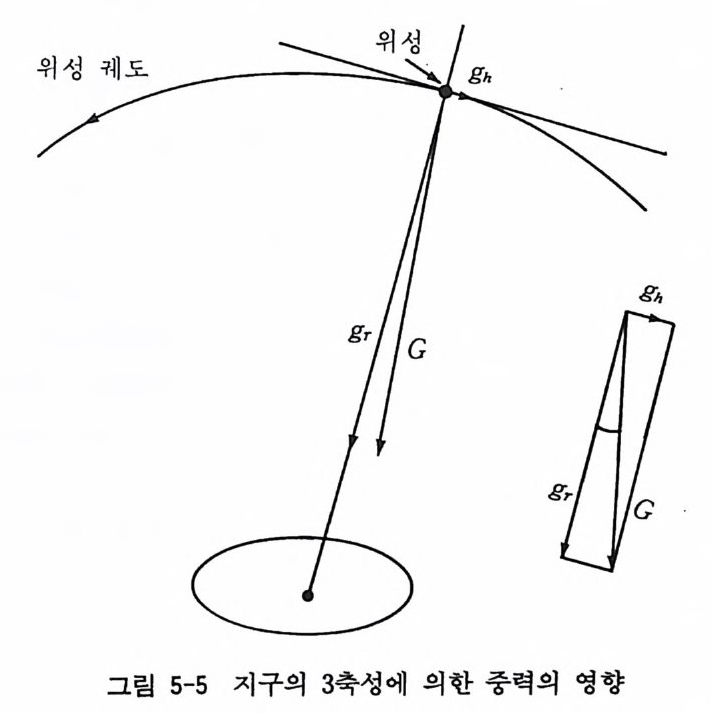 그림 5-5 지구의 3 축성에 의한 중력의 영향
그림 5-5 지구의 3 축성에 의한 중력의 영향
 2
2
울 혼히 공명 효과라고 하며, 이때의 횡방향 가속도는 거의 상수 형태를 갖는다. 그림 5-6 에는 횡방향 가속도를 연간 속도 변화량으로 표시하 고, 이때의 경도에 따른 섭동량의 변화를 보였다. 이 그립에서 한 곡선은 지구의 3 축성에 의한 효과를 나타내고, 다른 한 곡선 은 모든 중력장의 급수항을 합천 효과를 나타내고 있다. 여기서 S1 과 S2 로 나타낸 곳은 중력 골짜기로서 안정된 지점의 경도이 고, U1 과 냐는 불안정한 지점을 나타낸다. 일반적으로 위성이 어떤 경도에 있을 때 오랜 기간 의도적으로 조종되지 않는다면, 위성은 횡방향 가속도의 영향을 받아 시간이 흐르면서 점차 중력 골짜기로 흘러들어가게 된다. 그림 5-6 에서 볼 수 있듯이 일반적으로 동경 75° 와 서경 105.5° 의 적도 상공 정지궤도는 안정한 영역이고, 서경 19 . 5° 와 동경 161.8° 의 적도 상공 정지궤도는 불안정 영역이 된다. 이러 한 정지궤도에 존재하는 위성은 앞에서 설명한 바와 갇이 안정
영역으로 표류 이동을 하려는 경향을 보인다. 이해를 돕기 위해 서 그립 5-7 에 횡방향 가속도에 의한 위성의 위치 변화 형태를 나타내었다. 여기서 보면 경도 -l 1 에 있던 위성은 운동 방향과 반 대 방향의 횡방향 가속도의 영향을 받아 공전 속도가 점점 느려 진다. 이 경우 위성의 고도가 낮아지고 공전 주기는 짧아져서 지 상의 관측자에게는 마치 위성이 동쪽으로 흘러가는 것처럼 보이 게 된다. 위성이 안정점인 A2 에 도달하면 중력의 수평 성분이 없 어지므로 횡방향 가속도는 0( 죽, 섭동이 0) 이 된다. 이 지점을 지 나면 횡방향 가속도는 이전과는 반대 방향으로 작용하게 되며, 동쪽을 향한 위성의 표류율은 감소하여 A3 에 도달하면 위성의 표 류 운동은 일단 정지된다. A3 의 위치에서 정지한 위성은 횡방향 가속도의 영향을 계속 받아 다시 서쪽으로 흘러가게 되고, 결국 에는 '1 1 의 위치로 되돌아오게 된다. 이러한 운동의 주기는 보통
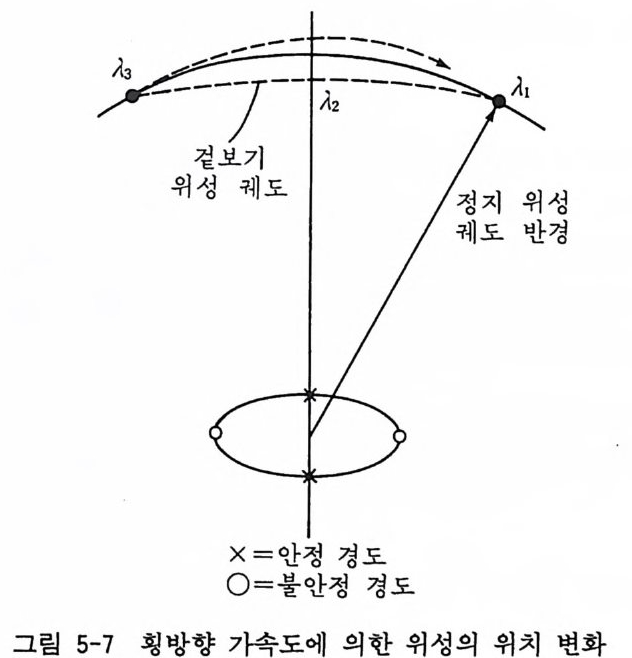 A3 三
A3 三
800 일 정도가 소요된다. A2 의 경도는 지구 적도면 타원의 단축 위이고, 그림 5-6 에서 S1, s2 로 나타내어졌으며, 반면에 U1 과 냐는 타원의 장축 상에 존재한다• 이와 같은 이유로 지구의 3 축성에 의한 섭동을 보정하지 않는 다면, 위성은 우리가 필요로 하는 지점에 계속 존재할 수 없게 된다• 그러므로 우리가 원하는 위치에 계속 위성을 유지시키려면 위성에 대한 주기적인 조작이 필요하다. 이제 역학적으로 위성의 경도 A 가 어떻게 변하는지를 방정식 으로 표현해 보도록 하자. 지구 정지궤도의 경우에 횡방향 가속 도 S' 보다는 동경 방향의 중력 가속도 gr0 l 훨씬 크게 나타나므 로, 이들 사이에는 —SgT' ~1 의 관계가 성립한다. 위성의 겉보기 가속도 (경도의 표류 가속도) 는 —ddDt = d (nd— t n EB) =-—3a S ' 5-99 이고, 여기서 nEB 는 지구의 자전 각속도이다. 위성의 겉보기 가 속도가 지구의 3 축성에 의한 중력 섭동 (A.) 이라면 A는 다음과 같 은 식으로 표현할 수 있다. A°= [0 .14 sin ( L 。 -171°) + 2 . 98 sin 2 (L 。 + 15 . 0°) + 0 . 42 sin 3 (L 。 -21.1°) + 0 . 04 sin 2L0] x 10-5 rad/day 2 5-100 여기서 Lo 는 위성이 놓일 공칭 경도이고, Lo 는 태양의 적경이 다.
A가 상수이므로 A를 적분하면 우리가 원하는 방정식을 얻을 수 있다. A=A 。 +A. t A= -A 。 +A 。t +—A2· t 2 5-101 여기서 Ao 는 위성의 위치 보존을 위한 허용 범위이고, A 는 위성 의 표류율, Ao 는 표류율의 초기값이다. 위의 식을 이용해 위성을 미리 계획된 허용 범위 내에 위치시 키는 작업을 수행할 수 있으며, 실제 수행시 조작 횟수의 최소화 가 중요하게 고려되어야 한다. 위성을 처음에 허용 범위의 한쪽 끝에 놓고, 다른 한쪽 끝에 위성이 도달할 때 관측되는 위성의 가속도가 0 이 되도록 초기에
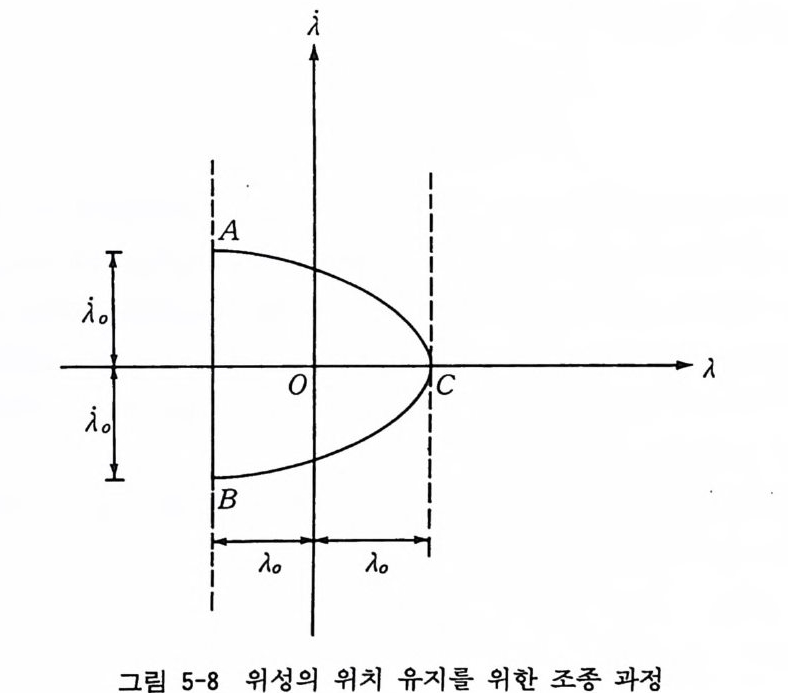 A
A
설정을 해주면, 위성이 다른 한쪽 끝에 도달하는 경우 이 위성은 허용 범위의 중심을 향해서 움직이게 된다. 죽, 위성이 허용 범 위의 중심(공칭 경도)을 지나 처음 출발했던 곳으로 흘러가는데, 이때 지상에서 임의로 조종하여 위의 과정을 되풀이하게 한다. 이런 방법을 쓰면 최소한의 조종 횟수로 위성의 위치 유지를 할 수있다. 이 과정이 그림 5-8 에 나타나 있다. 이 그립을 보면, A 지점에서 초기 표류율 Ao 를 가지고 있던 위 성이 C 에 도달하면 표류율은 0 이 되고 위성은 B 로 흘러가게 된 다. 위성이 B 에 도달하면 지상에서 조종을 해서 표류율 ― Ao 에 서 +Ao 로 바꾸어 주어 다시 A 지점에서 시작하는 방법인데 이러 한 되풀이 과정을 하여 위성을 일정한 위치 내에 유지하도록 할 수있다. 이 경우 A 지점에서 C 로 갔다가 다시 A 로 돌아오는 한 주기에 소요되는 시간은 순환주기 =4 ✓ 곱 5-102 의 형태로 주어진다. 이때 알아 둘 것은 위치 유지를 할 때 위성 의 위치를 조종하는 것이 아니고 표류율을 조종한다는 것이다. 다시 말해서 표류율을 2A0 만큼 바꾸는 것은 궤도 장반경의 변화 와 같다. 만약 이심률은 고정시킨 채 장축의 길이만을 바꾸려면 궤도 상에서 180° 떨어전 곳에서 최소한 두 번의 추전이 필요하 다. 이십률이 아주 작은 정지위성에 대한 장반경의 섭동 방정식 4-78 은 d= 꼬rn S'= 요n s
이므로 식 5-99 를 위 식에 대입하면 4a= 오3 으n (-LID) 5-103 이고, 여기서 4D=2A 。 =-4 JJTa711]이다. 궤도 조정에 필요한 횡방향 속도 증분 (Vs) 은 식 5-99 를 시간 에 관해 적분하면 얻을 수 있다. 4Vs=- 으3 4D 5-104 우리나라 최초의 방송 통신위성인 무궁화 위성의 경우에 적용 하여 보자. 정지궤도 위치는 Lo=ll6°E 이므로 i= -0.0 0 2°/day 2 (L 0 =0° 인 경우)이고, 위치 허용 범위는 tl o=0.05° 이므로 Ao= 0 . 002°/day , LJD = 0 . 04°/day , L1 Vs = 0 .11 4 m/s 가 되 고, 동서 방 향의 위치 유지는 20 일에 한 번씩 하여야 한다. 5. 2. 1. 2 태 양 복사압 위성에 작용하는 동서 방향 섭동력의 원인 중 또다론 하나는 바로 태양의 복사압에 의한 영향이다. 일반적으로 위성이 태양을 향하고 있을 때는 태양의 복사암울 크게 받아 위성이 뒤로 밀리 게 된다. 이것에 의한 가장 큰 영향은 궤도 이심률의 주기적인 변화이며, 이때 장축의 길이는 변화하지 않는다. 그림 5-9 를 보면 원래 원 궤도이던 것이 태양의 복사압을 받아 이심률을 가전 궤도로 바뀌는 것을 알 수 있다. 원 궤도의 1 지점 에서 복사암에 의해 생긴 4V 는 위성의 고도를 증가시키는 역할 울 하고 2 지점의 4V 는 고도를 낮추는 역할을 한다. 이러한 이 유에 의해서 궤도의 장축은 변화하지 않고, 이심률만이 바뀌게
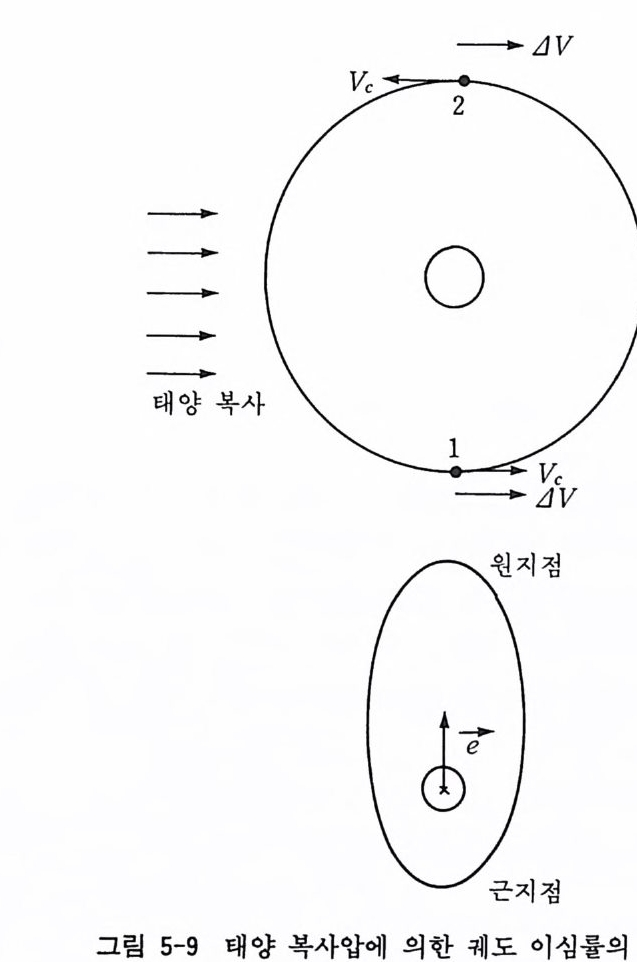 ► L1 V
► L1 V
되며, 이 경우 태양의 위치가 바뀌면 궤도 장축도 태양을 직각으 로 바라보도록 같이 이동을 하게 된다. 이제 위성이 태양 복사압에 의해 받게 되는 영향에 대해서 생 각해 보도록 하자. 위성이 태양 복사압에 의해 일정한 가속도 F 를 받고, 그 영향으로 생기는 이심률이 아주 작다고 가정할 때, 이심률의 시간에 따른 변화는 다음과 같은 식으로 표현할 수 있 다• 식 4-79 로부터
齋=止 ~[s i~ n —InI1 aI R ( .s'+i n ( c IoI sIR .E' + +2c ocoss 1111 )§§'' ]) 의 관계가 성립하며, 그립 5-10 으로부터 태양 복사압에 대한 벡 터 성분은 0F== c—ossin I I III RIR'+'+scino s11 1§1 §' ' §'=Fsin 11 가되므로 —ddet =—n1a (2F— sin 1.1 §') =—V1e (2F— sin 1.1 §') =-fV1;e - (2 F— F sin 2 1.1) 5-105
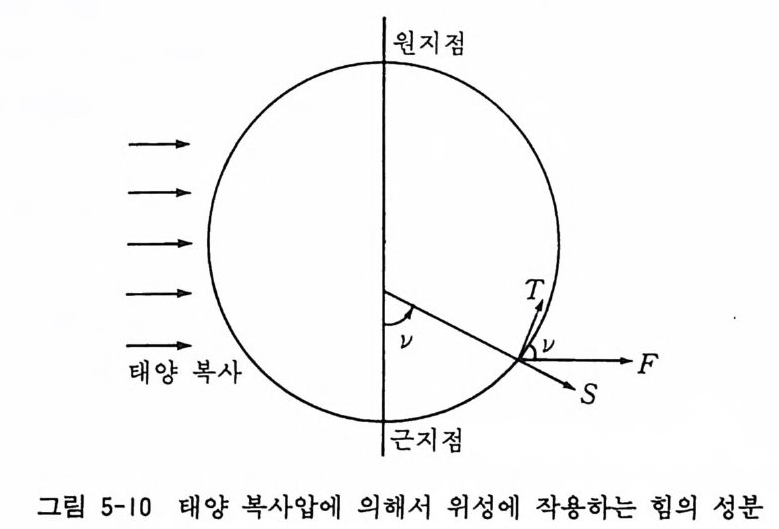 원지접
원지접
와 같이 나타낼 수 있다. 여기서, F=K( ~1 1'ls a기 t I (\ ¥t )=I K(\ 쇼m s 기a t 5-1 0 6 K= 전반사 평면에 대한 태양의 복사압 =9.1 X 10 -5 N / m 2 A eJf =태양을 향한 위성의 단면적 1 1Zs a t=위성의 질량 R= 표면 반사율 Ve= 원 궤도 속도 의 값을 나타낸다. 이때, 식 5-105 를 시간에 대해 적분하면 우리는 원하는 기간 동안의 이심률의 변화율을 4e =—32 —VFe ( pe r day ) 5-1 0 7 와 갇은 형태로 얻어낼 수 있다. 이 식에서 4 e 의 방향은 항상 태양의 방향과 직각을 유지한다. 식 5-107 의 경우 만약 지상의 조종이 없다면 이심률의 변화는 4e 벡터가 1 년 동안 원을 그리도록 일어날 것이다. 이 원을 혼 히 이심률 벡터 원이라고 하며, 이 원의 반경 p는 다음과 같은 식으로 나타난다. p= 36~251C.2 5e . =O. 02 23(Ae ffIm sa,) 5-108 위 식에서 초기의 이심률이 P 이고 , 근지점이 태양을 향하고 있 다고 가정하면 이때의 궤도 이심률은 항상 P 로 일정하게 유지될 것이다. 일반적으로 지구 동주기 위성의 이심률이 0 이 아닐 경우, 이
위성은 칭동이라고 하는 주기적인 경도 이동을 하게 되며, 이때 칭동의 전폭은 2e 라디안이 된다. 이러한 칭동 현상 때문에 위성의 허용 범위를 구상할 때 칭동 에 영향을 받는 부분을 반드시 고려해야 하며, 보통 궤도가 최대 의 이심률을 가질 때 이 위성은 최대의 칭동 전폭을 나타낸다. 이처럼 위성의 궤도 이심률이 클수록 칭동의 전폭이 커지므로, 위성의 목적상 허용될 수 있는 이심률의 범위가 2P 보다 크거나 같다면 지상에서 의도적인 조종을 할 필요는 없으며, 이심률이 P 보다 작은 경우에 대해서만 조종이 필요하다. 인공위성이 받는 태양 복사압에 의한 섭동을 보정하는 경우, 지구 타원체의 3 축성에 의한 섭동의 보정 때와 마찬가지로 최소 한의 조작 횟수가 위치 유지 계획을 수립하는 데 중요한 조건이 되며, 보통 다음과 같은 방법으로 최소 조작 횟수를 얻을 수 있다. 처음에 위성이 최대의 이심률을 가지게 하고, 근지점을 태양 반대편에 위치시키면 이때의 태양 복사압은 이심률을 줄이는 섭 동으로 작용하게 된다. 이 경우 이심률이 특정한 최소값까지 감 소하면 다시 늘어나기 시작하여 결국은 처음의 최대값이 될 때까 지 증가한다. 이러한 과정을 거치는 동안 장축은 처음의 위치와는 다른 곳에 있게 되는데, 인위적인 조작으로 장축을 처음과 같이 태양 반대 편의 근지점에 오도록 해주면 위의 과정을 되풀이하게 되어 위성 의 위치 유지가 이루어진다. 죽 이심률을 바꾸는 것이 아니라 장 축의 위치만을 바꾸어 줌으로써 위치 유지를 하는 것이다. 위치 유지를 위한 조작과 다음 조작 사이의 시간은
순환 주기 =le=~s i n-1 (f)(yea rs) 5-109 이다. 이와 갇이 궤도 장축을 최적 조건으로 이동시키려면, 그립 5-11 에 나타나 있는 것과 같은 과정을 밟아야 한다. 일반적으로 보정 전의 궤도에서 한 번 분사를 해주고 보정 후의 궤도에서 다 시 한 번 분사를 하는데, 만약 칭동의 중심을 공칭 경도에 위치 시키려면 분사를 대칭으로 해주어야 한다. 그립 5-11 에서 전체 속도변화는 LI V = Vcet sin L1 (J)。 5-110 이다. 여기서 e t은 허용되는 최대의 이심률을 의미한다. 이제 식 5-110 에서 나타난 4V 를 최소화시키는 방법에 대해서 생각해 보자. 4V 를 최소화하려면 일반적으로 조작 횟수가 늘어 나게 되는데, 이 둘을 모두 최소화하기 위해서는 근지점을 거의 태양 쪽을 향하게 한 후 여러 번 조작해 주어야 한다.
 허용 오차 원
허용 오차 원
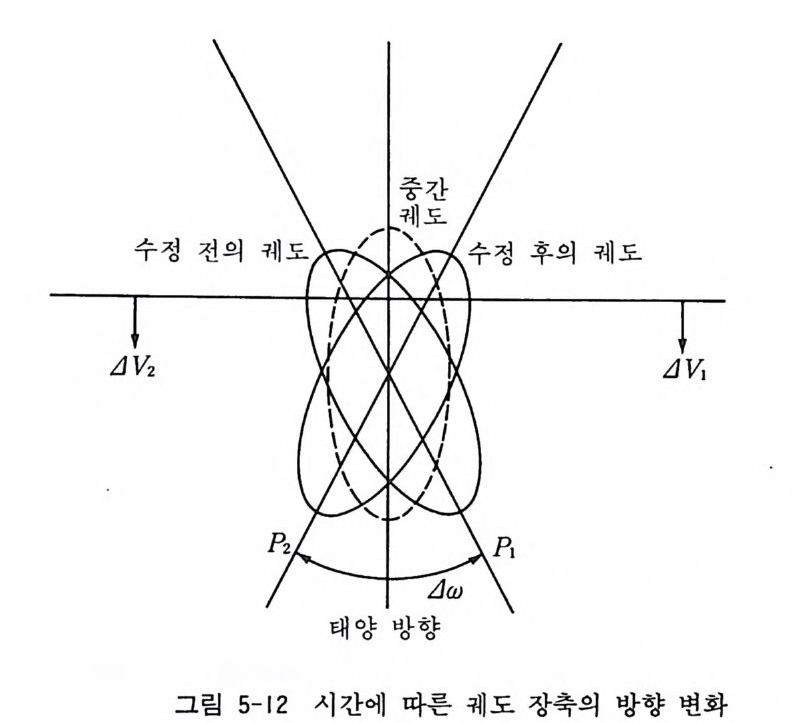 蠶/
蠶/
그립 5-12 을 보면 처음 태 양에 4 (J) 0 만큼 뒤 처 져 있던 장축이 순환 주기인 t C 만큼 지난 후에는 4 (J) 0 만큼 앞서 있게 된다. 따라 서 , tc 의 시 간이 경 과한 뒤 24 (J) 0 만큼 장축을 이동시 키는 조작을 해주어야만 인공위성을 일정한 위치에 계속 유지시킬 수 있다. 실제 동주기 위성일 경우 e t는 매우 작은 값을 가지므로 보통 태 양시로 오전 6 시와 오후 6 시에 조작을 해준다. 5.2.1. 3 궤도 조정 계획 3 축성과 태양 복사압에 의한 섭동의 보정은 모두 횡방향의 가 속도를 필요로 한다. 3 축성에 의한 섭동의 보정은 궤도의 어느 곳에서나 가능하지만 태양 복사압에 의한 섭동의 보정은 궤도의 특정한 곳에서만 할 수 있기 때문에, 이 두 가지 조작을 조합해
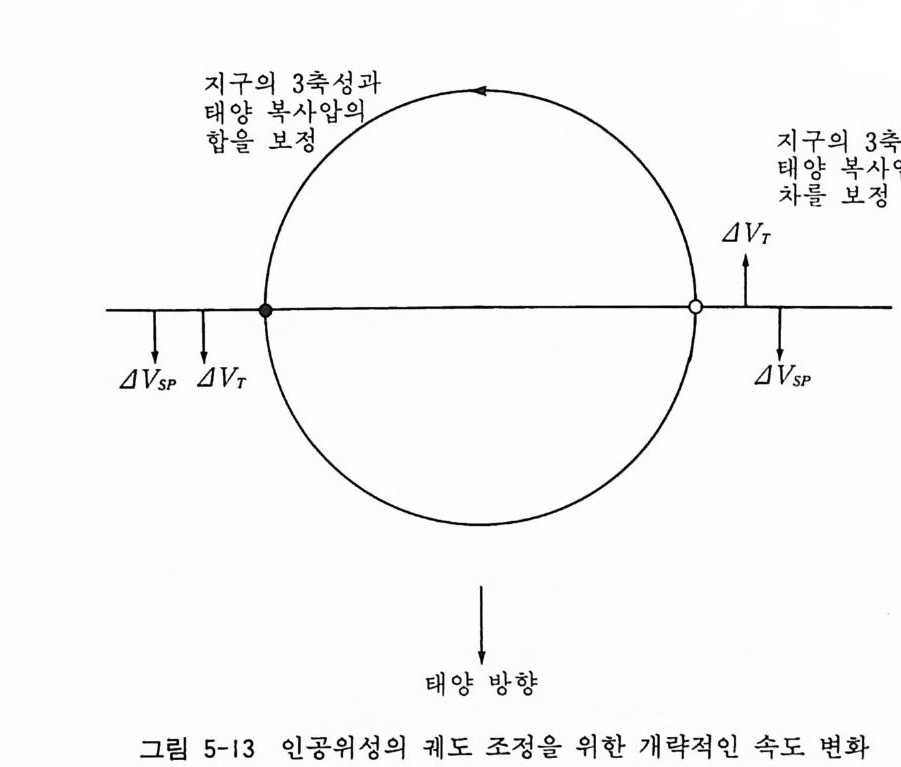 지구의 3 축성과
지구의 3 축성과
서 행하는 경우 반드시 이룰 고려해 주어야 한다. 3 축성 조작을 해줄 때 필요한 4V 의 양이 2T 이고 태양 복사 압 보정을 해줄 때 필요한 양은 2P 이므로, 이 두 조작을 같이 행하기 위해서는 그림 5-13 처럼 궤도의 한쪽에서 (T+P) 만큼 조작해 주고 다른 한쪽에서는 (T - P) 만큼 조작해 주어야 한다. 이 경우 만약 T>P 라면 V 의 전체 조작량은 2T 가 될 것이고, 반대로 P> T 라면 4V 는 2P 가 될 것이다. 이러한 방법은 캐나 다의 Telesat 위성이나 유럽 통신위성인 ECS, MARECS 등에서 사용되며, 그림 5-13 에 그 대략적인 양상이 설명되어 있다. 이 방법은 ® 추전 횟수가 적고 충분한 정밀도를 얻울 수 있다. ® 지상국의 업무가 적은 편이다.
® 추진 전후에 적절한 시간 여유가 있다. 는 장점을 가지고 있지만, 반면에 개념적으로는 매우 복잡해서 위성의 이동률과 이심률 벡터의 변화가 동시에 이루어지도록 추 진 세기나 추전 위치를 정해주어야 한다는 단점도 가지고 있다. 이러한 경우 일반적으로 추진 세기는 3 축성 효과를 보정하고, 추 진 시기는 이심률을 보정해 주는 역할을 한다. 만약 궤도의 근지 점이 가능한 한 태양 방향의 근방에 있고 이심률이 적절히 주어 진다면 이 방법에 의한 위치 유지도 유용하게 사용될 수 있다. 그러나 이 방법은 태양 복사압의 영향이 작다는 가정에서 적용되 기 때문에 앞으로의 위성 시스템에서는 적절치 못할 것으로 예측 된다. 5. 2. 1. 4 오차 분석 우리는 지금까지 인공위성의 동서 방향 위치 유지에 대해서 알 아보았다. 이러한 위치 유지에는 앞에서 살펴본 것과 갇은 여러 방법이 사용되며, 이 과정 동안 여러 이유에 의해 오차가 발생하 게 된다. 이들 중 실행 오차, 추적 오차, 이론적 모델의 오차 등 의 세 가지가 위치 유지에 가장 큰 영향을 주기 때문에 이 절에 서는 이들 세 가지를 위주로 위성의 위치 유지 과정에서 나타나 는 오차에 대해 보다 자세히 알아보도록 하겠다. i ) 실행 오차 위치 유지의 실행시 일어날 수 있는 오차는 일반적으로 추진 력, 추전 방향이 처음에 계획했던 것과는 다르게 나타날 때 많이 발생한다. 일반적으로 추진력의 오차는 편향되어 나타날 수도 있고 무작
위로 나타날 수도 있다. 전자의 경우는 몇 번의 조작 후에 관측 을 통해 그 양을 알아내어 다음의 조작시 비교적 쉽게 보정할 수 있으나, 불규칙한 무작위 오차일 경우는 보정하기가 쉽지 않아 가능하면 허용 범위 내에 위성이 위치할 수 있는 크기 정도만 발 생하도록 조작해 주어야 한다. 추전 방향의 오차는 보통 추전기의 탑재가 잘못되었거나 , 또 는 위성의 지향 방향이나 자세 조종에 오차가 있는 경우에 많이 발 생한다. 일반적으로 추진기의 탑재가 잘못된 경우는 편향된 오차 가 발생하므로 나중에 보정할 수 있지만 , 다른 경우의 오차들은 편향성과 불규칙성을 모두 가지기 때문에 보정하기가 쉽지 않다. 그러나 위성의 자세가 어느 정도 정확히 결정되면 이때 발생하는 오차는 99. 9 %의 정밀도로 측정할 때 0.5 ° 내의인 것으로 밝혀 져 있어 현재의 기술로는 그리 치명적인 오차가 되지는 않는다. 이 밖에 동서 방향 위치 유지와 남북 방향 위치 유지에 두 가 지 보정을 한꺼번에 해줄 때 중복 오차가 발생하는 경우도 있는 데, 이러한 중복 오차는 실행 오차의 발생에 커다란 영향을 미 친다. ii) 추적 오차 위성의 위치나 궤도 요소의 예측이 잘못되는 경우 이것이 위성 의 위치 유지에 치명적 오차로 작용할 수 있다. 일반적으로 위성의 경도를 찰못 알았을 경우 위성의 조작 시기 를 잘못 산출하게 되어 위성이 허용 범위 바깥으로 밀려나가는 현상이 발생하게 된다. 또, 위성 궤도의 장축 길이를 찰못 알았 울 경우에는 조작 계획에 영향을 주어 위성의 이동률에 오차롤 발생시키며, 이심률과 근지점 위치에서의 오차는 조작 계획과 조 작시기 모두에 영향을 끼쳐서 위성의 칭동과 조작 주기를 교란할
수 있다. 참고로 10°E 에서 위도 경도 방향의 허용 범위가 土 0.1° 인 ECS 위성의 경우 궤도 요소의 허용 오차 범위는 다음과 같이 주 어전다. 경도의 허용 오차 범위 <0 .0065°. 장축 길이의 허용 오차 범위 <0.07km 이심률 오차의 허용 범위 <2 % 근지점 위치의 허용 오차 범위 <1° 평균 근점 이각의 허용 오차 범위 <2° iii) 모델 오차 앞에서 살펴본 오차들 의에도 지구 중력장 모델을 세울 때 고 차항들을 무시하는 경우에 발생하는 오차가 있다. 이러한 모델 오차는 앞의 두 가지 오차들보다는 그 크기가 매우 작지만 필요 에 따라서는 이 오차의 영향도 계산해 주어야 한다. 실제의 경우에 있어서 우리에게 나타나는 오치는· 이런 여러 원 인에 의한 것들이 합쳐진 형태이며, 따라서 우리가 허용 범위를 계획할 때도 여러 원인에 의한 오차들을 모두 고려해 주어야 한 다. 일반적으로 우리가 고려해야 되는 기본적인 오차들은 다음과 같다. ® 2 차 이상 고차항의 무시에서 오는 오차 : 허용 범위의 양 끝에 0 . 0075° 의 폭을 할당해서 오차를 수용한다. ® 다른 천체의 섭동에 의한 경도 오차 : 달에 의한 오차를 수용 하기 위해 0.0025°, 달의 14 일 주기의 섭동에 의한 영향을 포
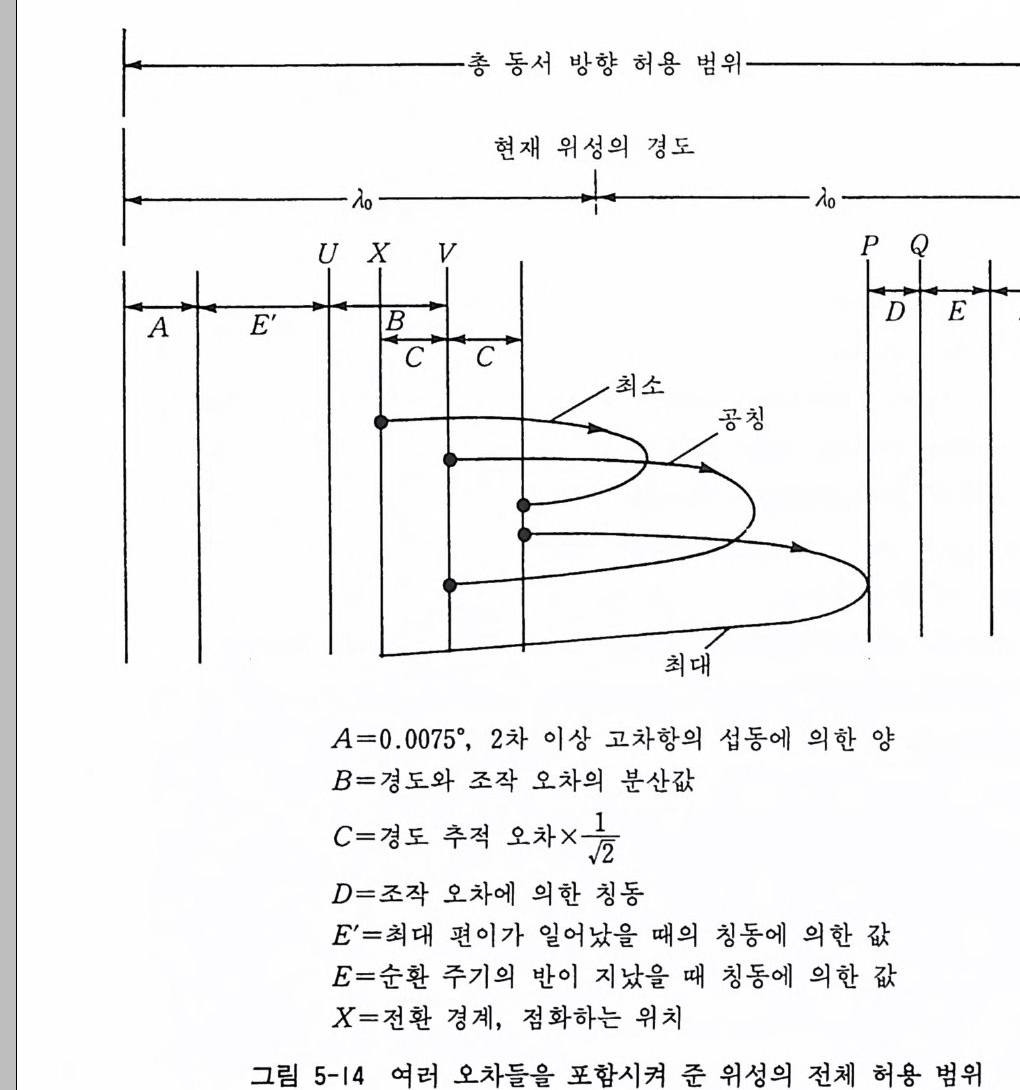 二 A 。x v 총 동서 방향 허용 범위 p Q
二 A 。x v 총 동서 방향 허용 범위 p Q
함하기 위해 0.005° 의 여유 공간을 하루에 2 회씩 할당해 준다. ® 이심률에 의한 칭동 : 칭동에 의한 동서 방향 변위를 포함해서 허용 범위를 계획해야 한다. ® 실행 오차 : 실행 오차도 허용 범위를 설정할 때 고려해야 한 다.
지금까지 여러 원인으로 발생하는 오차들에 대해서 알아보았으 며, 이들을 허용 범위 내에 포함시켜 준 형태를 그림 5-14 에 나 타내었다. 5.2.2 남북 방향 위치 유지 우리는 앞 절에서 인공위성의 동서 방향 위치 유지의 방법과 그때 발생하는 오차들에 대해서 알아보았다. 그러나 인공위성에 작용하는 섭동에는 동서 방향의 요소만이 있는 것은 아니며 , 남 북 방향의 섭동 역시 인공위성의 운동에 커다란 영향을 미친다. 이러한 남북 방향의 섭동 원인과 이에 따른 위성의 위치 유지에 대해 이 절에서 살펴보도록 하겠다. 남북 방향 위치 유지는 위성의 위도 변화를 보정해 주는 것을 그 목적으로 한다. 일반적으로 위성의 위도를 변화시키는 섭동의 원인에는 달과 태양의 인력이 가장 커다란 작용을 하며, 이들의 영향은 위성의 궤도면 자체를 이동시켜 궤도 경사각과 승교점의 방위각을 변화시킨다. 물론 이심률이나 장축의 이동 등에 끼치는 영향도 있지만 이는 매우 미미하기 때문에 여기에서는 고려하지 않도록 하겠다. 5.2.2.1 물리적 원리 그림 5-15 에 지구의 편평률과 달과 태양의 섭동에 의한 궤도 극축의 이동이 나타나 있다. 여기서 원 A 는 편평률, 원 B 는 달 과 태양의 섭동에 의해 나타나는 궤도 극축의 이동 경로롤 의미 한다. 일반적인 경우에 이 두 효과가 동시에 작용하므로 결과적 으로 궤도 극축은 원 C 를 그리며 이동하게 된다. 그립을 보면 알 수 있듯이 편평률에 의한 섭동과 달과 태양에
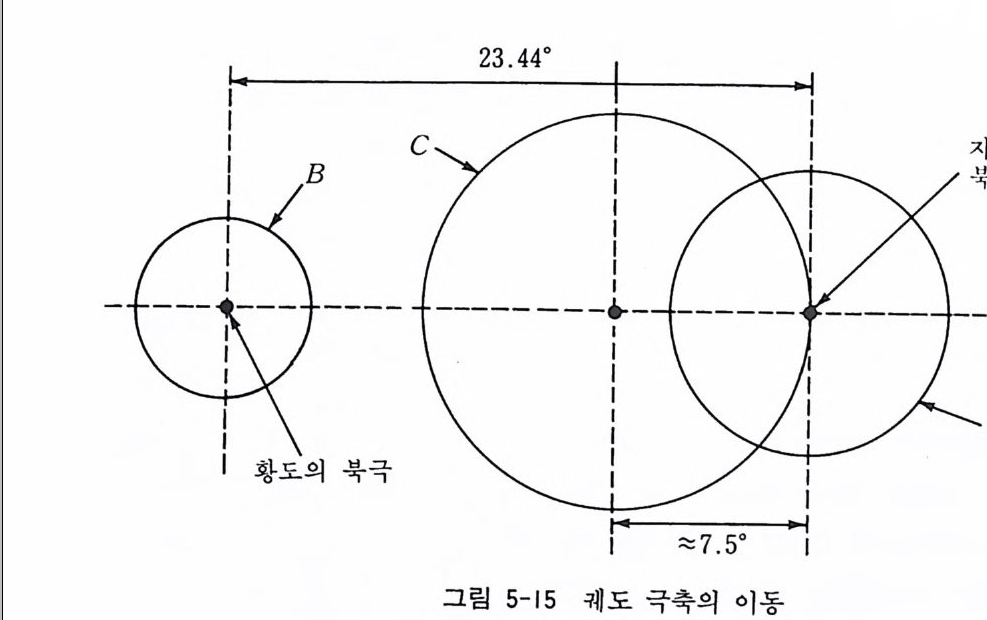 23. 44 °
23. 44 °
의한 섭동은 비슷한 양상울 보이므로 편평률을 연구해서 달과 태 양의 섭동의 성질을 유추해 볼 수 있다. 지구 동주기 위성일 경우 원 C 의 중심은 지구 북극과 7.5° 떨 어져 있다. 따라서 지구 정지 적도 궤도에 아무런 추가 조작이 없다면 궤도 경사각은 27.5 년이 지난 후 15° 까지 증가했다가 55 년 후 다시 oo 가 된다. 5.2.2.2 궤도 역학 달과 태양의 섭동은 지구와 섭동을 받는 위성, 섭동을 주는 태 양, 달 간의 역학적 문제이다. 지구와 위성 간의 거리에 비해 섭 동을 주는 물체의 거리가 멀기 때문에 달과 태양의 섭동에 의한 궤도 극축의 이동률은 다음과 같이 나타낼 수 있다. 4p =召仁)(~)3 a3n(1+2e 나… )cos rsin r 5-111
여기서 각각의 변수들은 ms at , me : 위성과 지구의 질량 r, Re : 위성의 거리, 지구 반경 a : 지구 반경 단위로 나타낸 장축의 길이 r: 궤도 극축과 섭동체 간의 각도 롤 나타낸다. 이때 만약 위성이 원 궤도를 그리며 운동한다면 식 5-111 은 단 순화하여 Llp = km,sn cos r sin r 5-112 의 형태로 나타낼 수 있으며, 이 경우 km,s= 召 ~)(~)3a3 의 값을 갖는다. 여기서, 아래 첨자 m, s 는 각각 달과 태양의 물리량임을 나타낸다. 식 5-112 에 의해 계산된 각각의 이동률은 L1Pm =3 . 725 cos rm sin rm (0/ye ar) L1Ps = l. 475 cos rs sin rs (0/ye ar) 가 되며, 이것을 보정해 주기 위해서 우리는 인위적인 조작으로 위성에 4V 만큼의 속도를 더해 주어야 한다. 따라서 이동률을 속도 단위로 표시하면 L1 Vm = 175 . 76 cos rm sin rm (m/s) /yea r 5-113 L1 Vs = 79 .l6 cos rs sin rs (m/s) /ye ar 5-114 의 형태로 표시할 수 있다. 그립 5-16 에 극축의 이동률 4V 와
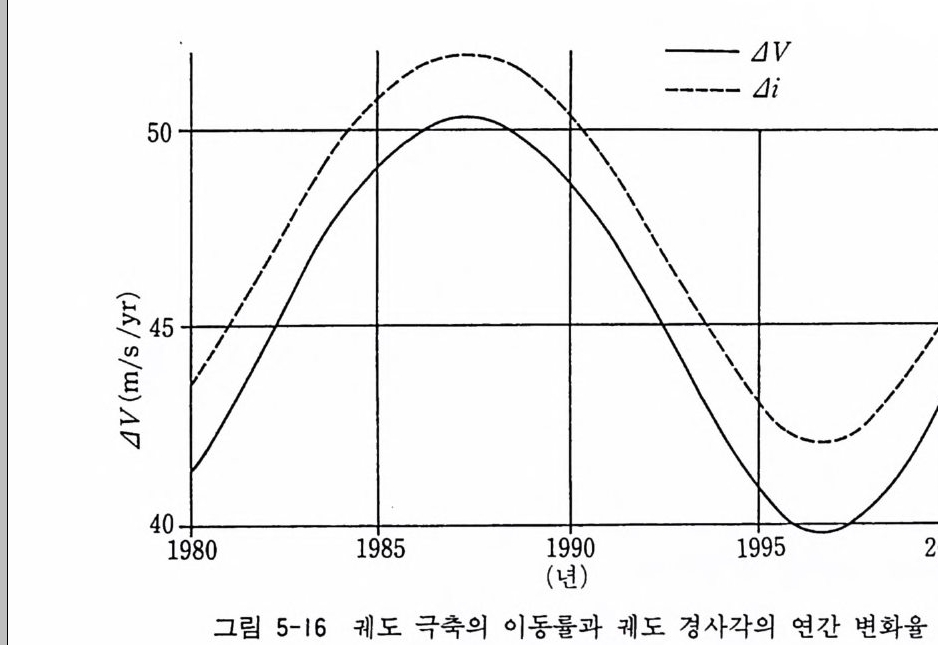 50 /,,/- ----\ \ \ -----44 Vl. 0.9
50 /,,/- ----\ \ \ -----44 Vl. 0.9
궤도 경사각의 변화량 Ll i의 연간 변화가 나타나 있다. 참고로 달 궤도면과 지구 적도면이 이루는 각이 변하는 주기는 18.6 년이 고, 최대값 28.58° 인 1969 년과 최소값 18 . 31° 인 1978 년의 4V 값 들을 다음에 보였다. 1969 년 1978 년 L1 Vsun 14 . 45 14 . 45 (Q단위 ; m/s/ye a r) L1 Vmoon 36 . 93 26 . 35 L1 Viota l 51. 38 40 . 80 5.2.2.3 조작 계획 및 오차 분석 일반적으로 위성에 주어지는 위도 방향 허용 범위는 土 0.1° 정 도인데 이런 정도로 위치 유지를 해주기 위해서는 달과 태양의 섭동이 적은 양으로 반영되도록 하는 조작이 반드시 필요하다.
보통 조작 시기는 하루중 가장 적당한 시간이 택해지며, 이때 적 당한 시간이란 지구 중심과 위성이 이루는 직선이 궤도 국축을 이동시키려는 방향과 칙각을 이룰 때를 의미한다. 보통 위성의 궤도 극축은 춘분점 쪽으로 이동하려고 하는 성질이 있으므로 적 절한 조작 위치는 흔히 춘분점으로부터 90° 와 270° 떨어진 지점 이 많이 택하여진다. 일반적으로 동서 방향 위치 유지보다는 남북 방향 위치 유지에 필요한 4V 가 훨씬 크기 때문에 남북 방향 위치 유지시 발생하 는 추진 방향의 오차는 동서 방향 위치 유지에 무시할 수 없는 오차를 파생시키게 된다. 그러므로 남북 방향 위치 유지는 동서 방향 위치 유지의 순환 과정이 모두 끝나기 전에 이루어져야 발 생하는 오차를 보정해 줄 여유가 있게 된다. 남북 방향 위치 유지의 예로는 ESA 의 OLYMPUS 계획이 대 표적이다. 이 방법의 목적은 초거 궤도 극축을 조작 초기와 조작 말기의 궤도 경사각이 같도록 잡아주는 것이다. 이 방법을 사용 하면 조작의 강도와 시기가 매번 변하는 불편함이 있지만 위성을 주어진 최소 궤도 경사각 변화폭 내에 최소의 연료 소모로 위치 유지시킬 수 있다. 위성의 특성상 통신역의 넓은 수신 각도를 가지는 위성이라면 남북 방향 위치 유지는 생략할 수도 있다. 일반적으로 위성에 싣 는 대부분의 연료는 남북 방향 위치 유지에 사용되는 것이므로 남북 방향 위치 유지를 안 한다면 연료 대신 더 많은 짐을 실을 수 있고, 위성의 무게도 철감할 수 있다. MARECS 위성의 경우 는 그 위성의 7 년간의 작동 기간 동안 남북 방향으로 土 3.0° 의 위도 변화만을 보였다 (5 . 3 절 참조). 그러나 이렇게 남북 방향 위 치 유지를 생략해 주기 위해서는 처음에 위성의 궤도 경사각을 가능한 한 줄이는 것이 필수적이다.
동서 방향 위치 유지 때와 마찬가지로 남북 방향 위치 유지 때 도 발생하는 오차의 원인에 따라서 각각의 대처 방법이 마련되어 있다. 앞에서 언급한 바와 같이 남북 방향 위치 유지는 연료 소 모가 크므로 연료의 적철한 소비 계획을 세워주어야 하며, 오차 는 바로 연료의 과소비로 이어지므로 이를 잘 조절해 주어야 한다. 여러 오차들 중 분사 방향이 잘못되었을 경우가 있는데, 이는 지상에서 엄격히 관리되므로 방향 오차는 土 0.5° 이내이고 이로 인한 연료의 소비는 0.004 % 정도로 무시할 만한 양이다. 또한, 분사 세기의 오차는 지상에서 충분히 검사하여 발사되 고, 만약 오차가 생기면 다음 조작시 이를 반영하므로 추가적 연 료 소모는 없다고 할 수 있다. 추적 오차도 생길 수 있으나 동서 방향 위치 유지의 경우와 마찬가지로 보정해 준다. 5. 3 인공위성의 특수 궤도 인류의 역사가 시작된 이래 사람들의 우주에 대한 끝없는 동경 은 여러 학문에 많은 발전을 가져왔으며, 이러한 노력의 결과로 1957 년 10 월 4 일 구소련에서 최초의 인공위성 스푸트니크 (Sp u tn i k ) 1 호가 탄생되었다. 스푸트니크의 발사 이후 인공위성 에 대한 연구는 더욱 활발히 이루어져서 현재에 이르기까지 미 국, 구소련, ESA, NASDA, 인도, 중국 동 여러 국가들에 의해 약 1 만여 개 이상의 인공위성이 발사되어 다양한 임무를 수행하 고 있다. 우리나라의 경우도 스푸트니크 1 호가 발사된 지 35 년 후인 1992 년 8 월 11 일 최초의 인공위성인 우리별 1 호가 아리안 로켓에
탑재되어 발사되었고, 그 이듬해인 1993 년 9 월 26 일 우리별 2 호 도 성공리에 발사됨으로써 위성 보유국의 위치로 발돋움하게 되 었다. 현재 지구 상공에는 이처럼 많은 인공위성들이 각각의 임무를 수행하고 있는데, 이들은 그 목적에 따라 서로 다른 궤도를 움직 이고 있다. 이 절에서는 이러한 인공위성들의 여러 가지 수행 목 적과 그 궤도에 대해서 알아보도록 하겠다. 5.3.1 지구 정지 궤도 지구 정지 궤도란 적도 상공 35, 78 6 km 에서 지구의 자전 주기 와 같은 공전 주기로 원 궤도를 도는 인공위성의 궤도를 의미한 다. 이러한 궤도는 그 형태상 통신 분야에 적용될 수 있는 특별 한 성질들을 가지고 있으며, 현재 방송통신 위성의 궤도로 많이 사용되고 있다. 이 궤도는 1929 년에 H. Noordw ig라는 호주의 공학자가 적도 평면상에서 고도 35,786 km 로 원 궤도를 도는 공전 주기 24 시간 의 위성은 지구에서 보면 마치 정지한 것처럼 보인다는 것을 증 명함으로써 현실화되었다. 그후 1945 년에 영국의 이공계 담당 기 자인 Ar thu r C. Clark 학근 이 궤도상에서 실질적으로 쓰일 수 있 는 통신 체계를 고안해냈는데 그것은 단 세개의 위성으로 전세계 룰 통신권 안에 둘 수 있는 획기적인 것이었다. 그의 이론에 의 하면 이러한 고도 (35,786km) 에서는 하나의 위성이 거의 지구의 절반 가량을 관장할 수 있었다. 지구 정지 궤도는 경우에 따라선 지구 동주기 또는 간단히 동 주기라는 말로 지칭되기도 한다. 그러나 지구 동주기 궤도는 주 기만 지구 정지 궤도와 같을 뿐 위의 모든 이상적인 특칭을 가지
고 있지는 않다. 죽 위성의 궤도가 적도면과 경사를 이루고 있어 도 되며 주기만 24 시간이라면 타원 궤도여도 상관없다. 일반적으로 지구 정지 궤도는 적도면을 위성의 궤도면으로 하 고, 지상 궤적은 위성의 경도를 따라서 적도 위의 한 점으로 표 시된다. 위성은 지표에서 35,786km, 지구 중심에서 42,164km 의 고도에 위치하게 되며, 그 궤도는 이심률이 0 인 원 궤도 를 그 린다. 또한, 위성의 공전 방향은 지구의 자전 방향과 갇은 방향 울 갖고, 지표면의 자전 속도와 일치하는 속도를 갖는다. 보통 지구 정지 궤도의 주기는 24 시간으로 되어 있지만 사실 그 실제 주기는 1 항성일과 같다. 1 항성일은 항성들을 기준으로 지구가 1 회 자전하는 주기로서 태양을 기준으로 한 1 태양일과는 조금 다르게 나타나며, 일반적으로 태양시보다 조금 짧은 23 시간 56 분 4 초의 값을 갖는다. 다시 말해서 지구는 실제로 태양을 기 준으로 했을 때 360° 보다 더 큰 각을 자전하게 되는 것이다. 이러한 지구 정지 궤도는 처음 이 궤도를 실용적으로 사용하려 했던 Arth u r C. Clarke 를 기념하여 Clarke 궤도로 불리기도 하 는데, 보통 다음과 같은 몇 가지 특이한 성질을 갖는다. ® 궤도는 순행한다. 죽 동쪽으로 공전하며, 북국에서 보았을 때 반시계 방향으로 진행한다. ® 궤도는 적도면 내에 있다. 죽 궤도 경사각 i= 0° 이 된다. ® 궤도는 이심률이 0 인 원 궤도이다. 따라서, 원지점이나 근지 점이 존재하지 않는다. ® 궤도 반경은 42,164km( 고도 35,786km) 이며, 이 값은 지구 반경의 6.61 배에 해당 한다. ® 지표상의 지상 궤적은 경도에 따라 적도상의 일정한 점을 나타낸다. 일반적으로 이 점을 위성 칙하접이라고 한다.
® 위성의 선속도는 3.0 7 5 km/s 이다(원 궤도의 상수). ® 위 성 의 각속도는 7 . 292115854 X 10 一 5 rad/s 이 다. ® 주기는 1 항성 일, 즉 23h 56m 4s 이며, 이 값은 0.9973 태 양일과 같은 값을 갖는다. ® 이 고도에서 위성의 시야는 지구 표면의 42 %에 해당하 는 값을 갖는다. ® 지구 정지 궤도의 고도에서 지구의 각크기는 17.3° 가 된 다. @ 궤도 둘레는 264, 92 5 km 이다. 지금까지 우리는 지구 정지 궤도가 갖는 몇 가지 특징들에 대 해서 살펴보았다. 그러나 사실 지구 정지 궤도의 위성은 위에 언 급된 이상적인 특성을 모두 지니고 있지는 않다. 왜냐하면 실제 의 우주는 평온한 것이, 아니며, 이러한 이상적 궤도에 섭동을 일 으키는 힘이 항상 존재하여 위성의 운동에 영향을 준다. 이러한 항들에는 우리가 앞 장들에서 알아본 바와 같이 달과 태양의 중력, 태양의 복사압, 지구의 비대칭성에 의해 계속 변화 하는 적도면상의 중력 등이 포함된다. 이 중에서 달과 태양의 중 력은 주로 위성이 적도면을 북에서 남으로 가로지를 때, 죽 경도 상을 움직일 때 궤도 경사각을 증가시키는 역할을 한다. 만약 위 성이 조정되지 않는다면, 궤도 경사각은 1 년에 약 0.75°~ 0.95° 정도의 변화가 나타나고 평균 0.85° 근처에서 변화폭이 증 감한다. 이 변화의 주기는 18 . 6 년이다. 계속해서 궤도 경사각이 조정되지 않는다면, 궤도 경사각의 변화가 27.5 년간 약 15° 까지 축적되었다가 다시 27.5 년후 oo 로 되돌아갈 것이다(그립 5-16 참 조). 만약 위성이 적도면을 기준으로 궤도를 기울게 하는 힘을 받고
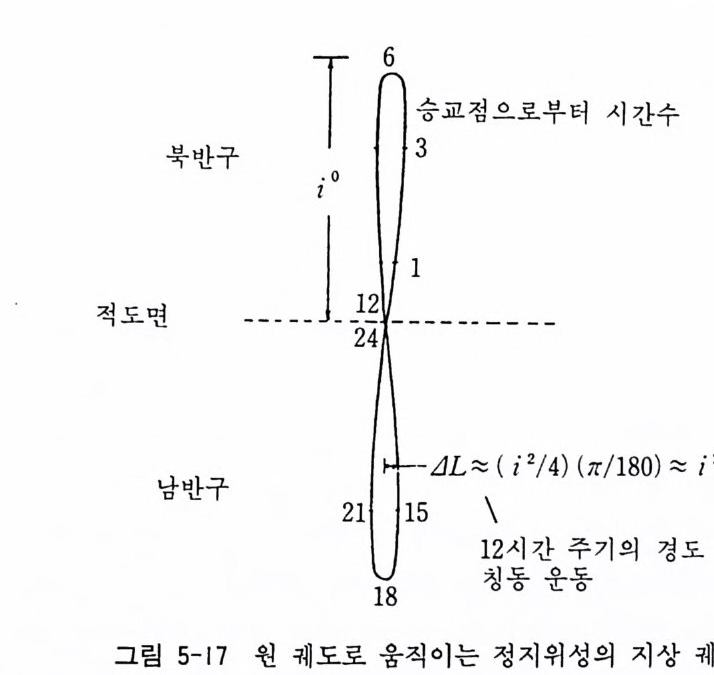 Tl6 I3승 교접으로부터 시간수
Tl6 I3승 교접으로부터 시간수
있다면, 궤도의 지상 궤적은 더 이상 고정된 점으로 나타나지 않 는다. 이 상황에서 위성이 원 궤도를 움직인다면, 그때의 지상 궤적은 24 시간의 주기를 갖고 적도면 아래 위로 진동하게 될 것 이고, 지상에서 보면 그림 5 - 17 과 같은 좁은 8 자 모양으로 나타 날 것이다 . 반면에 위성이 이심률을 가지고 있는 궤도를 움직인 다면 , 이 경우의 지상 궤적은 8 자의 둥근 부분이 비대칭으로 나 타나게 된다. 그림 5-17 에서 보면, 위성의 지상 궤적은 적도 윗부분의 동그 라미에서는 반시계 방향으로 움직이며, 이 경우 최대로 상승 또 는 하강한 위도는 위성의 궤도 경사각과 같은 값을 갖는다. 예를 들어 궤도 경사각이 50 이면, 이때의 지상 궤적은 5°N 에서 5°S 사이룰 움직이게 된다. 그림을 따라 표시된 시간은 승교점 통과 로부터 걸린 시간을 표시하며, 한 바퀴를 일주하는 데에는 항성
시로 24h, 평균태양시로 23h 56m 4s 가 걸린다. 동서 방향의 폭은 그림 5-17 에서 8 자를 나타내기 위해 과장한 것이며, 실제의 경우는 매우 좁은 값을 갖는다. 사실 작은 궤도 경사각의 경우에 있어서 지상 궤적은 아래 위로 진동하는 직선의 모양으로 나타나며, 이러한 동서 방향 이동의 크기를 몇 개의 궤 도 경사각에 대해서 그림 5-18 에 표시하였다. 인공위성이 원궤도를 움직일 경우 이때의 동서 방향 운동은 4L::::: ::: 힙 230( i조 50) 5-115 와 같은 형태로 근사하여 나타낼 수 있으며, 여기서 4L : 승교점으로부터 측면으로 운동한 양 i : 궤도 경사각
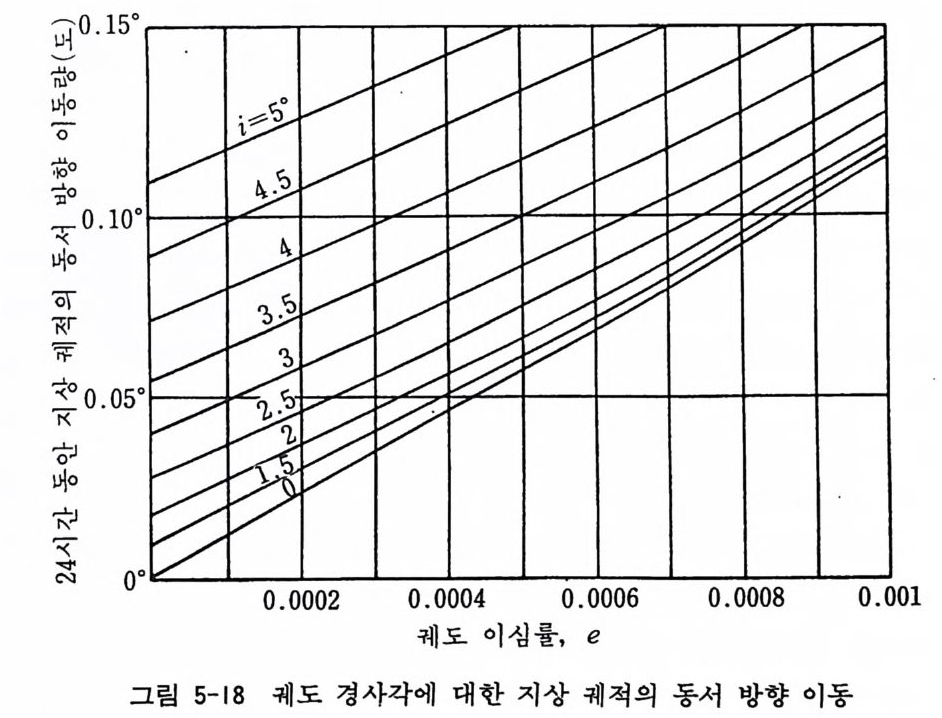 :O.l5°
:O.l5°
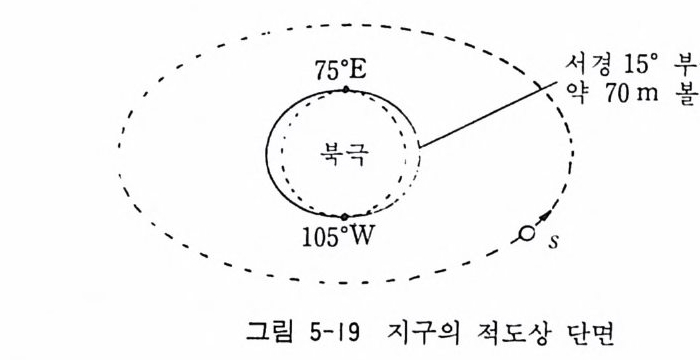 \ -,.-. ' . 10- 5 -°습 W -〔尋/ -, `·-,' '..I , I`/ ` p ` /; \I ,'I \서약 겨 o7 。 1 50m 부볼 록근이함
\ -,.-. ' . 10- 5 -°습 W -〔尋/ -, `·-,' '..I , I`/ ` p ` /; \I ,'I \서약 겨 o7 。 1 50m 부볼 록근이함
울 의미한다. 이와 같은 동서 방향 섭동의 원인은 지구의 비대칭 성 때문이며, 이것은 결국 지구가 적도에서 완전한 원이 아니라 는 것을 의미한다. 그림 5-19 에서 보는 것처럼 지구의 적도 상의 단면은 약간 타 원형을 나타낸다. 이러한 지구의 비대칭적 형태에 의해서 지구의 적도 반경이 변화하며, 이것으로 인해 생기는 중력은 위성을 그 위성의 정해진 위치로부터 이탈시키는 방향으로 작용한다. 이 경 우 위성은 그림 5 - 19 와 그림 5-20 에서 보는 것처럼 중력적으로 안정한 75°E, 105°W 의 위치로 이동하려는 경향을 보이게 된다. 또한, 11°W 와 162°E 에 동서 방향으로의 중력이 균형을 이루는 불안정한 평형점이 있는데, 만약 이 지점들 사이에 위성이 위치 한다면 그 위성은 안정된 지점으로 위치하려 한다. 이 경우 위성 울 안정점 사이에 위치시키려면 부가적인 연료가 필요하며, 연료 롤 다 쓴 위성같이 조종되지 않는 위성은 두 안정점들 중 한 곳 으로 홀러들어간다. 위성의 궤도에 섭동을 주는 또다른 원인으로는 태양의 복사압 이 있으며, 이것은 궤도의 이심률을 증가시키고 위성을 동서 방 향으로 이동시키는 역할을 한다. 이러한 이심률의 증가는 그림 5-18 에 나타나 있는데, 만약 위성이 조종 가능하다면 이 위성을
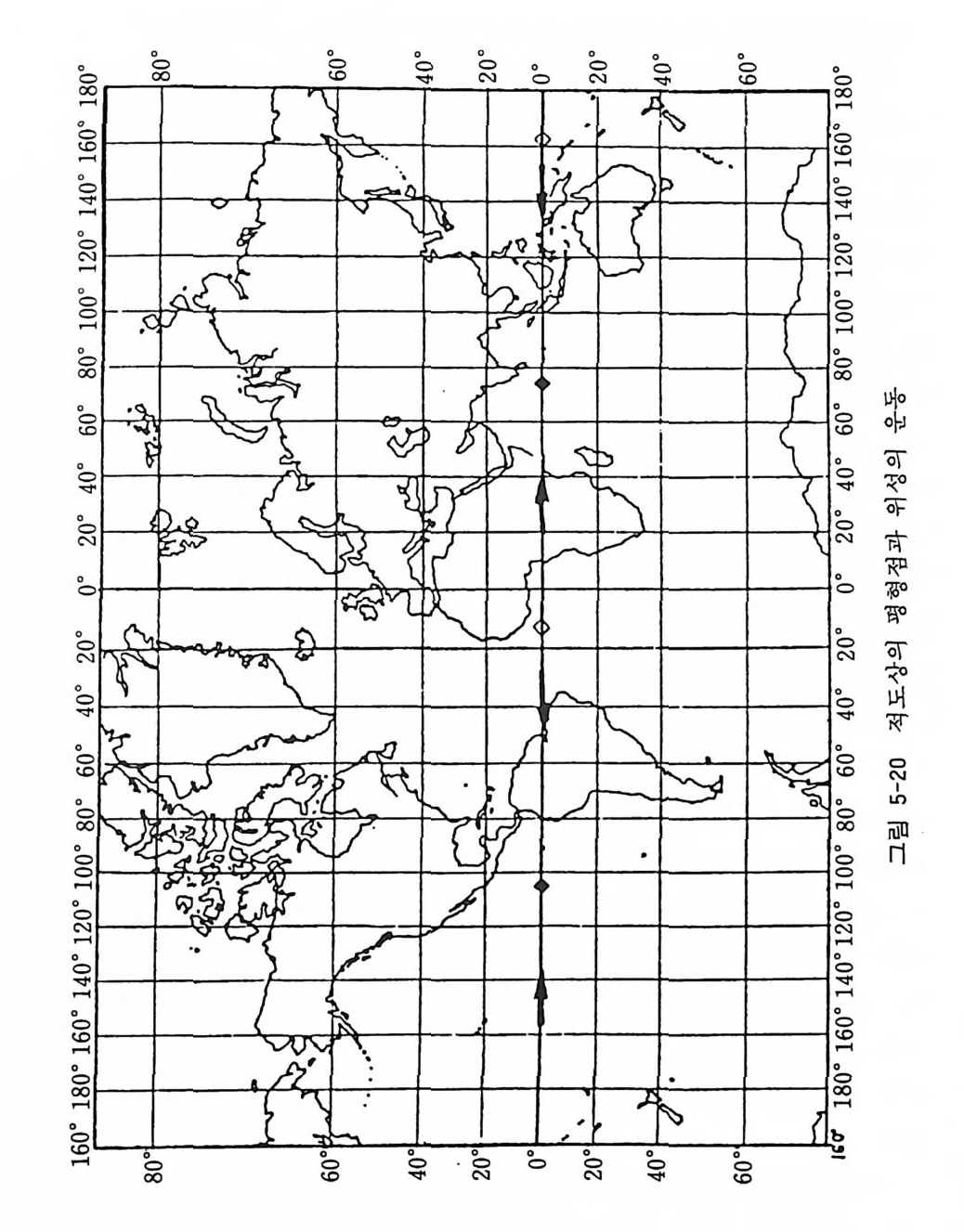 18 °0 0°8 0°60 °4 0°2° 0° 2“040° 6° 080 1°
18 °0 0°8 0°60 °4 0°2° 0° 2“040° 6° 080 1°
지정된 경도에 고정시킬 수 있다. 우리는 지금까지 지구 정지 궤도에 대해서 여러 가지 것들을 살펴보았으며, 이와 유사한 것으로서 앞에서 잠깐 언급했던 지구 동주기 궤도라는 것이 있다. 이것은 업밀히 말해서 지구 정지 궤 도와는 서로 다른 특칭을 갖지만, 그 형태가 비슷하므로 여기에 서 함께 설명하도록 하겠다. 일반적인 경우에 위성이 어떤 궤도 경사각 범위 내에 존재한다 면 위성 위치의 정확한 측정이 요구되지는 않는다. 보통 지상국 의 위성 추적 전파가 상당한 폭을 가지고 위성을 비추기 때문에 위성이 어느 정도 벗어난 곳에 있어도 그 위성을 탐지하는 것이 가능하며, 마찬가지로 위성에서 지상국을 비추는 전파도 폭을 가 지고 있기 때문에 어느 정도의 오차는 허용된다. 지구 동주기 위성에는 위도 81 .3° 이상의 지역을 관측하기 위 해서 일부러 궤도 경사각을 갖는 위성이 있는데, 만약 이 위성의 전파가 충분히 넓은 폭을 가지고 있다면 국지방에 신호를 보내는 데 사용할 수도 있다. 예를 들어 1967 년에 발사되어 수 년전에 모든 연료를 써버리고 지금은 105°W 의 중력 골짜기에 있는 ATS-313 은 그 궤도 경사각 때문에 남극에 매일 자료를 보낼 수 가 있어서 지금도 폴로리다에서 남극까지의 지역은 매일 4 시간씩 이 위성의 서비스를 받을 수 있다. ATS-313 위성의 안데나는 넓은 수신 능력을 지니고 있어 극지역도 전파의 폭 내에 포함된 다. 이 위성은 300b p s 에 불과한 낮은 전송 능력 때문에 음성 신 호는 전송할 수 없지만, 고도가 낮고 많은 전송 능력을 지닌 극 궤도 위성의 도움을 받아 보완되면서 현재도 어느 정도 사용되고 있다. 이것 의에도 〈편향된 경사 궤도〉를 갖는 위성이 있는데, 이 궤 도는 자연적인 힘에 의해 궤도 경사각이 계속 줄어드는 특칭을
가지고 있다. 이 궤도를 움직이는 위성의 경우 사용 기간의 처음 절반 동안 궤도 경사각은 줄어들어 0 으로 되었다가 다음 절반 동 안 처음의 궤도 경사각으로 다시 늘어나게 된다. 이것은 남북 방 향의 자세 조정용 연료를 절약할 수 있고 그만큼의 무게를 다른 용도로 쑬 수 있다는 점에서 유용한 이점을 가지고 있다. 그러나 긴 일생을 가진 위성 (약 10 년)의 경우에 초기의 궤도 경사각값은 지상국의 추적상의 문제로 한계값을 갖게 된다. 보통 지상국에서 추적할 수 있는 위성이 적어질수록 반대로 꼭 추적해야 할 위성 이 늘어나며, 경제적인 조건과 실제 수행상의 문제에 따라 적절 한 값이 결정된다. 자연적인 힘에 의해 궤도 경사각이 줄어드는 이러한 편향 궤도 에 대해서 더 생각해 보자. 달과 태양의 중력 섭동으로 작은 궤 도 경사각을 가지는 궤도의 경우 궤도 경사각이 보통 1 년에 0 . 85° 의 변화를 보이는 것으로 알려져 있다. 이 궤도의 평균 변 화율이 0.85°/ 년이므로, 위성의 일생이 7 년이라고 가정하면 -30 에서 +2.95° 까지 변하므로 이 위성은 土앙의 범위에 위치하는
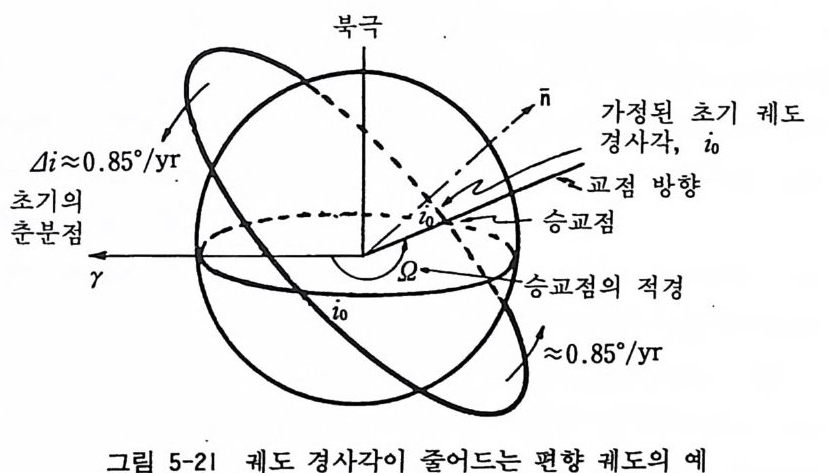 북극
북극
것이 된다. 만약 30 정도의 궤도 경사각의 변화가 위성의 일생 동안에 허용될 수 있다면, 위성은 초기 궤도에 계속 위치할 수 있다(그립 5-21). 이 궤도는 처음엔 궤도 경사각이 줄어들어 oo 로 되었다가 다시 다른 방향으로 30 까지 늘어나게 되는데, oo 가 되 는 주기는 대략 3.53 년이 된다. 이와 같은 경사 궤도에 있어서 대략 어느 정도 개수의 위성이 배치될 수 있는가는 원칙적으로 위성의 전기적 간섭에 의해 결정 된다. 죽 같은 주파수를 사용하는 이웃한 위성간의 간격은 지상 국에서 원하는 위성을 추적하는 안테나의 방향성에 좌우되며, 보 통 지역 통신위성의 경우 사용 연료에 따라 20-40 의 간격이 요구 된다. Rowe 와 Penzia s 등은 궤도 효율을 높이기 위해서 경사 궤도 의 여러 곳에 위성을 배치하거나, 그림 5-22 에 보인 것처럼 여러 위성들이 같은 8 자 모양의 궤도를 그리도록 배치하는 것을 제안
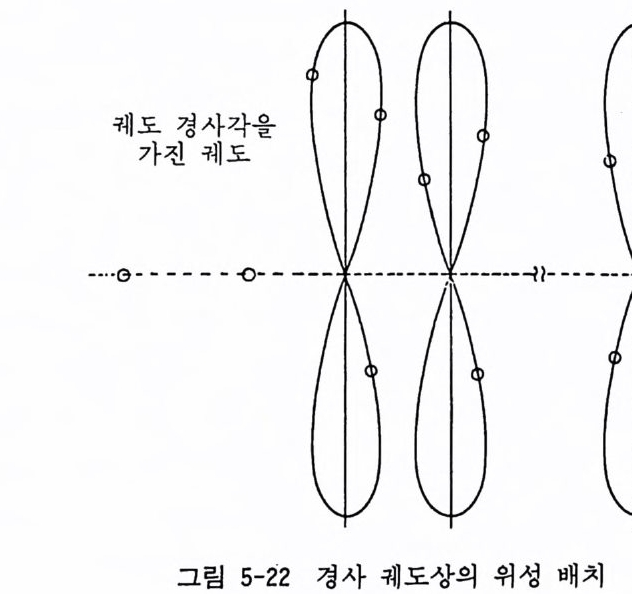 궤도 경사각을
궤도 경사각을
했는데, 이렇게 하면 서로 거의 간섭이 없이 고전적인 위성의 집 합 개념보다 더 많은 위성을 같은 궤도에 올릴 수 있었다. 그러 나 이 개념의 경우도 만약 지상국과 위성이 직선 전파를 사용한 다면, 각각의 위성을 추적하는 데 서로 다른 전파를 사용해야 한 다는 제약을 가지고 있다. 이런 단점을 해소하기 위해서 현재에 는 위성 안에 자세 조정용 부속 장치를 쓰는 것이 시도되고 있으 며, 이것을 사용하면 위성에 장치된 추진기가 전파를 지상국으로 향하도록 자동으로 조종할 수 있다. 또, 위성 전체를 움직이지 않고 안데나만 기계적으로 조종하거나 전기적으로 전파를 조종하 기 위해 위상 배열을 사용할 수도 있다. 이 방법들은 위성의 연 료를 쓰지는 않지만 반면에 다른 연료원이 필요하게 된다. 앞 장에서 자세히 설명한 바와 같이 위성의 남북 방향과 동서 방향의 위치 유지를 위해서는 이와 같이 위정에 장치된 추진기가 사용되며, 남북 방향 위치 유지에 필요한 연료는 동서 방향 자세 유지에 드는 양보다 열 배 이상이 요구된다. WARC-79(World Admi ni s t r a ti ve Radio Confe re nce in 1979) 이 전 엔 위 치 추정 상에 土 0.1° 정도의 정확도도 얻어내지 못했으나 현재의 기술은 더 정 확한 수치를 가능하게 했으며, 이런 정확도는 통신위성이 같은 주파수를 사용하면서 연속적으로 있을 경우에 요구된다. 이 경우 위성간의 간섭에 의한 영향이 매우 중요한 조건이 된다는 것은 주지해야 할 사실이다. 남북 방향의 위치 유지에 관해서 ITU 는 궤도 경사각이 0.5° 이상인 것은 적어도 조종적인 관점에서 지구 정지 궤도가 아니라 고 청의한 바 있다. 어떤 범위에서는 위의 가정이 어느 정도 의 심이 가지만, 어쨌든 현재의 GSO 통신위성은 남북과 동서 방향 으로 土 0.05° 내의 위치 유지를 할 수 있으며, 새로운 추진제가 개발되면 위성 · 무게의 약 20 %를 차지하는 연료의 전체 요구량
의 비율을 더 줄일 수도 있을 것이다. 이 연료 중 일부는 위치 유지용과 비슷하거나 같은 추전제가 사용되는데, 주로 인공위성 의 자세 조정을 하는 데 쓰인다. 5.3.2 경사진타원궤도 타원 궤도는 적도면과 어떤 경사각으로든 존재할 수 있으나, 이 중 가장 유용한 궤도는 궤도 경사각이 0° 보다 큰 경우들이다. 일반적으로 지구 정지 궤도의 경우 土 81° 이상되는 지점에서의 지상국 검출 안데나의 고도가 지구 정지 궤도 위성을 향할 때 0° 이하가 되므로 그 이상의 위도에서는 지구 정지 궤도 위성을 관 측할 수 없으며, 따라서 이들 지역에서 위성의 서비스를 제공받 기 위해서는 북반구나 남반구에 원지점을 갖는 큰 이심률의 경사 전 타원 궤도가 필요하게 된다. 이와 같이 지구 궤도를 도는 전형적인 타원 궤도에서는 케플러 제 2 법칙에 의해 위성은 오랜 시간 동안 원지점 근처에 머물게 되 며, 궤도의 이심률이 커질수록 이러한 〈원지점 체류〉는 길어전 다. 지구에서 보는 경우 위성은 이 근방에서 오랜 시간 동안 떠 있는 것으로 보일 것이며 비추적 지상국 안테나를 포함해서 많은 곳에 계속적인 서비스를 할 수 있다. 이런 형식의 궤도는 구소련 이 Molniy a 위성들을 통해 자기 영토에 서비스를 제공하는 데 많이 사용하고 있는데, 아마도 이 위성이 북위도 지역에 서비스 를 제공하는 유일한 상용 타원 궤도 위성일 것이다. 이 궤도에서 위성은 12 시간의 공전 주기를 가져 하루에 지구를 완전히 2 바퀴 돌며, 원지점은 39,500km, 근지점은 1000km 의 고도에 위치한 다. 이 경우 두 개의 원지점 중 하나는 유럽-러시아 상공에 있 고, 다른 하나는 북아메리카 상공에 위치하는데, - 이 위치에서는
지상 관측자에게 위성이 그 지점에 준안정 상태로 있는 것처럼 보일 것이다. 이와 같은 위성은 구소련의 중부인 90°E 지역에 하루에 8 - 12 시 간 정도 서비스를 할 수 있으며, 24 시간 내내 서비스를 받기 위 해서는 추가적인 위성이 필요하게 된다. 따라서 24 시간 서비스를 받기 위해서 서로 8 시간 또는 120° 떨어지게 배치된 세 개의 위 성이 쓰이는데, 다른 원지점은 180° 떨어전 270°E(=90°W) 에 위 치한다. 90°E 의 위치 의에 다른 곳에 중심을 두고 있는 궤도들 의 원지점의 위치는 모두 연결하면 원을 이루게 된다. 이러한 경사전 궤도에 있어서 궤도 경사각이 임의의 각을 갖는 경우 지구가 볼록한 모양을 하고 있으므로 근지점의 위치각은 계 속 변화하여 궤도 장축 이동을 하게 되는데, 이러한 세차 운동 (pre cessio n ) ――근지점 위치각의 변화-의 비율은 릅 =K[( 紅 cos2 i— 2] 5- 11 6 와 같은 형태로 나타낼 수 있으며, 여기서 K 는 궤도 경사각과 무관하고 이심률과 장축의 길이룰 포함한 상수를 의미한다. 이 식에서 i =63.4° 일 때 d(J }/d t = O, 죽 (J}는 상수가 되어 근지점은 이동하지 않고, 궤도 경사각이 63.4° 가 아닐 때는 근지점이 이동 하게 되는데, 이 경우 근지점 이동의 영향으로 원지점의 위치도 변화하게 된다. 우리가 지금까지 알아본 바와 같이 위성이 이와 같이 기울어진 타원 궤도를 움직이는 경우에는 몇 가지 독특한 특칭을 갖게 되 며, 그것을 정리하면 다음과 같이 요약할 수 있다. ® 지구 정지 궤도가 위도 土 81° 이상인 지역에는 서비스를 제공
하지 못하는 반면 이 궤도는 고위도나 극지방에까지 서비스를 제공할 수 있다. ® 위성이 원지점 근처에서 오래 머물게 되어 고위도 지방에 계 속적인 서비스를 제공할 수 있다. i =63.4° 인 경우 원지점 이 동이 없으므로 위성은 계속 같은 위치를 유지할 것이다. ® 지상국 안테나의 방향이 높이 향하므로 지상 구조물이나 날씨 등의 영향을 적게 받게 된다. ® 위성의 수신 시간 전후에 쓸모없이 소비되는 시간이 적으므로 많은 용량의 서비스가 가능하다. ® 지구 정지 궤도의 위성보다 더 적은 연료 를 사용하여도 타원 궤도 내에 위성을 유지시킬 수 있다. ® 24 시간 계속적인 서비스를 받기 위해서는 여러 개의 위성이 계속 연계되어야 한다. ® 수신 채널의 추적시 높은 도풀러 이동이 고려되어야 한다. 그 러나 원지점 근처에서는 속도가 상대적으로 낮으므로 크게 고 려하지 않아도 된다. ® 위성은 궤도상에서 공전하는 동안 주기마다 두 번씩 반알렌 복사대를 지나게 되는데 이는 위성의 수명을 짧게 할 수 있다. ® 이 궤도에서 위성의 수명은 잘 알려지진 않았지만 지구 정지 궤도보다는 짧으며, 연료 공급에 따라 7-10 년 정도가 된다. 5. 3. 3 툰드라/고리 궤도 통신용으로 서비스를 제공하는 위성의 궤도 중에는 특이하게 이심률이 큰 타원 궤도들이 있다. 이 중 가장 대표적인 것이 주 기 24 시간, i =63.4° 인 툰드라 궤도이다. 이 궤도는 원지점 고도 가 46,300 km, 근지점 고도가 25,300 km 이고, 이심률이 0.2-0.4
정도의 값을 갖는 타원 궤도로서 근지점이 세차 운동을 하지 않 는다. 이러한 툰드라 궤도 의에도 이심률이 큰 타원 궤도를 사용하는 궤도로는 고리 궤도가 있으며, 이 궤도에서는 24시간 계속되는 서비스를 제공할 수 있다. 이 고리 궤도에서는 i=63.4°, 근지접 고도 5784 km, 원지점 고도 41,450 km인 세 개의 궤도가 쓰이는 데, 각각의 궤도에는 궤도 평면을 120°씩 나눈 위치에 1개씩 총 세 개의 위성이 사용된다. 이 위성들은 5개의 지역에 24시간 계 속되는 서비스를 제공할 수 있으며, 이 경우 궤도 요소는 각 위 성이 같은 궤도를 쫓도록 주어진다. 예를 들어 그림 5-23에서 위 성 3이 고리를 떠날 때 위성 4가 고리에 도착하므로, 위성 3을 쫓는 지상 안데나는 위성 4도 같이 추적할 수 있다. 이해를 돕기 위하여 그림 5-23에 고리 궤도에서의 위성 체계를
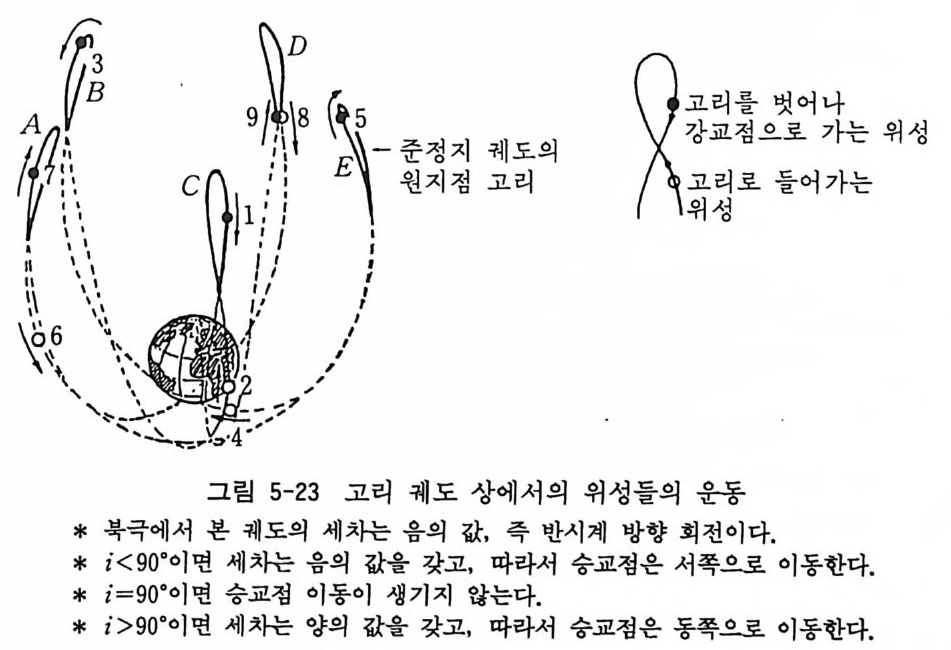 丘
丘
간단히 나타내었다. 이 그림에서 보면 고리 궤도 (LOOPUS ORBIT : Qu asi- G eosta t i on ary Loop in Orbit Occup ied Permanentl y by Unsta t i on ary Sate l l ite) 라는 이 름 그대 로 먼저 위 성 6 이 위 성 9 롤 대신한다. 이어서 위성 9 는 위성 8 이 대신하고 위성 2 는 위성 1 이, 위성 8 은 위성 7 이, 위성 1 은 다시 위성 9 가 위성 3 은 위성 2 가 대신한다. 이런 식으로 계속 반복되어 위성이 움직이기 때문 에 고리 궤도에서는 지상 안데나의 움직임이 없이도 계속해서 위 성의 서비스를 받을 수가 있게 된다. 고리 궤도의 또다른 장점은 이심률이 큰 타원 궤도를 갖기 때 문에 지상국 안테나가 천정 부근을 향한다는 점이다. 보통 원지 점의 고리의 경우 고위도에서도 50° 이상의 고도를 갖는데, 이러 한 고리 궤도의 성질은 위성의 관측시 여러 복합적 영향을 줄여 주는 역할을 하기 때문에 매우 유용하다. 표 5-4 에 지구 정지 궤도가 아닌 다른 궤도를 움직이는 여러 위성들의 자료들을 서로 비교하여 정리하였다.
표 5-4 여러 타원 궤도들의 궤도 요소 비교 Paramete r Molni ya Tundra LOOPUS GSO 경궤도사 각 6타3원.4 ° 6타3원.4 ° 6타3원.4 ° o원· 주기 12 시간 24 시간 14.3 시간 24 시간 원지점 고도 39,500 km 43,300 km 41,450 km 35,700 km 근지점 고도 1,000 km 25,300 km 5,784 km 35,700 km 이십률 0.72 0.25 0.59 。 위성 수 1 1 3/ 궤도 1
5.3.4 태양 동주기 궤도 지구는 완전한 구가 아니라 적도 방향으로 약간 찌그러진 타원 체의 모양을 하고 있다는 것은 이미 잘 알고 있는 사실이다. 이 러한 지구의 편평률은 위성의 궤도에 크게 두 가지의 영향을 미 치는데, 그 중 한 가지가 승교점이 적도를 따라 이동한다는 것이 다. 승교점은 위성이 역행을 하는가 순행을 하는가에 따라서 동 쪽으로 또는 서쪽으로 이동할 수 있는데, 일반적으로 그 이동 방 향은 위성의 회전 방향과 반대 방향을 갖는다. 이러한 승교점 이 동의 모습이 그림 5-24 에 잘 나타나 있다. 이 그림은 궤도 경사 각이 goo 이상인 경우이며, 이때 승교점은 동쪽으로 이동하게 된 다. 이 경우 승교점 이동을 승교점의 적경 요의 변화량으로 표시하 면
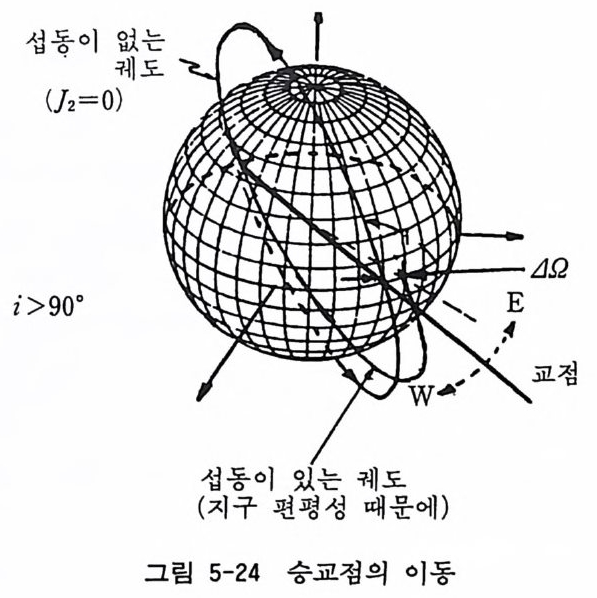 i> 90°
i> 90°
4g = _ 37[ah 2 R (1 젊- ec)o 2s i (rad/rev) 5-117 의 형태가 되며, 여기서 a 는 위성의 궤도 장반경을 나타낸다. 이 식에서 i >90° 인 경우 4 요는 양의 값이 되어 승교점은 동쪽 으로 이동하게 되는데, 이는 태양 동주기 궤도에 있어서 중요한 성질이 된다. 이러한 승교접 이동은 보통 이심률이 큰 궤도일 수 록 더 큰 값을 가지며, 하루에 승교점이 이동하는 양은 궤도 경 사각과 고도의 함수로 나타난다. 그림 5-25 에 이들 사이의 관계 를 보였다. 그림에서 변수는 주기로 주어져도 상관없으며, 승교
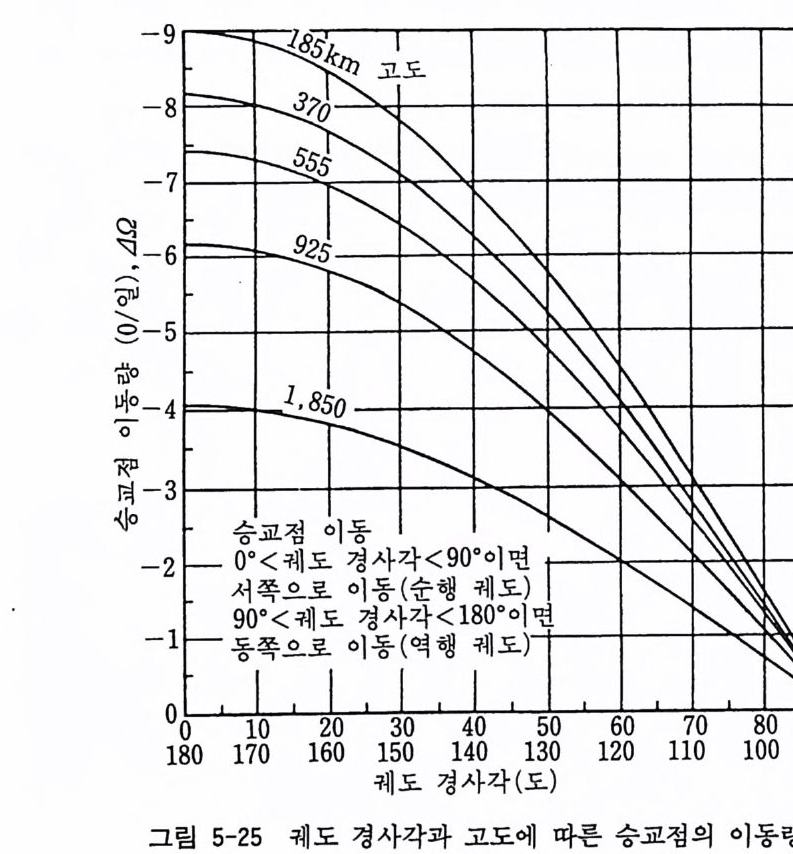 -9
-9
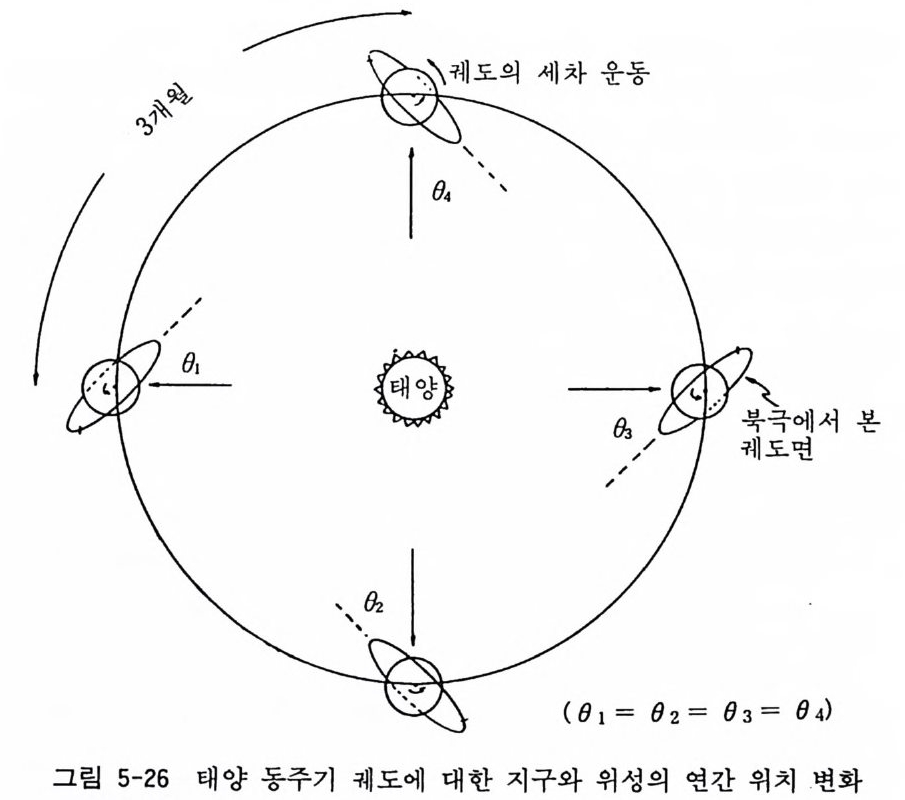 露
露
점 이동은 궤도 경사각이 g oo 이거나 국 궤도인 경우에 가장 작은 값을 보인다. 만약 위성이 저고도이고 작은 궤도 경사각을 가지 면, 승교접 이동은 하루에 g o 까지 커질 수도 있다. 실례로 미국 의 스페이스 셔틀 궤도의 승교점 이동은 하루에 7.5° 이다. 이와 같은 승교접 이동의 성질을 이용하면 1 년 내내 위성이 태 양을 향하도록 할 수가 있다. 죽 위성은 어떤 주어진 위도의 지 점을 매일 같은 시간에 지나가게 된다. 이런 궤도를 흔히 태양 동주기 궤도라고 하는데, 환경 연구나 군사적 정찰 등의 목적에 매우 유용하다. 이 궤도는 반드시 궤도 경사각이 90° 보다 크거나 역행이어야 하며, 이 경우 궤도 경사각은 고도와 이심률에 의해
좌우된다. 그림 5-26 에 1 년 동안 태양 동주기 궤도에 대한 지구와 위성의 모습을 나타내었다. 이 그림에서 보면 궤도면은 석 달에 90° 씩 세차 운동을 하여 항상 태양을 향하고, 승교점은 하루에 0.9856° 씩 동쪽으로 이동하게 되는데, 이것은 그림 5-25 에 나타나 있는 바와 같이 고도 900 km, i =90° 인 위성의 경우와 같은 값을 갖 는다. 지구의 편평률이 위성의 궤도에 미치는 또다른 섭동 효과는 근 지점 또는 원지점을 이동시키는 것이며, 이것은 결국 궤도 장축 의 이동과 같은 효과를 가져온다. 이 경우 주기당 근지점 인수 (J)의 변화량은
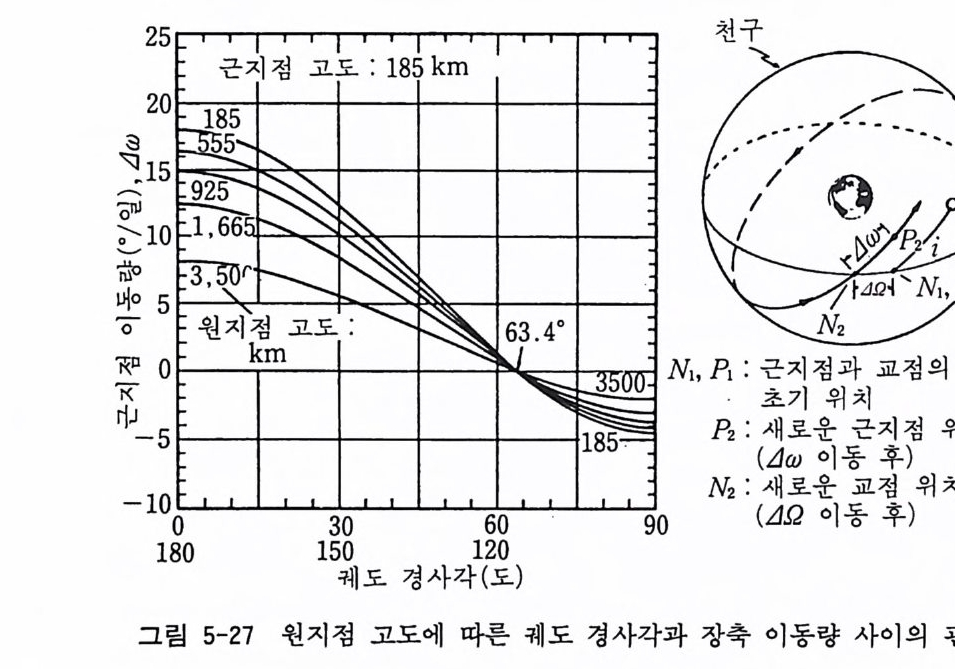 25
25
4(J J= -:沼劇(f) sin 2 i- 2] (rad/rev) 5-118 와 같은 형태로 표시할 수 있다. 식 5-118 에서 (JJ가 상수값울 갖기 위해서는 (f) sin 2 i— 2=0 5-119 의 관계가 성립하여야 하며, 위 식을 만족시키는 궤도 경사각으 로는 63.4° 와 116.6 ° 가 있다. 그립 5-27 에는 원지점 고도에 따라 변화하는 궤도 경사각과 궤도 장축 이동량 사이의 관계가 나타나 있다. 이 그림에서 보면 궤도 경사각이 63.4° 에 가까이 접근함에 따라 장축의 이동은 0 이 되었다가 63.4° 보다 커지면 역행하게 됨 울 알 수 있다. 5. 3. 5 통신용의 저고도 위성 통신용의 저고도 위성 궤도 (LEO : Low Earth Orb it)는 요즘 들 어서 많이 사용되는 궤도이다. LEO 의 고도는 1500km 정도로써 각종 감시, 지구 자원, 과학, 중력 검사 등의 여러 목적에 다양 하게 쓰이며, 특히 요즘 통신용으로 크게 각광받고 있다. 또한, 휴대폰이나 자동차, 배 등의 위치 결정, 조사, 구조, 전자 통신 등 새로운 영역도 개척하고 있는데, 이런 위성들로는 보통 500 kg 이하의 작고 상대적으로 값싼 저궤도 소형 위성들이 많이 사 용된다. 이런 소형 위성들은 일반적인 통신위성보다 통신 채널도 적고 여러 기능이 제한되어 있지만, 반면에 목적에 따라 유리한 경우 가 많고 사용 주파수대가 좁아도 되며 심지어는 다른 위성과 주
파수대를 공유할 수도 있다는 장점을 가지고 있다. 일반적으로 초기의 통신 위성들은 모두 저궤도로 고안되었는 데, 그 중 대표적인 것으로 Telsta r I , Il 와 Rela y가 이에 포 함된다. 여기에는 몇 가지 명백한 이유가 있는데 첫째는 발사체 가 위성을 높은 고도에 올리는 데 적합지 않았고, 둘째는 위성 기술이 고전압이나 넓은 파장대를 관장할 만큼 성숙하지 않았기 때문이다. 또 우주 환경도 찰 알지 못하고 있어서 이때의 위성의 수명은 매우 짧았다. 그러다가 차츰 기술이 발달함에 따라 위성 의 고도도 높아지는 경향이 생겼으며, 위성과 발사체도 커지고 비용도 많이 들게 되었다. 근래에 들어서는 위성에 탑재한 전자 장치의 최소화, 송수신기 부분, 컴퓨터 등 기술의 발달로 고집적 회로와 높은 수행 능력을 갖추게 되었고, 또 값싸게 소형 위성을 저고도에 올리는 발사체 가 개발됨으로써 저고도 소형 위성의 황금기가 열리게 되었다. 이와 같은 저고도 위성은 최근에는 통신과 군사적 목적에서 지구 정지 위성의 기능을 보완하면서도 나름대로 독특한 기능을 수행 하고 있다. 그러나 군사적인 면에 있어서 저고도 위성은 공격받 기 쉽기 때문에 고도가 높은 위성도 여전히 필요성을 유지하고 있다. 우리는 지금까지 LEO 위성이 갖고 있는 여러 가지 특칭들에 대해서 생각해 보았다. 이제 이들 장단점을 간단히 정리해 보면 다음과 같다. ® 발사체의 추전력이 약해도 되며 다단 로켓도 필요하지 않다. ® 저고도에서 활동하므로 신호의 공간 유실이 적다. 죽 위성의 전력이 작아도 되며 더 작은 태양 전지와 축전지로도 동작이 가능하다. 지구 정지 위성과 비교한 공간 신호 손실은
L = lO lo g(信 )2 5-120 의 관계에 의해 30dB 정도로 계산된다. ® 지구 자기장을 이용하여 약한 중력 경사 안정화 방식으로 보 다 쉽게 위성의 자세 조정이 가능하다. @ 저고도이기 때문에 위성과 지상국의 안데나가 더 넓은 파장역 을 사용할 수 있으며, 이것은 위성의 추적을 쉽게 해준다. ® 전파의 연착이 없기 때문에 음성 신호 전달시 에코가 적다. ® 지구 사진의 해상도가 높다. 대표적인 것으로 프랑스의 Sp o t 위성과 미국의 Landsat 위성이 있다. ®발사와 위성의 건조에 적은 비용이 든다. 대략 천만 달러에서 천오백만 달러 이 하의 값을 갖는다. ® 극 궤도와 경사 궤도를 이용하여 고위도 지방에 서비스를 제 공할 수 있다. ® 혁신적 기술이 필요없다. ® 건조와 발사에 1-2 년 정도밖에 걸리지 않는다. @ 가볍고 작으므로 한 발사체에 많은 위성을 실을 수 있다. @ 위치 결정에 도풀러 편이를 이용할 수 있다. @ 전력아 적게 든다. @ 저주파로 작동되므로 값싼 안데나를 사용해도 된다. ® 위성이 곧 시야에서 빠지기 때문에 단일 위성으로 100% 실시 간 동신을 할 수 없으며, 계속적인 연속 서비스를 위해서는 많 은 위성을 필요로 한다. 일반적으로 송수신을 하는 두 지역이 위성의 전파 영역 안에 갇이 있을 경우에는 죽석에서 중계를 해줄 수 있으나 보통 1500km 고도의 위성의 경우 한 지역을 지나는 시간이 20 분 정도 소요되므로 먼 지역 간의 송수신일 경우는 저장-발신 시스템을 써야 한다. ® 위성이 빨리 움직이므로 수신 신호에는 도플러 편이의 보정이
필요하다. 보통 편이되는 양은 위성의 고도와 사용 주파수, 사 용 전파에 대한 위성의 운동 등의 함수로 나타난다. @ 위성이 1 회전할 때마다 한 번씩 지구가 태양을 가리므로 이 때 사용할 충분한 전력을 가져야 하며, 태양을 보는 동안에 다 시 충전할 수 있어야 한다. 일반적으로 조건이 맞는다면 위성 의 고도를 높임으로써 이 차폐의 영향을 줄일 수 있으며, 어떤 위성들 중에는 태양이 가려졌을 때에 전원을 꺼서 전력을 아끼 는 경우도 있다. ® 지상국은 빠르게 움직이는 위성을 추적해야만 하며, 이는 공 모양 안테나를 쓰거나 방향 조절이 되는 안데나를 써서 해결할 수 있다. 후자의 경우 계속적인 서비스롤 받기 위해서는 다음 에 오는 위성을 계속해서 추적할 수 있어야 한다. @) GSO 위성에 비해 용량이 적다. ® 통신 관리가 더 복잡하다. @ 수명이 5 년 이하로 짧다. 일반적으로 위성을 사용하는 도중에 공기 저항으로 기계가 손상되며, 시간이 지남에 따라 위성이 궤도 바깥으로 밀려나가게 된다. @ GSO 위성에 비해 k g당 비용이 더 많이 소요된다. 보통 GSO 위성은 6000 달러인데 비해 LEO 위성은 12,000-15,000 달러 정 도의 바용이 든다. 이상과 같이 LEO 위성에는 여러 가지 다양한 특칭둘이 존재 한다. 이 중 위성의 고도가 낮기 때문에 실시간 통신을 하는 데 에 여러 어려움이 존재한다는 것이 이 위성의 사용하는 데 가장 큰 단점으로 작용하며, 이러한 단점울 극복하기 위해서 지금까지 통신 방법에 대한 다양한 연구들이 이루어져 왔다. 이러한 통신 방법들 중에서 두 지접 간의 통신에는 일반적으로 두 가지 방식
이 주로 사용되는데, 여기에서는 이것들에 대해 간단히 알아보도 록 하겠다. 이 중 하나는 통 신 방식으로서 이 방법 은 송수신을 하는 두 지점이 모두 위성의 시선 영역 내에 있어야 만 통신이 가능하다. 이 방석은 질문을 송신하면 바로 상대방의 회신을 받을 수 있는 실시간 통신이 가능하다는 특징을 가지고 있으며, 이 경우 지구 상에서 위성을 볼 수 있는 시간대는 위성 의 고도와 지상 안테나의 최저 고도 a 의 함수로 나타난다. 보통 위성을 볼 수 있는 지상 안테나의 최저 고도는 5°-10° 정도의 값 을 갖는다. 이 방식에서 최장 시간 동안 서비스를 받을 수 있는 경우는 위성의 지상 궤적이 바로 관측소를 지나는 경우인데, 보 통의 경우 지상 궤적이 관측소 바로 위를 지나기가 힘들기 때문 에 사실상 위성을 볼 수 있는 시간은 위성과 관측소간의 위도와 경도의 차이에 달려있다고 할 수 있다. 두 지점 간의 통신 방법 중 또다른 하나는 축적 전송 방식이 다. 이 방식은 A 지점과 B 지점을 위성이 동시에 볼 수는 없지만 A 지점을 지날 때 위성으로 전송된 신호를 위성의 컴퓨터에 기억 시켰다가 B 지점을 지날 때 지상으로 전송하는 방법이다. 이 방식의 경우 위성 궤도의 일부만이 한 지방에서 관측되기 때문에 지속적인 실시간 서비스를 받기 위해서는 다른 궤도를 가 진 여러 위성이 필요한데, 여기에는 경사 원 궤도, 극 원 궤도, 기타 여러 궤도를 포함한 시스템들이 사용된다. 이 중 경사 궤도 는 국지방에 서비스를 제공하기는 힘들지만, 반드시 위성의 지상 궤적이 목표로 하는 지방울 지나지 않더라도 위성 전파의 전송 가능 영역에만 들어오면 위성의 서비스를 받을 수 있다는 장점을 가지고 있어서 위성이 올라갈 수 있는 최고 위도보다도 더 고위 도 지방에서도 그 위성의 서비스를 받을 수 있다는 특칭이 있다. 보통의 경우 경도가 다른 여러 개의 경사 궤도에 각각 몇 개씩
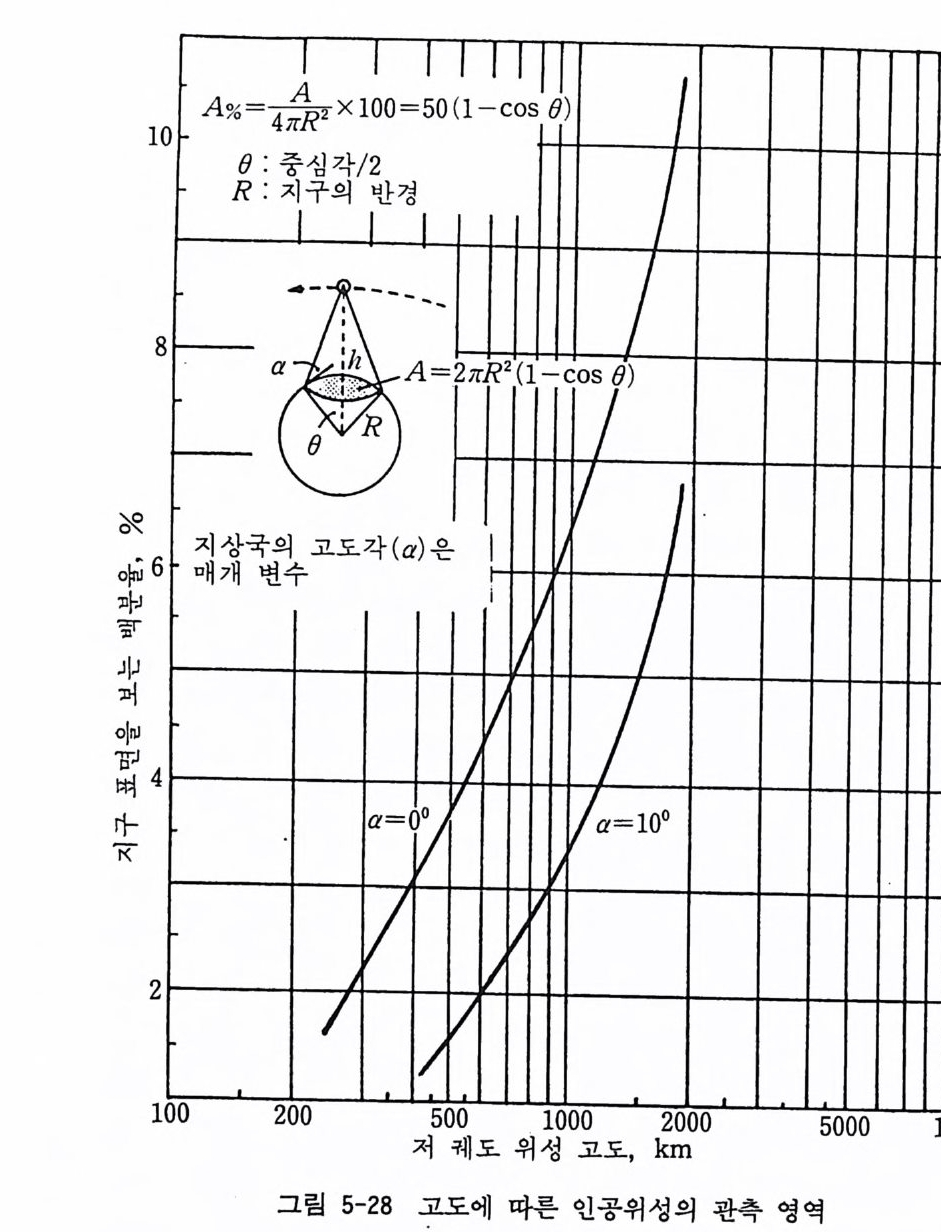 10 A%o= : 갑 중Ik I심 z 각 x /1 2I0 0=5II 0 (I1 — 1co1s l 0l) II
10 A%o= : 갑 중Ik I심 z 각 x /1 2I0 0=5II 0 (I1 — 1co1s l 0l) II
의 위성이 배치되는데, 비록 통신은 더 복잡해지지만 위성의 전 파를 교묘히 조종하면 여러 위성과 통신할 수 있으며 위성끼리의 연계도 가능하다. 이와 갇이 한 궤도의 여러 LEO 위성이 여러 지역에 동시에 서비스를 제공하는 방식의 경우 전파의 관장 영역은 위성의 고도 에 따라 달라지 며 , 통신 가능 지 역 (CFOV: Communic a ti on fiel d of vie w ) 이 광학적 으로 볼 수 있는 영 역 (OFOV: Op tica l field of v i ew) 보다 좁을 경우 위성이 관장할 수 있는 영역은 더 좁아지게 된다. 위성 궤도면 내의 지상 관측소가 볼 수 있는 각거리는 A 지점 에서 중심각의 반을 0 라고 할때 (20/360°) 가 되며, 따라서 관측 이 가능한 시간은 위성의 공전 주기가 T 일 때 (20/360°) T 로 나타낼 수 있다. 여기서 a 를 통신 가능 각도라고 하면 a 가 커짐 에 따라 O 는 줄어들게 되며 위성을 볼 수 있는 시간도 줄어든 다. 즉 a=0° 일 때 지평선 상에 위성이 있어서 광학적으로 위성 을 최대로 관측할 수 있지만 통신 가능 각도는 이후로 점점 줄어 들게 된다. 예를 들어 평균 고도 1000 km, a=0°, 주기가 105 분 인 위성의 경우 최대로 위성을 볼 수 있는 시간은 18 분이 되지 만, 실질적으로 지상국 안테나의 최저 고도인 a=l0° 일 때를 생 각해 보면 시간은 13 분으로 줄어든다. 이와 달리 극 궤도들은 모두 두 극에 가깝게 고위도로 지나간 다. 이런 궤도들은 그림 5-29(a) 에서 보듯이 그 구성된 모양 때 문에 (bi rd-ca g e( 새장)〉 궤도라고도 불리며, 여기에는 U. S. TRANSIT 이 나 Mo t orola 의 이 리 듐 (Irid i u m ) 시 스템 들이 포함된 다. 한편 위치 조정을 하지 않고 궤도 경사각이 계속 변하는 무 계획적인 궤도는 위상을 조절하는 궤도들보다 더 많은 위성을 필 요로 하고 위성의 수는 서비스를 하는 시간에 비례하게 된다.
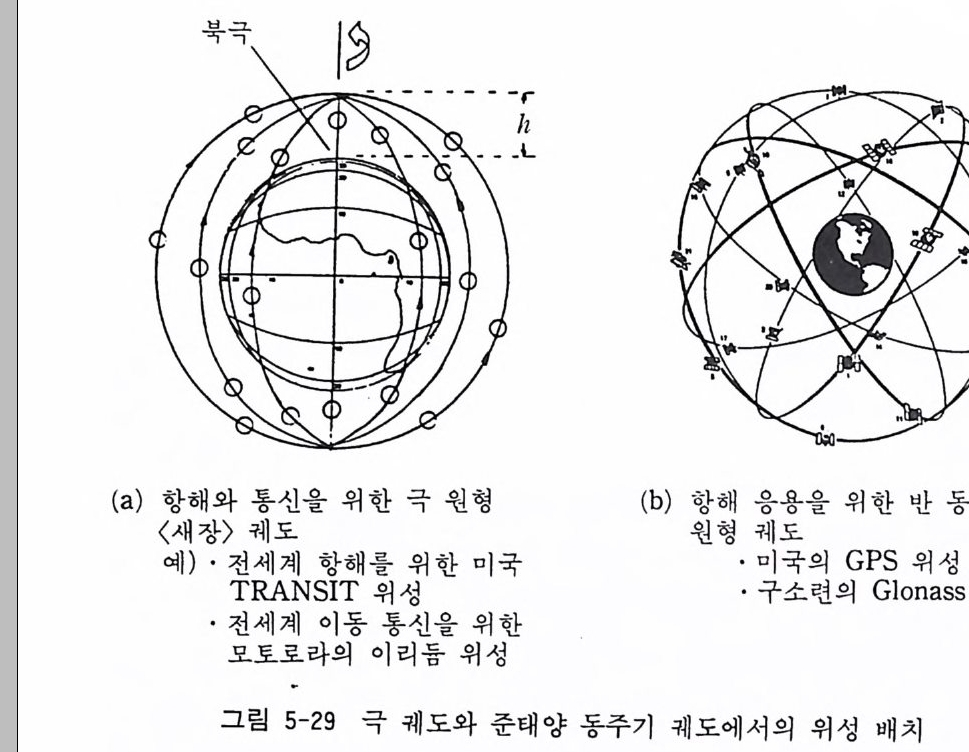 북국
북국
5.3.6 준태양 동주기 궤도 항법 시스템에 적용되는 또다른 궤도에는 준동주기 궤도라는 것이 있다. 이 궤도는 고도 20,000 km, 주기 12 시간 정도의 값 울 가지며, 미국의 Global Posit ion in g S y s t em(GPS) 이나 구소련 의 Glonass Sy st e m 등이 여기에 속한다. 이들은 위성의 사용자에게 신호를 주는 downl i nk 만 할 뿐 사 용자가 위성을 제어 (u pli nk) 하지는 않으며 위치 측정의 정확성과 연속적인 서비스를 위해서 몇 개의 궤도에 여러 위성을 사용한 다. 미국의 시스템의 경우 i =55° 인 6 개의 원 궤도에 24 개의 위 성을 그림 5-29(b) 처럼 배치하고 있는데, 여기서 한 궤도당 세
개는 여분의 위성이 된다. 반면에 구소련의 시스템은 더 적은 수 의 위성을 사용하고 있다. 두 시스템 모두 3 차원 위치 정보와 속 도 자료를 제공하며, GPS 시스템이 완전히 작동하게 되면 TRANSIT 시스템을 대치하게 될 전망이다. 참고 문헌 Gelb, A., 1974, Ap pli ed Op tim al Esti m ati on (MIT Press : MIT) . Kalman, R. E., 1960, ]. Basic Eng ., March, pp. 35-44. Kalman, R. E. and Bucy, R. S., 1961 , ]. Basic Eng. , March, pp. 95-108. Patt an , B., 1 993, Sate l lite Sys t e m s (Van Nosta r and Rein h old : New York). Pocha, J. J., 1987, An Intr o duc tion to Mi ssi o n Desig n for Geosta t i on ary Sate l lite ( Reid e l : Dordrecht) . Pritc h ard, W. L., Suy d erhoud, H. G., and Nelson, R. A., 1993, Sate l lite Communic a ti on Sys t e m s Eng ine eri ng , 2nd ed. (Prenti ce Hall : Eng le wood Cli ffs) . Tap le y, B. D., 1973, Sta tistica l Orbit Dete r mi na tio n Theory in Recent Advances in Dyn ami ca l Astr o nomy ed B. D. Tapl e y and V. Szebehely ( Reid e l : Dordrecht) . Tapl e y, B. D., Schutz , B. E., and Born, G. H., 1993, Sate l lite Orbit Dete r mi na ti on (Cente r for Sp a ce Research : Austi n) . Wertz , J. R., ed. 1978, Spa cecraft At titzed e Dete r mi na ti on and Contr o l (Reid e l : Dordrecht) . Wert z, J. R. and Larson, W. J., ed. 1991 , Sp ac e Mi ssion Analys i s and Desig n (Reid e l : Dordrecht) .
-lr:-:더1 로 A. 평균 궤도 요소로부터 위치와 속도 벡터 산출 컴퓨터 모의 실험을 하기 위해서 북미 대공방위사령부 (Nor t h Americ a n Ai r Defe n ce Command, NORAD) 에 서 나오는 위 성 의 궤 도 요소인 Two Lin e Element (TLE) 를 이 용하여 위 성 의 위 치 와 속도를 산출하는 알고리즘을 만들어 보자. NASA 의 TLE 는 평균 궤도 요소이다. 평균 궤도 요소에다 단주기 섭동항, 장주기 섭동항, 영 년 섭 동항을 더 하면 접 촉 궤 도 요소 (Osculati ng Orbit al Element) 가 된다. 여 기 서 구한 접 촉 궤 도 요소로부터 위성의 위치와 속도를 추정할 수 있게 된다. 평균 궤도 요소에서 접촉 궤도 요소로 바꾸는 방법은 Kozai( 1 959) 방법을 사용하였 고, 이 방법 은 Sim p lified General Pertu r bati on (SGP) 라고 부 르고있다. NORAD의 TLE 는 기산점 시각(to ), 평균 각속도 (no)' 평균 각가속도(如 /2), 평균 각가가속도 (n/6), 그리고 평균 궤도 요소 인 궤도 이심률 (eo), 승교점 적경 (.!Jo)' 근지점 인수((JJ o)' 평균 근접각 (Mo) 으로 구성되어 있다. 궤도의 평균 장반경은 ao=a 屯― ½01-or- 덮 미 A.1
이고, 여기서 a1=( 엽 마 &=—43 hJ T, —R aT EfB (3 (c1 os-2e i51 ) - {3 l ) GME B =3.9 8 60045x 1 05 km3/s 라 R 젊 =6378.14 km, ]2=1.0 8 26271 X 10-3 이다. 평균 수직 단반경은 Po= 互 o(l- e5) A. 2 이고, 평균 근지점 거리는 互 o= ao (l-eo) A. 3 이고, 위성의 평균 경도는 工。 = Mo + wo + .f2 A. 4 이다. 영년 섭동을 포함한 궤도 요소는 효=교+뿜(t-t o) A. 5 w= 軒뿜(t―t o) A. 6 工=工。+ ( no+ 뿜룹) (t-to) + 붕( t —to ) 2 릉(t 一 to) 3 A. 7 이고, 여기서 (t-t o) 는 기산점 이후의 시간이고 뿜=―拉營 nocos ;。 A. 8
뿜국 ]2 信 no (5 cos2 ;。 —1) A. 9 이다. 장주기 섭동을 포함한 궤도 요소는 es= 百 sin w— 2+ 4J2- ~P os in i 。 A.10 工 '=L ―鬪營 ec sin zo[~] A. 11 이고, 여기서 정 c=ecosw o] 다. E+ 硏에 대한 케플러 방정식을 풀기 위해 Newt o n-Raph son 방법을 사용하면, 초기값은 (E+ w)1=U 라고 놓고 케플러 방정식을 New t on-Ra p hson 을 풀면 (E+ w) ;+1= (E+ 面) i+ 4(E+ 5) ,. A. 12 여기서 4(E+5)i= u—정 s Si_ n (E+ 5) 1.-_ 흉 c cosA (E+ w)..+1 . 13 U=L’ 一요 A. 14 이다. 평균 궤도에 대한 매개 변수를 계산하면 다음과 같다. e cos E= 정 c COS (E+ w) + es sin (E+ w) A. 15 e sin E= ec sin (E+ w) — es cos (E+ w) A. 16
335
e'2= 탸+ 하 AlA7llA82A9 0 75'= a (l-e' 2) ··· E=ta n-1(~) r = 互 (l-e cos E) 속도의 동경 성분은 r= GM EB 걸r\ 百 s i n£ A. 21 이고, 속도의 횡성분은 言 =GM 근工r A. 22 이고, 위성의 위도인수는 [=tan -1( ::ns ; ) A. 23 이고, 여기서 s i nl= 롭 [s i n (E+ ciJ) - es\: 字] A. 24 cosl= 룹 [cos (E+ w) - ec+ es~ 字] A. 25 이다. 단주기 섭동항을 포함한 접촉 궤도 요소는 r= r +부4 보T탸' i n2zcos 2! A. 26
l= l- 붉룹(:-곱 sin 2 z) sin 2l A27A28A29 Q=죠+요4 ]2T~'C2 OSz sin 2l .. i= t-: +-34] J2 L —R7一52-1®2s i. nz-: cos z-: cos 21 이다. 궤도면에서 동경 방향 (U) 과 횡방향 (V) 의 단위 방향 벡터는 U=M sin l +N cos l A. 30 V=M cos l-N sin l A. 31 이라고 정의하고 여기서 M = ( :0\n::C10\ost1 ) A. 32 N= (:;ns0 요요) A. 33 실제의 위성 위치와 속도 벡터는 7=ru A. 34 戶= rD+ (rv) V A. 35 이다. 참고문헌 Kozai, Y., 1959, Astr o n. J, 64, 367.
찾아보기
기 관측자 중심 좌표계 top o centr i c coordin a te 16 고도 elevati on 16 그레 고리 안 일 Greg o ria n day 24 균시 차 equ ati on of tim e 26 그리 니 치 시 간각 Greenwi ch hour ang le 2 S 그리 니 치 평 균시 Greenwi ch mean tim e 27 Gudermann 함수 Gudermann fun cti on 56 궤 도의 교정 orbit recti fica ti on 1 Ss 가우스형 섭동 방정식 Gaussia n pe rtu r bati on eq u ati on 189 근점주기 anomalis t i c pe rio d 216 궤 도 조정 계 획 orbit maneuver pla n 291 경 사진 타원 궤 도 ellip tica l inc lin e d orbit 314 L 내 부 라그랑지 점 inn er Lang ran g ian po in t 97 남북 방향 위 치 유지 nort h-s outh sta t i on keep ing 297 E 二 대 기 항력 air drag 200 달과 태 양에 의한 섭동 !uni- s o lar pe rt ur bati on 219 동서 방향 위 치 유지 east- w est sta t i on keep ing 278 근 라그랑지 점 Lag ra ng ian po in t 96 로슈로브 Roche lobe 1oo 라그랑지 안 해 Lag ran g ian soluti on 104 Levi- C iv i t a 방법 Levi- Civi t a meth o d 130
라그랑주 괄호 Lag ran g ian bracket 163 라그랑주 방정식 Largr an g ian equ ati on 161 라그랑주형 섭 동 방정 식 Lag ra ng ian pe rt ur bati on eq u ati on 184 □ 매개변수 변화법 varia t i on of pa ramete r 162 미 분 보정 deff er enti al correcti on 243 닌 방위각 azim uth 16 Brouwer 의 평균 장반경 Brouwer mean semi -m ajo r axis 216 배 치 모드 batc h mode 248 人 수평 좌표계 horiz o nta l coordin a te sys t e m 16 시 간계 tim e sys t e m 24 세 계 시 univ e rsal tim e 24,25,27 상대 운동 relati ve moti on 31 수적 단반경 semi -l atu s rectu m 34 쌍곡선 궤 도 hy pe rboli c orbit 49 Sundman 121 섭 동론 per t ur bati on the ory 143 섭동 방정식 pe rt ur bati on equ ati on 177 섭 동 함수 dis t u r bin g func ti on 193 상태 벡 터 sta t e vecto r 248 3 축 지구 모형 tri a x ia l eart h model 279
。 역 표시 eph emeris tim e 27 원자 시간 ato m i c tim e 27 2 체 문제 tw o body pro blem 29 위 성 의 출몰시 각 ris e -and-set tim e of sate l lite 71 우주 속도 cosmi c veloc ity 7 5 영 속도 곡선 curves of zero velocit y 92 의 부 라그랑지 점 oute r Lag ran g ian po in t 97 오일러 적분 Euleria n int e g ral s 104 N 체 문제 N-body pro blem 109 N 체 계산 N-body calculati on 117 Encke 방법 Encke meth o d 155 일반 섭 동론 ge neral pe rtu r bati on 161 인공위 성 의 특수 궤 도 spe cia l orbit s o f sate l lit e 302 f와 g의 급수전개 f and g serie s 62 x; 좌표계 coordin a te s sys t e m 15 적 도 좌표계 eq u ato r ia l coordin a te s 18 적 경 rig h t ascensio n 18 적 위 declin a ti on 18 지 리 좌표계 ge og rap h ic coordin a te sys t e m 20 지 심 위 도 ge ocentr i c lati tud e 21 줄리 언 일 Ju li an day 24 직 각 쌍곡선 eq u il at e r al hy pe rbola 52 제 한 3 체 문제 restr i c t e d three body pro blem 83 자코비 적 분 Jac obia n int e g ral 86 정 칙 화 regu la riz a ti on 120 중력 퍼 텐셜 grav itat i on al po te n ti al 145 접촉 궤도 osculati ng orbit 156
지구 정지 궤도 ge osta t i on ary orbit 303 준태양 동주기 궤도 sem i - s y nchronous orbit 330 天 축지 위 도 ge odeti c lati tud e 21 최 적 추정 이 론 op tim al esti m ati on the ory 243 추정 이 론 esti m ati on the ory 244 최소 분산 추정법 mi ni m um varia n ce esti m ati on 258 구 케 플러 방정 식 Kepl e r's e qu ati on 34 Kusta a nheim o-sti ef e l 방법 135 Cowell 방법 144 Ki rk wood 톰 167 Koza i의 평균 장반경 216 컴퓨터에 의한 수식 처리 alge braic manip u lati on by comp u te r 23 2 드 타원 궤 도 elli ptic orbit 40 특이 점 sin g ula r po in t 120 특수 섭동론 spe c i al per t urb ati on 143 태 양상수 solar consta n t 200 태 양의 복사압력 solar radia t i on pre ssure 200,285 툰드라/고리 궤도 Tundra/loop u s orbit 316 태 양 동주기 궤 도 sun-syn c hronous orbit 319
끄 편 평 도 flat t en in g 20 포물선 궤 도 pa rabolic orbit 47 평균 궤도 요소 meja n orbit al elements 218 끈 황도 좌표계 eclip tic coordin a te sys te m 19 황경 eclip tic long itud e 19 황위 eclip tic lati tud e 19 환산 위도 reduced lati tud e 21 호도그래프 hodog r ap h 45, 57 행 성 간 우주선 int e r pl a neta r y sp a ceship 77 확률 변수 pr obabil it y varia b les 258 확 률 분포 pr obabil i ty dis t r i b u ti on 258 확장 칼만필터 exte n ded Kalman filter 272
 최규홍
최규홍
 --- -- - - --- -
--- -- - - --- -